Статья опубликована в рамках: XXXII Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 26 мая 2015 г.)
Наука: Математика
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

МАТЕМАТИЧЕСКАЯ ОЦЕНКА ЭФФЕКТИВНОСТИ РАБОЧЕГО МЕСТА СУДОВОДИТЕЛЯ
Иванцов Владимир Александрович
студент 1 курса, кафедра судовождения ФГБОУ ВО «КГМТУ», РФ, г. Керчь
Е-mail : vivantsow@mail.ru
Куликовский Валерий Вадимович
студент 1 курса, кафедра судовождения ФГБОУ ВО «КГМТУ», РФ, г. Керчь
Е-mail : kulikovskii1997@mail.ru
Хапугин Вадим Андреевич
студент 1 курса, кафедра судовождения ФГБОУ ВО «КГМТУ», РФ, г. Керчь
Е-mail : pympa-vadim@mail.ru
Василенко Марк Игоревич
студент 1 курса, кафедра судовождения ФГБОУ ВО «КГМТУ», РФ, г. Керчь
Е-mail : vasilenkomark@gmail.com
Егорова Светлана Николаевна
научный руководитель, старший преподаватель кафедры высшей математики и физики ФГБОУ ВО «КГМТУ», РФ, г. Керчь
Актуальность.
Вопрос совершенствования штурманской службы привлекает широкое внимание отечественных и зарубежных специалистов, поскольку этот вопрос теcно связан с производительностью труда, надежностью системы «человек-машина», безаварийностью, зависит от уровня профессионального мастерства штурманского состава, новизны навигационного и промыслового оборудования [2].
Внедрение информационных технологий позволило освободить судоводителя от выполнения однообразных рутинных действий, снабдило его необходимой информацией в удобной и наглядной форме. В системах управления морскими судами (на ходовых мостиках судов) появились электронные карты, системы автоматической радиолокационной прокладки, автоматические идентификационные системы, компьютерные системы для выполнения грузовых операций и многое другое.
Несмотря на хорошую техническую оснащенность современных судов, вопрос об эффективности рабочего места судоводителя продолжает играть одну из основных ролей в процессе правильной эксплуатации судового оборудования, обеспечивающего безопасность плавания.
Анализ публикаций. Вопросам обеспечения и повышения безопасности мореплавания, судовым системам управления, автоматизации рабочего места судоводителя посвящено немало работ [1—6; 8].
Заслуживает внимание работа [2], посвященная исследованию деятельности судоводителя промыслового судна и возможных путей ее оптимизации. Автор рассматривает возможности оптимизации и повышения эффективности работы судоводителя на рыболовецком судне типа «Горизонт», где ходовой мостик совмещен с кормовой и штурманской рубками. Проблема заключалась в том, что при таком расположении помещений, судоводителю приходилось слишком долго перемещаться между приборами, а из разных частей мостика обзор был неполным или его практически не было. Р.Б. Брандт старался решить эту проблему лишь заменой приборов местами, уменьшением расстояния между ними, ликвидацией переборок и стен между помещениями и приборами, а также внося некоторые коррективы в структуру судна (например, предлагал целесообразно располагать дымоходные трубы и мачты, чтобы избежать появления так называемых «мертвых» зон в обзоре окружающего пространства из рубки).
В период его исследований это было единственным способом оптимизации рабочего места судоводителя и его функциональности. Именно поэтому мы решили сравнить его работу и современные исследования по данному вопросу, где с внедрением информационных технологий работа судоводителя сводится вплоть до удаленного управления судном.
Целями нашего исследования стали:
1. изучение математических основ и особенностей работы судоводителя;
2. исследование зависимости эффективности работы судоводителя от архитектуры его рабочего места;
3. получение ряда количественных характеристик деятельности судоводителя и исследование влияния на них размещения аппаратуры в рубке.
Цели работы определили главную задачу: на основании ряда количественных характеристик деятельности судоводителя сопоставить возможные пути оптимизации рабочего места, выявить наиболее актуальные и целесообразные способы решения этого вопроса.
Основное изложение вопроса. Рассмотрим деятельность штурмана на ходовом мостике с количественной стороны.
Размещение приборов на ходовом мостике судна в процессе проектирования осуществляется на основе накопленного опыта: либо это экспертные оценки специалистов, либо традиции. Научное обоснованное решение этого вопроса возможно только при количественном анализе деятельности вахтенного штурмана. Цель такого анализа — получить ряд количественных характеристик деятельности и исследовать влияние на них размещения аппаратуры в рубке. Информацию о количественных характеристиках работы судоводителя в рубке можно получить, хронометрируя судовые вахты в форме кинограмм.
В работе [2] было выбрано несколько наборов характеристик: частота обращения, время перехода от одного прибора к другому, продолжительность работы с прибором в течение вахты, по различным типам промысловых судов в различных производственных ситуациях, в естественной рабочей обстановке. Это привело к необходимости применить для обработки результатов хронометража приёмы математической статистики, такие как получение средних значений и средних квадратичных отклонений.
Обозначим номера приборов нижними индексами ![]() ,
, ![]() =1, 2…
=1, 2… ![]() , где
, где ![]() — общее число приборов в рубке. Тогда введём
— общее число приборов в рубке. Тогда введём ![]() — среднюю частоту общений от прибора с номером
— среднюю частоту общений от прибора с номером ![]() к прибору с номером
к прибору с номером ![]() . Сумма частот по всем номерам
. Сумма частот по всем номерам ![]() даёт общую среднюю частоту обращения к прибору с номером
даёт общую среднюю частоту обращения к прибору с номером ![]() за вахту:
за вахту:
![]() (1)
(1)
Среднее время работы за вахту:
![]() , (2)
, (2)
где ![]() — среднее время работы с прибором
— среднее время работы с прибором ![]() за один подход.
за один подход.
Аналогично можно ввести общее среднее время, затраченное на однократные переходы к прибору ![]() :
:
 , (3)
, (3)
где ![]() — среднее время перехода от прибора
— среднее время перехода от прибора ![]() к прибору
к прибору ![]() .
.
Это время перехода к ![]() -му прибору, пользуясь эргономической терминологией, можно назвать временем подготовки
-му прибору, пользуясь эргономической терминологией, можно назвать временем подготовки ![]() -й операции — однократной работы с
-й операции — однократной работы с ![]() -м прибором.
-м прибором.
Считая скорость перемещения судоводителя в рубке примерно постоянной, независимо от ситуации и номера операции, можно вместо времени ![]() ввести его координаты. Для этого в план рубки вводится произвольная система декартовых координат, где ось OX — по линии лобовой переборки, ось OY — по линии диаметральной плоскости и в этой системе каждый прибор получает свои координаты
ввести его координаты. Для этого в план рубки вводится произвольная система декартовых координат, где ось OX — по линии лобовой переборки, ось OY — по линии диаметральной плоскости и в этой системе каждый прибор получает свои координаты ![]() :
:
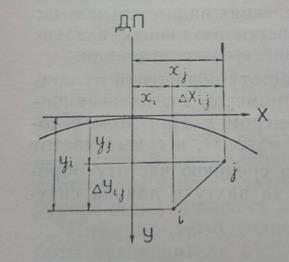
Рисунок 1. Система декартовых координат в рубке
Тогда расстояние между приборами ![]() и
и ![]() :
:
![]() (4)
(4)
где ![]() ,
, ![]() — проекции этого расстояния на выбранные оси координат.
— проекции этого расстояния на выбранные оси координат.
Обозначив скорость перемещения судоводителя в рубке ![]() , можно записать:
, можно записать:
![]() , (5)
, (5)
![]() . (6)
. (6)
Введенный набор средних величин можно представить комплексом в виде ориентированного графа, вершины которого соответствуют определенному прибору, а дуги — отношениям между приборами. Количественно можно сопоставить вершины и время работы с прибором, соответствующим данной вершине, дуги и частоту взаимных обращений между вершинами и расстояние между ними. На рис. 2 приведены экспериментально полученные значения вероятности использования судоводителем наиболее важных навигационно-промысловых приборов.
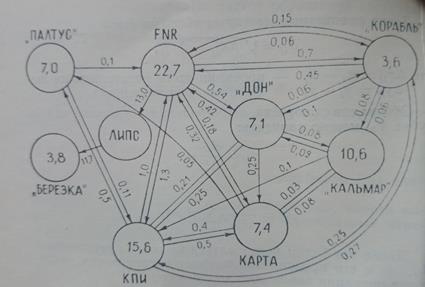
Рисунок 2. Вероятность обращения к навигационно-промысловым приборам
Эти данные можно ориентировочно использовать при размещении приборов на ходовом мостике. Например, вероятность обращений от FNR к ЛИПСу, от FNR к КПИ, от ЛИПСа к «Березке» достаточно высока. Отсюда следует, что эти приборы должны располагаться рядом.
В нашей работе мы также исследовали эффективность расположения средств управления навигационной и гидроакустической аппаратурой на судне Alexander B типа контейнеровоз. Вместимость: 14072 т., тоннаж: 18530 т.

Рисунок 3. К онтейнеровоз Alexander B
Данные наблюдений приведены в табл. 1, где в 1-й строке указаны названия приборов, во 2-й строке показано время одного обращения к прибору (в секундах ), в 3-й строке показано количество обращений к прибору за вахту, в 4-й строке показана общая длительность использования прибора за вахту (в секундах).
Таблица 1.
Количественные характеристики использования навигационной аппаратуры контейнеровоза Alexander B
|
Радар |
GPS |
Электр. карты |
AIS |
Гиро- компас |
Секс-тант |
Курсо- граф |
Эхо-лот |
Баро-граф |
|
≈3—4 |
≈5—6 |
≈5—6 |
≈5—6 |
≈10—15 |
≈10 |
≈7—8 |
≈5 |
≈3—4 |
|
5—8 |
4—5 |
10 |
10 |
10 |
5—6 |
1—2 |
3—4 |
1—2 |
|
15—32 |
20—30 |
50—60 |
50—60 |
100—150 |
50—60 |
10—20 |
20—30 |
5—10 |
Анализ наблюдений показывает, что контейнеровозы указанной модификации современной постройки (2006 г.) имеют наиболее удачное эргономическое расположение приборов на ходовом мостике. Среднее время обращения к прибору минимизировано, все приборы компактно размещены:
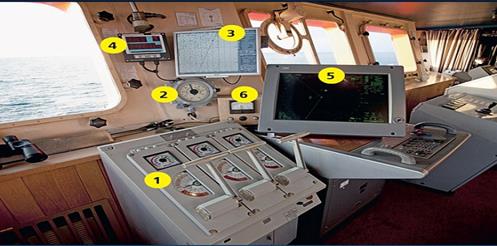
Рисунок 4. Размещение навигационного оборудования: 1) пульт управления электродвигателями; 2) аксиометр — указатель положения руля; 3) электронная картография; 4) репитер (повторитель) эхолота и лага; 5) радиолокационная станция; 6) датчик тягового усилия лебедки
Штурман сидит на мостике вместе с остальными членами команды. Кроме классических линеек и циркулей ему помогает современное оборудование: два GPS-навигатора и автоматическая система идентификации судов в радиусе 30 миль (нижний ряд), репитеры лага и гирокомпаса, метеостанция (средний ряд), два эхолота с самописцем (верхний ряд) на рис. 5.

Рисунок 5. Классическое оборудование
Перспективные исследования в области эргономики судовождения [3; 6] показывают, что в 2025 году капитанские мостики на грузовых кораблях будут выглядеть совершенно не так, как они выглядят сейчас. Основываясь на исследовании работы и нужд капитана, а также его помощников и команды, Университет Аалто, VTT и Rolls-Royce Marine разработали уникальную концепцию универсального капитанского мостика с дополненной реальностью:

Рисунок 6. Капитанский мостик будущего
Это будет система, способная распознавать каждого члена команды и подстраиваться под его индивидуальные нужды: показывать на экране, который занимает всё стекло рубки, различную запрашиваемую информацию, регулировать спинку кресла, и многое другое. На экране могут отображаться невидимые из-за тумана препятствия, курс самого корабля и проходящих рядом морских судов, он позволит членам экипажа обмениваться между собой информацией и видеть в тёмное время суток. Кроме всего прочего, бортовой компьютер будет сообщать эти данные другим кораблям.
Параллельно с этим проектом разработчики планируют реализовать ещё одну идею: ввести дистанционное управление кораблями . Предполагается, что это позволит повысить безопасность и эффективность морских грузоперевозок и путешествий. Автономные системы начнут проникать в крупные морские суда уже в самом ближайшем будущем, и VTT и Rolls-Royce уже работают над их первым поколением. Первоначально они будут включать в себя блоки контроля, которыми можно будет дистанционно управлять с мостика или с суши. «С позиции требуемых технологий, дистанционное управление контейнерным судном возможно уже сейчас», говорит VTT в официальном релизе [6]. «Однако, до того как полностью автономные грузовые суда выйдут в море, эта концепция должна получить повсеместное общественное одобрение» [там же]. И это произойдёт до того, как VTT и Rolls-Royce создадут новый капитанский мостик будущего, и первые дистанционно управляемые корабли заступят на свою службу уже в ближайшие годы.
Вывод ы. Исходя из результатов проделанных исследований, можно утверждать, что управление судном представляет собой большой комплекс взаимодействия технических средств и человека-оператора. Проведенная математическая оценка эффективности рабочего места судоводителя доказала необходимость эргономичного размещения навигационного оборудования. Использование автоматизированного рабочего места поможет повысить эффективность и безопасность мореплавания. На данный момент уже имеется система, находящаяся на стадии разработки, которая может выполнить данные требования по обеспечению требуемого уровня безопасности. Если будет принято решение о вводе данной системы в эксплуатацию, значительно уменьшится количество аварийных случаев и упростится порядок управления судном.
Список литератур ы:
1.Адерихин И.В., Воротынцева М.Г. Метод оценивания показателей готовности системы управления судном. Научный журнал «Вестник Астраханского государственного технического университета». Астрахань: Изд. АГТУ, — № 2, — 2005. — С. 199—204.
2.Брандт Р.Б. Эффективность и качество работы судоводителя. Мурманск: Мурманское книжное издательство, 1978. — 112 с.
3.Вагущенко JI.JI. Интегрированные системы ходового мостика. Одесса: Лат-стар, 2003. — 170 с.
4.Воротынцева М.Г. Методика оценивания показателей функционирования эргатической системы управления морским судном: дис…канд. т. н. [Электронный ресурс]. — Режим доступа: — URL: http://www.dissercat.com/content/metodika-otsenivaniya-pokazatelei-funktsionirovaniya-ergaticheskoi-sistemy-upravleniya-morsk (дата обращения: 20.01.2015).
5.Зеленин М.П. Эргономика на морском транспорте. М.: Транспорт. 1980. — 276 с.
6.Концепт виртуального капитанского мостика от Rolls-Royce: корабль без экипажа [Электронный ресурс]. — Режим доступа: — URL: http:// www.novate.ru/blogs/151214/29126 (дата обращения: 20.01.2015).
7.Пустальнин Е.И. Статистическая обработка результатов наблюдений. М.: Физматгиз, 1968. — 216 с.
8.Чертов В.В. Методика оценивания готовности эргатической системы управления судном к решению задач расхождения. Диссертация на соиск. уч. степени к.т.н. МГАВТ. М., 2001. — 172 с.
дипломов