
Статья опубликована в рамках: XXXIX Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 24 февраля 2016 г.)
Наука: Технические науки
Секция: Транспортные коммуникации
Скачать книгу(-и): Сборник статей конференции
отправлен участнику
ИНТЕРВАЛЬНОЕ РЕГУЛИРОВАНИЕ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ

Система ГЛОНАСС обеспечивает масштабную оперативную навигацию для наземных и околоземных объектов на земле, на воде и в пределах атмосферного слоя Земли. Любой подвижной объект, использующий навигационную аппаратуру потребителя (НАП), имеет возможность в любой локации и временном промежутке определить точное положение и скорость движения объекта - это и есть глобальная оперативная навигация.
Применение и использование спутниковой навигации на базе ГЛОНАСС/GPS на железнодорожном транспорте крайне важно в наше время. Цели создания системы были направлены на повышение безопасности движения подвижного состава. Она может использоваться как на магистральном железнодорожном транспорте ОАО «РЖД», так и на предприятиях промышленного железнодорожного транспорта, у которого есть свой локомотивный парк и путевая инфраструктура. Система состоит из высокотехнологичного аппаратно-программного комплекса, которая в течение долгих лет предприимчиво и практично применяется для контроля и управления движения железнодорожным транспортом с высокоточной информацией о местонахождении, скорости и направлении движения поездов.
Система была создана для решения основных задач на железнодорожном транспорте:
- Определения местоположения, направления и скорости движения локомотивов в режиме реального времени.
- Обеспечения регулированием движения локомотивов на малодеятельных станциях и линиях, не оборудованных устройствами сигнализации, централизации и блокировки (СЦБ).
- Повышения безопасности движения поездов на железнодорожном транспорте.
- Понижения расходов, на содержание и эксплуатацию подвижного состава.
- Сокращения затрат на производство маневровых работ на железнодорожных станциях.
- Автоматизации и увеличения качества результативности управления движением поездов без использования влияния человека.
ГЛОНАСС/GPS отображает информацию диспетчерскому персоналу на автоматизированном рабочем месте дежурного по станции (АРМ ДСП). Диспетчерский персонал, осуществляющий регулирование движения поездов, благодаря системе ГЛОНАСС/GPS владеет информацией в режиме реального времени о номере пути следования, местоположении на пути в железнодорожной системе координат, скорости, направлении движения локомотива.
Система имеет две основные части: постовая аппаратура и бортовая аппаратура, которая устанавливается непосредственно в кабину машиниста.
Структура комплекса постовой аппаратуры показаны на рисунке 1.
Постовая аппаратура системы содержит следующие элементы:
- QNX - сервер системы;
- ЭВМ диспетчера;
- блоки аппаратуры удалённых постов.
 Рисунок 1 - Структура комплекса постовой аппаратуры
Рисунок 1 - Структура комплекса постовой аппаратуры
Постовая аппаратура функционирует и работает с приведенными ниже пунктами:
- ПРНС и датчики контроля параметров, собирают информацию и передают их на бортовую аппаратуру, которая установлена непосредственно на самом локомотиве для передачи данных на QNX.
- QNX – сервер получает информацию от блоков бортовой аппаратуры, которыми оборудован непосредственно сам локомотив и информацию от блоков аппаратуры удалённых постов, которые входят в состав ПРНС.
- QNX - сервер выполняет обработку данных в режиме реального времени, полученных от блоков бортовой аппаратуры и аппаратуры удалённых постов, определяет местоположение, направление и скорость движения локомотивов и записывает в базу данных (БД).
- ЭВМ диспетчера принимает по каналу Ethernet из БД информацию о местоположении, направлении и скорости движения локомотивов, а также информацию о случившихся событиях (начало движения локомотива, выход на перегон, въезд на станцию и конец движения локомотива). [1, стр. 42]
Блок бортовой аппаратуры оснащён на основе операционной системы реального времени (ОС РВ) QNX Neutrino и вычислительного модуля FASTWEL CPC304, исполненного в форм-факторе PC/104. Выбор в качестве вычислительного ядра модуля FASTWEL СРС304 объясняется оптимальным соотношением низкой цены и высокой производительности, большим диапазоном эксплуатации, а также использования операционной системы QNX. Достоинствами данного модуля являются пассивное охлаждение, наличие интерфейсов RS-232 и RS-485 и разъёма для подключения CompactFlash-карт.
Структура комплекса бортовой аппаратуры представлена на рисунке 2.
Состав ядра блока бортовой аппаратуры содержит:
- коммутационную плату с ПРНС, к которой вставляется электронный ключ и осуществляет функции аутентификация машиниста и оформляет запись в АРМ ДСП;
- плату расширения COM - портов;
- GSM - модем;
- блок питания.
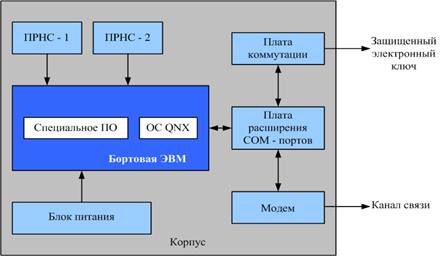
Рисунок 2 - Состав и структура бортовой аппаратуры системы
В окне программного обеспечения электронной вычислительной машины (ПО ЭВМ) диспетчера обозначается непосредственно станция, на которой указаны подвижные единицы, например, движущийся локомотив.
Вид окна ПО ЭВМ диспетчера представлен на рисунке 3.

Рисунок 3 - Вид окна программного обеспечения ЭВМ диспетчера
Таким образом, интеграция возможностей спутниковых технологий дает возможность расширения функций систем безопасности на основе централизованного ведения управления диагностикой и маршрутами. Это позволяет значительно сократить количество дорогостоящего перегонного оборудования за счет переноса функций обеспечения безопасности на локомотив и станции.
Список литературы:
- Гундаев И., Батраков А. Система управления движением локомотивов с использованием ГЛОНАСС / GPS // Современные технологии автоматизации. – 2012. – №3. – С. 40 – 44.
отправлен участнику