Статья опубликована в рамках: XXXII Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 26 мая 2015 г.)
Наука: Технические науки
Секция: Космос, Авиация
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
отправлен участнику

ОРБИТАЛЬНЫЙ КОМПЛЕКС ПО ОБСЛУЖИВАНИЮ ЛУННЫХ КОСМИЧЕСКИХ АППАРАТОВ НА ОКОЛОЗЕМНОЙ ОРБИТЕ
Ли Ян Евгеньевич
студент 4 курса, кафедра «Конструкция и испытания летательных аппаратов» филиала «Восход» МАИ, РФ, г. Байконур
E . mail: fan2mas@list.ru
Нуртаева Шынар Бахитбековна
студент 4 курса, кафедра «Конструкция и испытания летательных аппаратов» филиала «Восход» МАИ, РФ, г. Байконур
E -mail: shinara.nurtaeva@mail.ru
Абильдаева Кенжегуль Жалгасбаевна
научный руководитель, старший преподаватель кафедры Б11 — «Конструкция и испытание летательных аппаратов» филиала «Восход» МАИ, РФ, г. Байконур
Основные задачи для решения, которых создается комплекс
· проведение обслуживания лунных космических аппаратов, включая орбитальный комплекс обслуживания;
· использование орбитального комплекса для монтажа и строительства на ОЗО лунных КА в беспилотном и пилотируемом вариантах;
· проведение ремонтных и регламентных работ и операций обслуживания на орбите ИСЗ крупногабаритных КА и др.;
· осуществление стартов орбитального комплекса лунных кораблей и других аппаратов и приема при возвращении космонавтов и различных грузов на Землю;
· проведение фундаментальных и прикладных исследований на борту орбитального комплекса;
· использование комплекса в различных коммерческих программах, в то числе для проведения туристических полетов на орбиты Земли и Луны;
· выполнение совместных космических программ с другими государствами.
По принятой концепции орбитальный комплекс (ОК) должен осуществлять захват и перенос специальными приспособлениями грузов, доставляемых транспортными космическими аппаратами (ТКА) к местам монтажа и сборки. При этом должен обеспечиваться комфорт для космонавтов, учитывая сложность и трудоемкость проводимых ими работ. Стандартный экипаж (сменный) ОК должен составлять 3—5 человек.
В связи с этим, мы предлагаем следующий облик орбитального комплекса.

Рисунок 1. Облик орбитального комплекса
· КАС предназначен для доставки экипажей на орбитальный комплекс, возвращение их на Землю, а также покидание комплекса в аварийных ситуациях, смены экипажей космическими кораблями типа «Союз-ТМА»; ППТС (перспективная пилотируемая транспортная система) или КК «Орион» (США) соответственно массой 7 т, 14,5 т, 15 т.
· Жилой модуль является тем элементом комплекса, в котором космонавты отдыхают и принимают пищу. Жилой модуль представляет собой аналог российского сегмента МКС «ФГБ» (функционально-габаритный блок) с шаровым модулем с пятью стыковочными узлами. Масса 19 т, длина 16 м.
· Ресурсный модуль предназначен для обеспечения ОК всеми расходными материалами и служит сегментом для стыковки и сборки, монтажа космических объектов.
· Лабораторный модуль (типа «МЛМ» российский сегмент МКС) со стыковочными узлами для приема транспортных космических кораблей (ТПК «Союз-ТМА; ТГК «Прогресс-М») и других модулей. Предусматривает создание в одном комплексе оборудования для проведения широкого спектра исследований. Модуль представляет аналог ФГБ-1 «Заря» длиной 13 м, массой 20 т.
· Модуль космического мониторинга и управления (МКМУ) служит для ориентации стабилизации и управления ОК, изучения и наблюдения за динамикой управления положением всего комплекса. Данный модуль представляет собой аналог российского сегмента МКС (служебного модуля с двумя стыковочными узлами длиной 13 м, массой 20 т.)
· Основная монтажная ферменная конструкция предназначена для монтажа и сборки космических объектов. Общая длина фермы 72 метра.
· Ферменная балка с системой электропитания служит для обеспечения электроэнергией всего комплекса. На ОК предусмотрены две ферменные балки с СЭП. Масса одной балки с СЭП — 8 т.
Транспортное обеспечение
Как уже было упомянуто выше, ОК представляет собой конструкцию, которую невозможно за раз вывести на орбиту. Поэтому вся конструкция разделена на блоки, которые по отдельности выводятся на ОЗО и там уже монтируются в одну единую конструкцию. Сборка ОК начинается с выведения на ОЗО с жилого модуля ФГБ «Заря» РН «Протон» массой 19 т.
Следующим запусками РН «Ангара -5» на орбиту выводятся ресурсные модули массой по 25 т. каждый. Ферменные конструкции массой 35 т. выводятся двумя последующими пусками РН «Протон-М». Далее, предусматривается выведение на ОЗО составляющих ОК: жилые модули типа российского сегмента МКС «ФГБ» массой по 19 т и лабораторные модули типа МЛМ российского сегмента МКС по 20 тонн каждый. Кроме того, к уже собранным ферменным конструкциям пристыковываются ферменные балки с СЭП по 8 т. каждая. Последними на орбиту доставляются ОКО и МКМУ.
Таким образом, после завершения серий пусков, вся система технических средств полностью вводится в строй. Далее, орбитальный комплекс обслуживается полетами ТКА типа «Союз–ТМА, ТГК «Прогресс-М», ППТК (Россия), КК «Орион» (США) и другими средствами.
Ферменные конструкции

Рисунок 2. Схема ферменной трубки: 1 — наконечник с резьбой; 2 — графитопластиковая трубка
Исходя из массо-прочностных характеристик, в качестве материала для ферменных конструкций был выбран эпоксидный графитопластик AS-1/3501-6 ф-мы Hercules Aerospace Company.

Рисунок 3. Основа ферменной конструкции
Основой ферменной конструкции является куб со сторонами 3 м, из труб диаметром 5 см и толщиной стенок 6 мм. На концах каждой трубки крепится наконечник (с резьбой из стали AISI-301 EH), работающий при широком диапазоне температур от 80 до 700 К и обладающий не меньшей прочностью. Наконечники крепятся в трубе на клею (FM-123-2 ф-мы American Ciamid). Они предназначены для присоединения трубок между собой путем вкручивания в специальные узловые элементы. Каждая труба выдерживает нагрузку на растяжение 1377,6 кН. Удельная масса ферменной конструкции 40,45 кг/м. Общая длина ферменной конструкции 72 метра, масса около 40 т.
Основой орбитального комплекса по сборке и обслуживанию на ОЗО лунных космических аппаратов для полетов на Луну является основная ферменная монтажная конструкция. Она предназначена для установки, монтажа и сборки космических кораблей крупных размеров.
Сама конструкция представляет собой ферменную балку в виде треугольной конструкции длиной 70 метров.
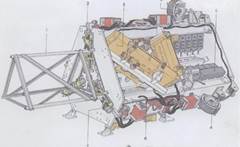
Рисунок 4. Сборочный модуль
На верхней поверхности ферменной балки располагается мобильный сборочный модуль. Платформа «передвигается» по рельсам ферменной балки и обслуживает строящийся космический корабль. На ней предусмотрены манипуляторы-рукава, с различной длиной: 15 м, 20 м, 30 м, со специальными захватами, приспособлениями для фиксации конструкций.
В конструктивном плане модуль представляет собой совокупность двух взаимосвязанных объектов: агрегатного и герметичного.
Другие технические средства
Основой комплекса обслуживания является ферменная конструкция длиной 72 метра четырехугольной конструкции. Посередине размещается стапель-конструкция захватным устройством и поворотным столом с разворотом на 360 градусов строящегося космического аппарата.
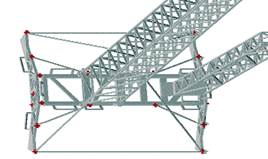
Рисунок 5. Поворотный стол
Снизу размещается модули обслуживания с робототехническим комплексом. Также, там же в перспективе будут размещены герметичные ангары и негерметичные платформы для обслуживания КА. Впоследствии при осуществлении миссии на другие планеты здесь же могут быть размещены карантинные модули.
На концах ферменной конструкции размещены жилые модули, предназначенные для посещения экипажами космических кораблей, для приема ПН, предназначенные для постройки межпланетных кораблей. Завершают архитектуру комплекса сегменты ферменной конструкции с СЭП.
С правой стороны, от центра по рельсам перемещаются вдоль фермы мобильные центры обслуживания. Они используются для перемещения ПН от места отправки к месту строительства КА.
С левой стороны, впервые, используются для обслуживания строящегося КА мачта обслуживания с кабинами, постами управления и мобильными системами обслуживания. Мачта обслуживания может с горизонтального положения, развёрнута вертикальное положение, т.е. этим достигается доступ обслуживающего персонала к КА. Сбоку и снизу располагаются рельсы для мобильных средств (платформы, дистанционно-управляемые средства, робототехнические комплексы).
На стапеле, вращающемся столе планируется сборка лунных и марсианских кораблей (ЛДОС, ЛГТК, УСП, ЛЭК, МЭК, АГК).
Телеуправляемые космические роботы (ТКР)
Планируется использовать свободно летающий ТКР FTS (Martin Marietta), спроектированный по контракту с центром космических полетов NASA им. Годдарда, ТКР имеет антропоморфический корпус (подобный телу человека), к которому крепятся два электромеханических манипулятора, каждый имеет форму человеческой руки; третья рука используется для фиксации ТКР на рабочем месте. Система обзора ТКР включает четыре телекамеры. Концевые приспособления манипуляторов снабжены металлическими защелками, а также датчиком усилий.

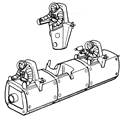

Рисунок 6. Свободнолетающие ТКР, управляемые космонавтами
Другой тип ТКР, представляет собой электромеханический манипулятор целевого назначения с дистанционным управлением (телеробот), по которому подразумевается либо дистанционное управление космонавтом-оператором под его непосредственным наблюдением (супервизирование), либо работа в автоматическом режиме по заданной программе.
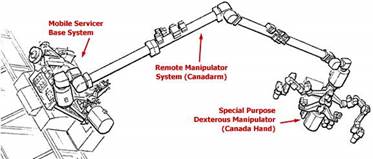
Рисунок 7. Рука-манипулятор
Мобильная система обслуживания
Разрабатываемая канадскими специалистами мобильная система обслуживания MSS. Представляет собой более сложный и многоцелевой объект.

Рисунок 8. Робот-сервисер
Его основными компонентами являются транспортёр МТ, перемещающийся вдоль несущей конструкции орбитального комплекса, соответственно центр обслуживания MSC, который может устанавливаться на транспортёре с помощью стыковочного узла, а также дистанционный манипулятор SSRMS, для повышения возможности последнего на его рабочем конце впоследствии может быть установлен дополнительный манипулятор SPDM .
Раздвижная ферма обслуживания
Как мы знаем, ферма обслуживания используется на стартовых комплексах (СК Бармина РН «Союз», РН «Протон» и др. РН). С помощью ферм обслуживания осуществляется доступ персонала по обслуживанию РН.
От центра, от базового блока, слева от орбитального комплекса, планируется поместить ферму обслуживания, которая в исходном положении «лежит» на ферменных конструкциях. В рабочее положение ферма обслуживания устанавливается вертикально. Для удобства и целесообразности при обслуживании персоналом и робототехническими средствами строящегося, например лунного корабля, ферма обслуживания может «находиться» от 2-х до 6 метров от ПН. Создаваемое пространство, позволяет персоналу свободно принимать решения, собирать и перемещать, перестраивать объекты (узлы, детали, блоки, конструкции). Кроме того, ферма обслуживания может раздвигаться до нужной длины от 8 до 30 метров. Габариты в сложенном виде 8 м х 4 м х 2 м.
На ферме обслуживания планируется разместить специальные кабины обслуживания, посты обслуживания с канадскими манипуляторами, которые могут подстраиваться к любому узлу строящегося космического корабля. (Например, при установке баков с рабочим телом в районе между РММ и секцией с ПН). В рабочем порядке, по регламенту, соединение бака к космическому кораблю осуществляется космонавтом, космонавтом-оператором и телеуправляемым роботом.
Посты обслуживания и кабины обслуживания могут быть герметичными и негерметичными.
Ангары обслуживания
Размеры ангара обеспечивает размещение большинства существующих и проектируемых КА. Ангар присоединяется в нижней части орбитального комплекса к рабочим модулям, присоединенным к стапелю-конструкции. По всей длине негерметичного ангара имеются герметизированные проходы, проходы диаметром по 3 м, обеспечивающие переход экипажей без скафандров из обитаемых модулей в кабины КА, пристыкованных к внешним узлам. По этим проходам операторы могут переходить для работы в мобильные герметизированные кабины, пристыкованные к узлам проходов или перемещаемых с помощью ангарных манипуляторов.
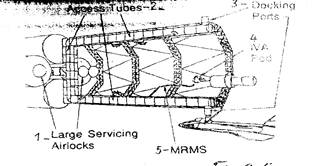
Рисунок 9. Ангар
Проектом предусмотрено использование четырех таких кабин, которые могут применяться в любой зоне ангара. Мобильность кабины обеспечивается установкой ее на конце мощного манипулятора, перемещающегося по рельсам вдоль стенки ангара. Для непосредственного обслуживания объекта кабина оснащается собственными манипуляторами с набором сенсорных и эффекторных средств, управляемых оператором из кабины.

Рисунок 10. Мобильная система обслуживания
При этом, в отличие от процедур надевания скафандра и подготовки оператора к внекорабельной деятельности, технология использования встроенного полускафандра может быть упрощена. Предусматривается, в частности, применение автоматических привязных для надувных элементов фиксации торса оператора в полускафандре.
Требования ДУ комплекса обслуживания
Основной задачей ДУ является обеспечение импульса тяги для поддержания орбиты и управления пространственным положением комплекса. Среди других задач можно указать на использование ДУ для сближения и стыковки с другими космическими объектами, предотвращения столкновения с другими объектами.
Планируется использование кислородно-водородных двигателей, использующие в качестве компонентов топлива продукты электролиза воды, а также электротермические ДУ малой тяги, использующих в качестве компонентов продукты утилизации отходов других систем. Кислородно-водородные двигатели, рассчитанные на 10-летний период должны быть рассчитаны на импульс тяги 67![]() Н
Н![]() с.
с.
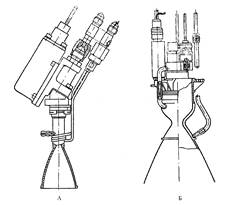
Рисунок 11. ДУ малой тяги
Прототип О2–Н2 двигателя уже прошел испытания. Конструктивное исполнение базового варианта ДУ закладывается в виде четырех независимых блоков, кислородно-водородных двигателей.
Каждый блок включает в себя девять двигателей, баллоны высокого давления с газообразным О2 и Н2 и соответствующие клапаны и устройства управление. Трубопроводы соединяют баллоны с компонентами топлива каждого блока с центральным агрегатом производства О2 и Н2. Блоки предполагается разместить на двух противоположенных направлениях в МКМУ по два. При этом три двигателя в каждом блоке работают для обеспечения маневра по изменению высоты, а остальные – для управления положением вокруг центра масс.
СЭП с оптимальными батареями (СБ)
Более приемлемым для орбитального комплекса является солнечная батарея, которая в настоящее время эксплуатируется на борту МКС. Раздвижная мачта, состоящая из трех эластичных свернутых в кольцо лонжеронов, стальных стержней и растяжек.

Рисунок 12. Раздвижная мачта СБ: где, 1,2 — двигатели, 3 — пружины кручения, 4 — механизм сцепления, 5 — храповый механизм, 6 — рифовый трос, 7 — трос механизма перемещения верхней плоскости панели
При выборе типа фотоэлементов (ФЭП) более подходит арсенид гелия. Для подкладки подложки из двух слоев пленки “кэптон” толщиной 25,4 мкм каждый, соединенных адгезионной пленкой из под. полиэстера такой же толщины. Между ними находится печатная схема из меди толщиной 35,4 мкм, выводы которой припаиваются к ФЭП, что обеспечивает высокую технологичность процесса сборки батарей и возможности сворачивания элементов ФЭП в трубу.
В качестве накопления электроэнергии, на борту комплекса предпочитается использовать никель-водородные аккумуляторы емкостью до 300 А·ч, числом разряд-заряд — 700—1000 циклов при глубине разряда до 80 % за суммарное время эксплуатации до 7—10 лет.
Вывод
На сегодняшний день одной из приоритетных задач развития космонавтики не только в России, но и ряда других стран Европы, является освоение Луны. В России, например, планируют построить обитаемую базу и постепенно разместить испытательные полигоны для накопления и передачи энергии на расстояние, для испытаний новых двигателей. Поэтому первоочередной задачей, является программа по освоению планет Солнечной системы.
Нами был представлен проект орбитального комплекса по сборке и обслуживанию на околоземной орбите космических аппаратов.
Мы считаем, что задачи для решения, которых создается комплекс, вполне адекватны и могут быть оправданы. Луна уже изученная планета. Своими имеющимися свойствами (глубокий вакуум, низкая гравитация, дешевая солнечная энергия и т. д.) она привлекает человечество для более глубоких исследований в области астрономии, металлургической промышленности, электроники.
Разрабатываемый проект является актуальным и перспективным. Ведь дальнейшее освоение и масштабное проникновение человечества на Луну, позволит глубоко изучить дальние области Вселенной.
Список литературы:
1.Андреянов В.В. и др. Автоматические планетные станции. М.: Наука, 1993. — 289 с.
2.Иванов Н.М. Управление движением КА к Луне. М.: Наука, 2003. — 219 с.
3.Марленский А.Д. Основы космонавтики. – М.: Просвещение, 1989. — 349 с.
4.Сердюк В.К. и др. Транспортные средства обеспечения космических программ. М.: ВИНИТИ. Итоги и науки, 1990. — 418 с.
5.Эрике-Краффт. Будущее космической индустрии. М.: Машиностроение, 1988 г. — 518 с.
отправлен участнику