Статья опубликована в рамках: II Международной научно-практической конференции «Научное сообщество студентов: МЕЖДИСЦИПЛИНАРНЫЕ ИССЛЕДОВАНИЯ» (Россия, г. Новосибирск, 16 апреля 2012 г.)
Наука: Информационные технологии
Скачать книгу(-и): Часть I, Часть II, Часть III, Часть IV, Часть V
дипломов

МАТЕМАТИЧЕСКОЕ, ПРОГРАММНОЕ И МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ПОДСИСТЕМЫ ОПТИМИЗАЦИИ В СРЕДЕ SOLIDWORKS НА БАЗЕ API
Небайкина Юлия Алексеевна
студентка 4-го курса, кафедра ОТД МГУ им. Огарева Н. П., г .Рузаевка
E-mail: juliamichch@mail.ru
Чугунов Михаил Владимирович
научный руководитель, канд. техн. наук МГУ им. Огарева Н. П., г. Рузаевка
Современные требования, предъявляемые к математическому и программному обеспечению систем автоматизированного проектирования, являются весьма высокими, а уровень развития САПР по существу исключает возможность создания новых программных средств данного типа «с нуля». Данный факт связан с наличием у систем подобного рода развитых средств API (Application Program Interface). Так называют набор готовых классов, функций, структур и констант, предоставляемых приложением для использования его во внешних программных продуктах [2]. Поэтому актуальной является проблема создания приложений для САПР, расширяющих и дополняющих их штатный функционал без дублирования уже разработанных и доведенных до совершенства функций.
В данной работе рассматриваются вопросы разработки математического, программного и методического обеспечения приложения для SolidWorks, расширяющего базовый функционал SolidWorks в части решения задач оптимального проектирования. При этом оптимизационная задача в виде нелинейного математического программирования решается как серия (последовательность) оптимизационных задач с поэтапной заменой функций оптимизации упрощенными аналитическими зависимостями, построенными на основе идентификации объекта.
Идентификация объекта проектирования.
Для идентификации объекта широко используются методы регрессионного анализа. Эти методы предназначены для построения аналитических зависимостей, выражающих собой состояние и поведение объекта как функций от управляемых параметров на основе анализа серии экспериментов [3].
Построение таких зависимостей, адекватных во всей области поиска, определенной геометрическими ограничениями оптимизационной задачи, представляет собой, по существу, неразрешимую проблему. Поэтому целесообразно построить имитационную модель в отдельных подобластях пространства оптимизации, определенных движущимися границами на каждом этапе итерационного процесса. Таким образом, вместо исходной оптимизационной задачи имеем серию оптимизационных задач следующего вида [7]:
|
найти |
|
|
при ограничениях |
(1) |
|
|
|
x – вектор управляемых параметров, ![]() – аппроксимация целевой функции,
– аппроксимация целевой функции, ![]() и
и ![]() - аппроксимации функциональных ограничений соответственно равенств и неравенств, m – количество ограничений равенств, t – количество ограничений неравенств,
- аппроксимации функциональных ограничений соответственно равенств и неравенств, m – количество ограничений равенств, t – количество ограничений неравенств, ![]() и
и ![]() - геометрические ограничения соответственно снизу и сверху, n – размерность пространства оптимизации, индекс k соответствует номеру этапа оптимизационного процесса, N – количество этапов, необходимое для достижения заданной точности.
- геометрические ограничения соответственно снизу и сверху, n – размерность пространства оптимизации, индекс k соответствует номеру этапа оптимизационного процесса, N – количество этапов, необходимое для достижения заданной точности.
Рассмотрим один из наиболее важных вопросов, возникающих при идентификации объекта – вопрос выбора структуры аналитических выражений, используемых в качестве имитационных моделей (1). Отметим также, что эти выражения включают в себя свободные параметры ![]() , определяемые по результатам экспериментов, проведенных с детализированной моделью объекта в L точках, назначенных в пространстве Rn согласно некоторому плану экспериментов.
, определяемые по результатам экспериментов, проведенных с детализированной моделью объекта в L точках, назначенных в пространстве Rn согласно некоторому плану экспериментов.
Одним из методов определения свободных параметров является метод взвешенных наименьших квадратов. Метод заключается в минимизации по отношению к вектору a, где ![]() суммы
суммы ![]() квадратов отклонения в точках плана значений аппроксимирующих функций от значений, аппроксимируемых исходных функции, взятых с некоторыми сомножителями – весами:
квадратов отклонения в точках плана значений аппроксимирующих функций от значений, аппроксимируемых исходных функции, взятых с некоторыми сомножителями – весами:
|
|
|
здесь соответственно![]() и
и ![]() – исходные и модельные функции оптимизации в некоторой точке пространства проектирования
– исходные и модельные функции оптимизации в некоторой точке пространства проектирования ![]() , p – номер текущей точке в плане, P – суммарное количество таких точек,
, p – номер текущей точке в плане, P – суммарное количество таких точек, ![]() – весовой множитель, характеризующий собой относительный вклад информации от эксперимента, проведенного в p-той точке плана.
– весовой множитель, характеризующий собой относительный вклад информации от эксперимента, проведенного в p-той точке плана.
Как правило, исходные и модельные функции в некоторой подобласти должны быть близки друг к другу не только по своим значениям, но и по значениям частных производных. Сформулируем задачу нахождения вектора свободных параметров a, если наряду со значениями самих функций ![]() известны значения их частных производных (чувствительностей первого порядка):
известны значения их частных производных (чувствительностей первого порядка):
|
|
|
 .
.
В этом случае по параметрам ![]() минимизируется функция
минимизируется функция
|
|
|
 ,
,
где ![]() и
и ![]() – весовые коэффициенты, характеризующие относительный вклад информации о нормированных значениях
– весовые коэффициенты, характеризующие относительный вклад информации о нормированных значениях ![]() и
и ![]() соответственно в точке
соответственно в точке ![]() . Под экспериментом в данном случае понимается расчет конструкции, включающий анализ чувствительности, т.е. определение производных
. Под экспериментом в данном случае понимается расчет конструкции, включающий анализ чувствительности, т.е. определение производных ![]() .
.
Рассмотрим теперь более детально вопрос о выборе структуры регрессионного выражения ![]() . Наиболее простым частным случаем такой функции является линейная по параметрам
. Наиболее простым частным случаем такой функции является линейная по параметрам ![]() функция:
функция:
|
|
|

где ![]() - некоторые базовые функции.
- некоторые базовые функции.
Если известны результаты ![]() и
и ![]() ,
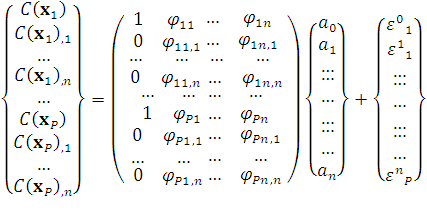
,![]() численных экспериментов, то задача построения имитационных моделей эквивалентна решению следующей системы уравнений:
численных экспериментов, то задача построения имитационных моделей эквивалентна решению следующей системы уравнений:
|
|
|
 ,
,
или
|
|
|
здесь ![]() – матрица из n+1 столбцов и P(n+1) строк,
– матрица из n+1 столбцов и P(n+1) строк, ![]() – вектор из P(n+1) компонент, содержащий значения аппроксимируемых функций и их производных в точках плана эксперимента. Использование взвешенного метода наименьших квадратов приводит к задаче минимизации суммы взвешенных квадратов значений вектора ошибок
– вектор из P(n+1) компонент, содержащий значения аппроксимируемых функций и их производных в точках плана эксперимента. Использование взвешенного метода наименьших квадратов приводит к задаче минимизации суммы взвешенных квадратов значений вектора ошибок ![]() , т.е.
, т.е.
|
|
|
где ![]() – диагональная матрица, содержащая веса
– диагональная матрица, содержащая веса ![]() .
.
Необходимым условием минимума является равенство нулю первых производных выражения ![]() по компонентам вектора a. Полученные уравнения образуют систему нормальных уравнений:
по компонентам вектора a. Полученные уравнения образуют систему нормальных уравнений:
|
|
|
Решением этой системы уравнений является искомый вектор свободных параметров![]() .
.
Описанная выше методика может быть обобщена на случай использования так называемых внутренне линейных аппроксимирующих функций. Эти функции не являются линейными, однако они могут быть приведены к линейным путем простых преобразований. Рассмотрим следующие примеры.
Мультипликативная функция.
|
|
|
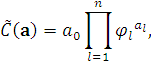
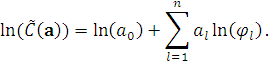
приводится к линейной путем логарифмирования
|
|
|
Аналогичным образом дело обстоит со степенной функцией
|
|
|
которая сводится к линейной преобразованием ![]() .
.
В простейшем случае весовые коэффициенты назначаются исходя из следующего критерия: весовой коэффициент, соответствующий i-той точке плана тем выше, чем ближе эта точка расположена к аппроксимируемой функции, а функции ![]() .
.
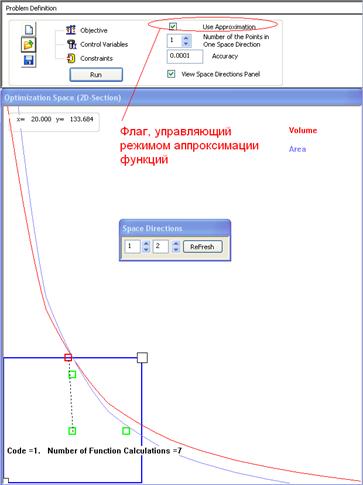
Разработанный нами программный комплекс может работать как в варианте решения оптимизационной задачи с использованием аппроксимаций, так и без таковых. Необходимый режим работы устанавливается флагом Use Approximation (рис. 1).
Методическое обеспечение [1] для данного приложения разработано в виде электронного учебного пособия.
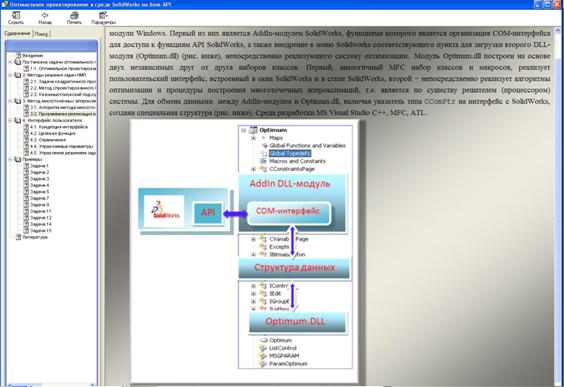
Учебное пособие представляет собой стандартную скомпилированную html-справку Windows (рис. 2) [2], включающую в себя панель инструментов и два окна: окно управления с вкладками «содержание» и «поиск», окно отображения содержания.
|
|
|
Рисунок 1.Назначение режима процедуры оптимизации |
Учебное пособие включает в себя следующие разделы.
Введение, в котором представлено систематизированное изложение основных понятий, связанных с технологиями автоматизированного и оптимального проектирования (рис. 3) и c системами автоматизированного проектирования.
|
|
|
Рис.2. Учебное пособие. Содержание и титульная страница. |
Разделы 1.1., 2.1–2.3 включают в себя изложение теоретических основ решения задач оптимального проектирования в виде нелинейного математического программирования (рис. 4).
В разделах 3.1–3.2 излагается концепция и программная реализация метода многоточечных аппроксимаций (рис. 5) [5, 6].
В разделах 4.1–4.5 излагается концепция и программная реализация интерфейса пользователя, включая определение целевой функции, ограничений, управляемых параметров и управление решением задачи в целом (рис. 6).
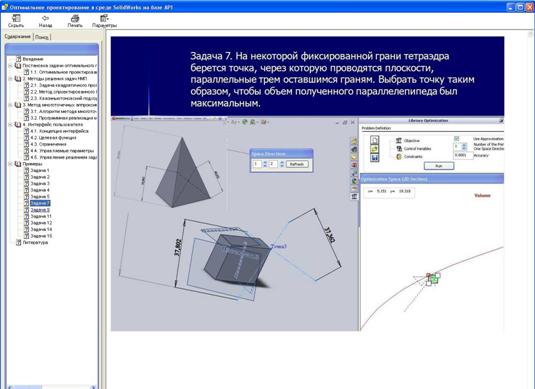
В разделе 5 представлены в качестве примеров решение задач, традиционно рассматриваемых в качестве тестовых в курсах оптимизации (рис. 7).
|
|
||
|
|
||
|
|
||
Рис.4. Учебное пособие. Постановка и методы решения задач оптимального проектирования.
|
|
||
|
|
|
||
|
Рис.5. Учебное пособие. Концепция и программная реализация метода многоточечных аппроксимаций.
|
|
||
|
|||
Рис.6. Учебное пособие. Концепция и реализация интерфейса пользователя
|
|||
|
|
|
||
|
|
|
||

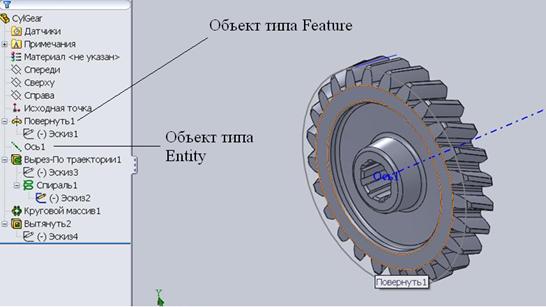
Чтение основные параметров из дерева конструирования модели SolidWorks [4]. Рассмотрим кратко процедуру чтения параметров для объекта «цилиндрическое зубчатое колесо» для операции вращения (рис. 8).
Основой модели является эскиз, который затем является объектом вращения вокруг некоторой оси. Параметры операции вращения являются элементами типа Feature (т.е. свойства), а параметры объектов эскиза рассматриваются как Entity (сущность).
В отношении объектов типа Feature это выглядит следующим образом:
pFeature->IGetDefinition(&iUnk);
res=iUnk->QueryInterface(IID_IRevolveFeatureData2,(LPVOID*)&RevolveData);
получение указателя RevolveData на данные операции вращения//
VARIANT_BOOL resultSel;
Получение типа оси вращения для операции и данных, определяющих ось
RevolveData->GetAxisType(&AxisType);
res=RevolveData->get_Axis(&pIDispAxis);
если ось является справочной геометрией, то
получение указателя на справочную ось.
res=pIDispAxis->QueryInterface(IID_IRefAxis,(LPVOID*)&pRefAxis);
if(pRefAxis==NULL || res != S_OK )
{throw(Exception("ref axis fail",__FILE__,__LINE__));}
VARIANT_BOOL retBool;
// получение параметров оси (координаты начальной и конечной точки //хранятся в массиве ParamRefAxis):
pRefAxis->IGetRefAxisParams(ParamRefAxis);.
В отношении объектов типа Entity:
// где создан эскиз
pSketch->GetReferenceEntity(&EntityType,&Retval);
// если эскиз создан на ссылочной плоскости
if(EntityType==swSelDATUMPLANES)
{
IRefPlane* pPlane;
Retval->QueryInterface(&pPlane);
pPlane->IGetRefPlaneParams(RefPlaneParams);
SketchPlacedOn=RefPlane;
}
если эскиз создан на ссылочной плоскости, то RefPlaneParams – массив, определяющий в пространстве положение ссылочной плоскости (направляющие косинусы нормали).
|
|
|
Рисунок 8. Дерево конструирования для модели «Зубчатое колесо»
|
Список литературы:
1. Небайкина Ю. А., Полунина И. Н., Чугунов М. В. Методическое обеспечение модуля OptimizationWorks. Машиностроение: наука, техника, образование: сб. научн. ер. YIII Всеросс. Научн .-практ. Конф., г. Саранск, 2010 г. – Саранск: Изд-во Мордов. Ун-та, 2010. с. 140–141.
2. Небайкина Ю. А., Полунина И. Н., Чугунов М. В. Оптимальное проектирование в среде SolidWorks на базе API. Учебное пособие. [Учебное текстовое электронное издание] – Саранск: Учебники Мордов. университета, 2011. – № 0321103251 – Режим доступа – URL: http://db.inforeg.ru/deposit/Catalog/mat.asp?id=288548
3. Небайкина Ю. А., Чугунов М. В. Математическое обеспечение модуля OptimizationWorks. Машиностроение: наука, техника, образование: сб. научн. ер. YIII Всеросс. научн.-практ. Конф., г Саранск, 2010 г. –Саранск: Изд-во Мордов. Ун-та, 2010. с. 145-148.
4. Небайкина Ю. А., Чугунов М. В. Программный модуль для решения задач оптимального проектирования в среде SolidWorks на базе API . Наука и образование: электронное научно- техническое издание// 2011, № 9, МГТУ им. Баумана Н. Э. [Электронный ресурс]. – Режим доступа – URL: http://technomag.edu.ru/doc/206217.html.
5. Небайкина Ю. А., Чугунов М. В., Щёкин А. В. Моделирование и оптимизация объектов машиностроения в среде SolidWorks на базе API. Технологии Microsoft в теории и практике программирования. Материалы конференции// Под ред. проф. Стронгина Р. Г. – Нижний Новгород: Изд-во ННГУ. 2010. с. 300–304.
6. Небайкина Ю. А., Чугунов М. В., Щёкин А. В. Программное обеспечение и пользовательский интерфейс модуля OptimizationWorks. Машиностроение: наука, техника, образование: сб. научн. ер. YIII Всеросс. научн.-практ. Конф., г. Саранск, 2010 г. – Саранск: Изд-во Мордов. Ун-та, 2010. с. 142–144.
7. Чугунов М. В. Оптимальное проектирование составных тонкостенных конструкций вращения. Саранск: Изд-во Мордов. университета, 2002. – с. 106.
дипломов