Статья опубликована в рамках: XXXII Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 26 мая 2015 г.)
Наука: Технические науки
Секция: Моделирование
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

МОДЕЛИРОВАНИЕ ТРАЕКТОРИЙ НАВЕДЕНИЯ РАКЕТ РАЗЛИЧНЫМИ МЕТОДАМИ
Клименко Владислав Николаевич
студент 3 курса, кафедра радиоэлектронных и телекоммуникационных систем ИРИТ-РТФ УрФУ, РФ, г. Екатеринбург
Е-mail: Vlad 55588@yandex.ru
Самусевич Галина Александровна
научный руководитель, доцент, канд. тех. наук, ИРИТ-РТФ УрФУ, РФ, г. Екатеринбург
В настоящее время широкое развитие вычислительной техники позволяет производить моделирование различных процессов в режиме реального времени.
Задача наведения ракеты на цель заключается в сближении ракеты с целью, то есть в совмещении их координат. Она решается с помощью различных методов наведения, определяющих требуемый закон движения ракеты. Наведение ракеты на цель решает сложный комплекс взаимосвязанных устройств. В него входит сама ракета с ее динамическими характеристиками, устройства, которые определяют положение ракеты и цели в пространстве, системы передачи информации и другие. Имеется большое разнообразие типов ракет, обусловленное различием типов целей (воздушные, наземные, морские), диапазоном их скоростей и особенностей тех ситуаций, в которых происходит преследование цели.
Процесс наведения ракеты на цель можно разделить на три основных этапа:
· Этап доставки ракеты в район расположения цели начинается с момента старта ракеты и продолжается до достижения ракетой заранее заданного расстояния до цели
· Этап наведения ракеты на цель
· Этап поражения цели, который начинается с некоторого расстояния (радиус мертвой зоны), когда отключается система управления и ракета летит по прямой. Минимальное расстояние до цели определяет промах ракеты.
Законы наведения ракеты на цель:
· Метод погони
При этом методе ракета всегда подходит к цели с хвоста независимо от направления скоростей ракеты и цели перед пуском.
Графический метод построения траектории представлен на Рис. 1. Обозначим точками Ц0 и Р0 положения цели и ракеты в момент начала самонаведения. Разобьем траекторию цели на отрезки. Соединим прямой линией точки Ц0 и Р0. Определив отрезок D1 проходимый ракетой за время t, отложим его на прямой Ц0Р0. Положение ракеты в момент времени t1 характеризует точка Р1. Соединим точки Ц1 и Р1, аналогично найдем точку точки Р2 и т. д. Соединив точки Р0, Р1, Р2,…получим кинематическую траекторию метода погони.

Рисунок 1. Траектория полета ракеты при методе погони
· Параллельное сближение
При наведении ракеты на цель по методу параллельного сближения требуемое значение угловой скорости линии ракета-цель равно нулю, т. е. φ=0.
Уравнение метода наведения выражается формулой ![]()
Графический метод построения траектории полета представлен на Рис. 2. Обозначим точками Ц0 и Р0 положения цели и ракеты в момент начала самонаведения. Разобьем траекторию цели на отрезки. Для построения кинематической траектории необходимо:
Из точек провести семейство прямых параллельных прямой Ц0Р0.
Вычислить отрезки пути, проходимые ракетой за интервалы времени
Для нахождения точки Р1 найти точку пересечения дуги радиусом D1 с центром в точке Р0 с прямой, проходящей через точку Ц1. Аналогичным образом строятся Р2, Р3, Р4, …
Соединив точки Р0, Р1, Р2…получим кинематическую траекторию метода погони.

Рисунок 2. Графическое построение траектории полета ракеты при методе параллельного сближения
· Метод пропорционального сближения
![]() Уравнение метода наведения выражается формулой
Уравнение метода наведения выражается формулой ![]() (Рис. 3.), где
(Рис. 3.), где
— угловая скорость поворота вектора скорости ракеты;
![]() — угловая скорость вращения линии ракета-цель;
— угловая скорость вращения линии ракета-цель;
k — коэффициент пропорциональности (навигационная постоянная);
ее величина изменяется в зависимости от направления атаки; при атаке точно навстречу цели она наибольшая, при атаке в заднюю полусферу — наименьшая; ее значение принимается равным нескольким единицам.
Для реализации метода пропорционального сближения необходимо в каждый момент времени измерять угловую скорость линии ракета-цель и сравнивать ее с угловой скоростью вращения вектора скорости ракеты.
Кинематическая траектория полета ракеты, наводимой на цель по методу пропорционального сближения, характеризуется уравнениями вида:

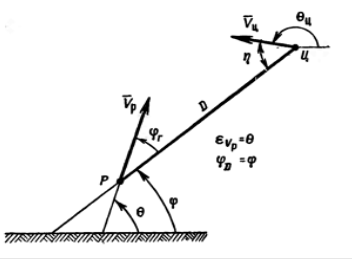
Рисунок 3. Взаимное положение ракеты и цели
· Метод упреждения
Этот метод позволяет уменьшить кривизну траектории и тем самым увеличить дальность и точность стрельбы.
Уравнения этого метода:

При задании параметра метода наведения постоянным нельзя уменьшить величину нормального ускорения ракеты для всех возможных параметров движения цели и координат точки встречи.
При отклонении условий стрельбы от заданных кинематическая траектория будет искривляться. (Рис. 4).
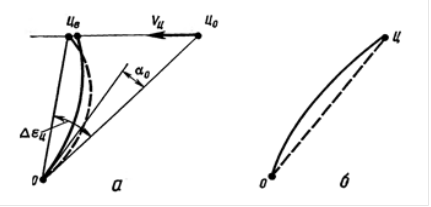
Рисунок 4. Вид траектории метода упреждения
Сложность исследования законов наведения заключается в наличии огромного числа параметров, которые влияют на траекторию ракеты и цели. Поэтому некоторые из них идеализируются, тем самым позволяя упростить задачу и выделить влияние оставшихся факторов на характер траектории. Далее будем считать возможным пренебречь влиянием ошибок определения ракеты и цели в пространстве, а также влиянием ошибок в каналах связи.
В данной работе была поставлена задача модернизации программного продукта, который моделирует траекторию наведения ракет на цель методами погони, постоянного угла упреждения и пропорциональной навигации, с визуальным отображением траекторий на экране монитора.
Задача модернизации заключается в следующем:
· разработать удобный для пользователя интерфейс, который поможет даже неподготовленному пользователю смоделировать наведение ракеты на цель
· Обеспечить наглядность и высокую точность расчетов
· позволить использовать программу в качестве лекционной демонстрации, пособия, или лабораторного практикума для изучения вопросов теории наведения ракет для студентов специальности «Радиоэлектронные системы и комплексы».
Программа написана на языке С с использованием алгоритмов численного интегрирования для решения дифференциальных уравнений, описывающих движение цели и ракеты для двух режимов полёта ракеты: кинематического (в соответствие с заданным законом наведения) и некинематического (движение с максимально возможной перегрузкой). Движение цели — прямолинейное, либо по окружности с постоянной нормальной перегрузкой.
Программа позволяет моделировать поведение цели и ракеты в зависимости от начальных параметров, таких как: скорость цели, скорость ракеты, расстояние по линии визирования, угол визирования, ошибка прицеливания, допустимая перегрузка ракеты, коэффициент пропорциональной навигации.
В случае, когда коэффициент пропорциональной навигации равен единице и при соответствующих начальных условиях реализуются законы наведения по кривой погони и с постоянным углом упреждения.
Список литературы:
1.Радиосистемы управления: учеб. для вузов / В.А. Вейцель, А.С. Волковский, С.А. Волковский и др. ; под ред. В.А. Вейцеля. М.: Дрофа, 2005. — 416 с.: ил. — (Высшее образование: Радиотехнические системы).
дипломов