
Статья опубликована в рамках: XXX Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 31 марта 2015 г.)
Наука: Технические науки
Секция: Металлургия
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
отправлен участнику

РАЗРАБОТКА УСОВЕРШЕНСТВОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГИДРОПРИВОДОМ ПЕРЕМЕЩЕНИЯ ЭЛЕКТРОДОВ СВЕРХМОЩНОЙ ЭЛЕКТРОДУГОВОЙ СТАЛЕПЛАВИЛЬНОЙ ПЕЧИ ДСП-250 (Г. ИСКЕНДЕРУН, ТУРЦИЯ) НА БАЗЕ АДАПТИВНОГО РЕГУЛЯТОРА АДМИТАНСА
Тулупов Платон Гарриевич
студент 4 курса, кафедра автоматизированного электропривода и мехатроники ФГБОУ МГТУ им. Г.И. Носова, РФ, г. Магнитогорск
E -mail: tulupov.pg@mail.ru
Николаев Александр Аркадьевич
научный руководитель, канд. техн. наук, доц., заведующий кафедрой АЭПиМ
ФГБОУ МГТУ им. Г.И. Носова, РФ, г. Магнитогорск
E -mail: alexniko@inbox.ru
Введение.
На данный момент в электросталеплавильной отрасли металлургии наблюдается тенденция замещения дуговых сталеплавильных печей (ДСП) малой и средней мощности сверхмощными ДСП. Это обусловлено тем, что сверхмощные печи, при одинаковой производительности, позволяют существенно снизить энергопотребление и уменьшить объём выбросов вредных веществ. Вследствие этого, особую актуальность приобретает задача оптимизации электрических процессов непосредственно сверхмощных ДСП.
В настоящее время на самой мощной в мире электродуговой сталеплавильной печи ДСП-250(ЗАО MMK Metalurji, г. Искендерун, Турция) используется система управления положением электродов HI-REG (Danieli, Италия). Структура регуляторов электрических параметров данной системы является закрытой, что создаёт определённые трудности для адаптации оборудования к изменяющимся производственным условиям без существенных материальных затрат и привлечения иностранных специалистов.
Важно отметить, что соответствие параметров регуляторов реальным параметрам объекта существенно влияет на общую энергоэффективность и экономичность установки [6]. В данной статье описан процесс разработки усовершенствованной системы управления положением электродов на базе адаптивного регулятора адмитанса. Новая система позволит осуществлять более гибкую настройку при меньших затратах.
1. Нелинейные статические характеристики объекта регулирования.
Электрический контур ДСП-250 удобно представлять в виде схемы замещения, представленной на рис. 1. Данная схема учитывает активно-индуктивное сопротивление питающей сети, короткой сети, печного трансформатора и реактора (приведённые ко вторичной обмотке). В некоторых случаях необходимо учитывать взаимоиндукцию M между фазами короткой сети, например, если короткая сеть не триангулирована.
Рисунок 1. Схема замещения трёхфазного электрического контура ДСП-250
Электрическая дуга представляется нелинейным дифференциальным уравнением мгновенной проводимости — уравнением Касси:
![]() . (1.1)
. (1.1)
Здесь ![]() — тепловая постоянная времени дуги, которая изменяется в течение плавки в пределах 0,2—5 мс;
— тепловая постоянная времени дуги, которая изменяется в течение плавки в пределах 0,2—5 мс;![]() — проводимость дуги,
— проводимость дуги,![]() — напряжение дуги;
— напряжение дуги; ![]() — противо-ЭДС дуги, где
— противо-ЭДС дуги, где ![]() — падение напряжения на анодно-катодной области электрода,
— падение напряжения на анодно-катодной области электрода, ![]() — градиент напряжения столба дуги,
— градиент напряжения столба дуги, ![]() — длина дуги.
— длина дуги.
В системе HI-REG в качестве параметра регулирования используется адмитанс фазы ![]() :
:
![]() . (1.2)
. (1.2)
Здесь ![]() — ток дуги,
— ток дуги, ![]() — фазное напряжение на вторичной обмотке трансформатора. Вследствие инерционных свойств объекта регулирования, а также наличия возмущающих воздействий в виде случайного изменения длины дуги, адмитанс фазы на протяжении плавки изменяется в соответствии с определёнными законами, которые достаточно трудно поддаются математическому описанию (рис. 2).
— фазное напряжение на вторичной обмотке трансформатора. Вследствие инерционных свойств объекта регулирования, а также наличия возмущающих воздействий в виде случайного изменения длины дуги, адмитанс фазы на протяжении плавки изменяется в соответствии с определёнными законами, которые достаточно трудно поддаются математическому описанию (рис. 2).
Если не учитывать инерционные свойства объекта, электрический контур может быть представлен статической характеристикой Y2ф(LARC), которая будет определяться параметрами элементов схемы замещения.
Рисунок 2. Изменение фактического значения адмитанса фазы ![]() в течение плавки
в течение плавки
Наиболее явное влияние на статическую характеристику оказывает изменение линейного напряжения вследствие переключения ступени печного трансформатора. На рис. 3.а приведена статическая характеристика для 10 ступени трансформатора и 6 ступени реактора ДСП-250, полученная на основании модели трёхфазного электрического контура ДСП-180 с гидроприводом перемещения электродов, разработанной в [2; 4]. Математическое моделирование производилось с учётом параметров схемы замещения, соответствующих реальным: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]() ,
, ![]() .
.
Исходя из данной характеристики, можно получить характеристику ![]() (рис. 3.б), где
(рис. 3.б), где ![]() — коэффициент усиления объекта регулирования, вычисляемый по формуле:
— коэффициент усиления объекта регулирования, вычисляемый по формуле:
![]() . (1.3)
. (1.3)
Для обеспечения качества переходных процессов на всем диапазоне регулирования, в структуру регулятора необходимо включить линеаризующую характеристику ![]() (рис. 3.в), компенсирующую коэффициент усиления
(рис. 3.в), компенсирующую коэффициент усиления ![]() . Коэффициент регулятора
. Коэффициент регулятора ![]() является обратной величиной для коэффициента KОР и может быть вычислен по формуле:
является обратной величиной для коэффициента KОР и может быть вычислен по формуле:
![]() . (1.4)
. (1.4)
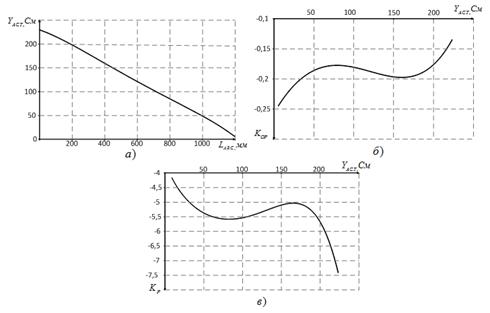
Рисунок 3. а) статическая характеристика ОР ![]() для
для![]() ,
,![]() ; б) Зависимость коэффициента усиления статической характеристики
; б) Зависимость коэффициента усиления статической характеристики ![]() ; в)Линеаризующая характеристика регулятора
; в)Линеаризующая характеристика регулятора
2. Нелинейные характеристики сервоклапанов гидропривода перемещения электродов.
Система гидравлического привода перемещения электродов ДСП-250, подробно описанная в [5], включает в себя три основные подсистемы: насосную станцию, гидроаккумуляторную станцию и гидроцилиндры с блоком сервоклапанов. В рамках данного исследования наибольший интерес представляет последняя подсистема, структурная схема которой представлена на рис. 4.
Рисунок 4. Структурная схема гидропривода перемещения электродов одной фазы ДСП-250
В данной подсистеме используется двухкаскадный сервоклапан фирмы MOOG модели D-665. Он позволяет изменять расход гидравлической жидкости Q, поступающей в поршневую полость гидроцилиндра, пропорционально сигналу задания ![]() , тем самым осуществляя регулирование скорости перемещения электрода. Идеальная характеристика
, тем самым осуществляя регулирование скорости перемещения электрода. Идеальная характеристика ![]() для данной модели сервоклапана, согласно технической документации, приведена на рис. 5.а.
для данной модели сервоклапана, согласно технической документации, приведена на рис. 5.а.
Данная характеристика является нелинейной, а также имеет мёртвую зону, величина которой составляет 2,5 % от максимального сигнала задания. Как показали ранее проведённые исследования [4], наличие мёртвой зоны в характеристике сервоклапана приводит к нарастающей с течением времени статической ошибке регулирования. Данная проблема решается внедрением в структуру регулятора компенсационной характеристики, представленной на рис. 5.б.
Также важно отметить, что зависимость ![]() в реальных производственных условиях существенно отличается от идеальной характеристики, что будет оказывать влияние на конечную зависимость скорости перемещения электрода
в реальных производственных условиях существенно отличается от идеальной характеристики, что будет оказывать влияние на конечную зависимость скорости перемещения электрода ![]() от
от ![]() . Данный факт подтвердился во время эксперимента на аналогичном гидравлическом оборудовании агрегата печь-ковш (АПК-1) ЭСПЦ ОАО MMK. На рис.6.а представлены зависимости
. Данный факт подтвердился во время эксперимента на аналогичном гидравлическом оборудовании агрегата печь-ковш (АПК-1) ЭСПЦ ОАО MMK. На рис.6.а представлены зависимости ![]() для фазы АПК-1.
для фазы АПК-1.
Рисунок 5. а) Идеальная характеристика Q (IELREF) сервоклапана MOOG D-665; б) Характеристика блока компенсации гидропривода перемещения электродов
На основании полученных данных, в новую систему управления положением электродов АПК-1 «РАДУГА ПК», разработанной специалистами ФГБОУ ВПО МГТУ, были внедрены линеаризующие характеристики, представленные на рис. 6.б.
Основным достоинством данного подхода к линеаризации по сравнению с традиционным подходом, представленным на рис. 5.б, является выравнивание скоростей перемещения электродов по фазам, а также приведение резульирующего коэффициента усиления сервоклапана ![]() вне зоны нечувствительности к 1, что позволит осуществлять регулирование скорости в соответствии с выражением:
вне зоны нечувствительности к 1, что позволит осуществлять регулирование скорости в соответствии с выражением:
![]() (2.1)
(2.1)
Рисунок 6. а) Реальные характеристики ![]() АПК-1 б)Реальные характеристики блока компенсации гидропривода перемещения электродв АПК-1
АПК-1 б)Реальные характеристики блока компенсации гидропривода перемещения электродв АПК-1
Поскольку характеристики сервоклапана изменяются с течением времени, данный способ линеаризации требует наличия возможности корректировки линеаризующей функции, что предусмотрено в системе «РАДУГА-ПК», но невозможно в системе HI-REG вследствие совмещения линеаризующей характеристики сервоклапана с линеаризующей характеристикой электрического контура.
3. Структура адаптивного регулятора адмитанса.
Как было сказано ранее, система управления HI-REG обладает рядом недостатков, а именно: необходимостью использования большого количества уникальных характеристик изменения коэффициентов регулятора, а также совмещением линеаризующих функций электрического контура и гидравлического привода.
Для упрощения процесса настройки регулятора предложена усовершенствованная структура адаптивного регулятора адмитанса (рис.7). Поскольку входной координатой данного регулятора является не ошибка регулирования ![]() , а реальная величина адмитанса
, а реальная величина адмитанса ![]() , число линеаризующих кривых электрического контура можно сократить до 16, в соответствии с числом ступеней печного трансформатора.
, число линеаризующих кривых электрического контура можно сократить до 16, в соответствии с числом ступеней печного трансформатора.
Также, в данном регуляторе блок компенсации нелинейной характеристики гидропривода является независимым, что позволяет задавать данную характеристику в соответствии с реальными параметрами сервоклапана.
Рисунок 7. Структурная схема усовершенствованного адаптивного регулятора адмитанса ДСП-250
Таким образом, результирующий коэффициент усиления регулятора может быть представлен как произведение четырёх составляющих: 1) ![]() — коэффициент линеаризующей характеристики сервоклапана; 2)
— коэффициент линеаризующей характеристики сервоклапана; 2) ![]() — коэффициент, учитывающий приведение сигнала к безразмерной величине, здесь
— коэффициент, учитывающий приведение сигнала к безразмерной величине, здесь ![]() — адмитанс задания; 3)
— адмитанс задания; 3) ![]() — коэффициент линеаризующей характеристики электрического контура ДСП; 4)
— коэффициент линеаризующей характеристики электрического контура ДСП; 4)  - коэффициент, учитывающий свойства гидропривода(KHD), блоков приведения единиц измерения(
- коэффициент, учитывающий свойства гидропривода(KHD), блоков приведения единиц измерения(![]() ), градиента напряжения дуговго столба (
), градиента напряжения дуговго столба (![]() ) и некомпенсируемых постоянных времени контура регулирования (
) и некомпенсируемых постоянных времени контура регулирования (![]() ).
).
Вывод.
Система управлением положением электродов HI-REG, установленная на ДСП-250, имеет ряд недостатков: 1) Большое количество уникальных характеристик регулятора; 2) Объединение линеаризующих характеристик электрического и гидравлического контура.
Наличие данных недостатков приводит к тому, что персонал ДСП-250 не имеет возможности производить оперативную настройку регулятора в соответствии с изменяющимися условиями эксплуатации оборудования. Вследствие этого, изменение параметров регулятора сопряжено с привлечением иностранных специалистов и существенными материальными затратами.
В рамках данной статьи, была разработана усовершенствованная структура адаптивного регулятора адмитанса, которая предоставляет возможность более гибкой настройки за счёт наглядности, уменьшения числа уникальных характеристик, разделения линеаризующих характеристик электрического и гидравлического контура.
Подобный подход к построению регулятора применялся специалистами Магнитогорского государственного технического университета совместно со специалистами ЗАО «КонсОМ СКС» (Магнитогорск) при проектировании АСУЭР «РАДУГА-ПК» на базе адаптивного регулятора импеданса.
Система «РАДУГА-ПК» была внедрена в качестве независимой резервной системы управления АПК-1 ЭСПЦ ОАО «MMK» и обеспечила работу установки с улучшенными показателями, что делает подход к построению регулятора, приведённый в статье, эффективным и актуальным как для агрегатов печь-ковш, так и для дуговых печей.
Список литературы:
1.Корнилов Г.П., Николаев А.А., Храмшин Т.Р, Вахитов Т.Ю. Анализ и оптимизация электрических режимов сверхмощных дуговых сталеплавильных печей // Электрометаллургия. — 2013. — № 7.
2.Николаев А.А., Тулупов П.Г. Исследование гидропривода перемещения электродов сверхмощной электродуговой сталеплавильной печи ДСП-250 ЗАО «ММК Metalurji», г. Искендерун, Турция // Энергетические и электротехнические системы. — 2014. —вып. 1.
3.Николаев А.А., Тулупов П.Г.. Особенности моделирования гидропривода перемещения электродов сверхмощной электродуговой сталеплавильной печи ДСП-180 // Инновации в науке . — 2013. — № 27.
4.Николаев А.А. Повышение эффективности работы статического тиристорного компенсатора сверхмощной дуговой сталеплавильной печи: автореферат дисс. канд. техн. наук, 2009. — 20 с.
5.Николаев А.А., Корнилов Г.П., Тулупов П.Г., Якимов И.А., Повелица Е.В., Ануфриев А.В. Разработка усовершенствованной системы автоматического управления положением электродов дуговых сталеплавильных печей и агрегатов печь-ковш // Электротехника: сетевой электронный научный журнал. — 2014. — том 1. [Электронный ресурс] — Режим доступа. — URL: http://electrical-engineering.ru/ (дата обращения 17.03.15).
6.Свенчанский А.Д. Автоматическое управление электротермическими установками. М.: Энергоатомиздат,1990. — 416 с.
отправлен участнику