Статья опубликована в рамках: XXIII-XXIV Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 18 сентября 2014 г.)
Наука: Технические науки
Секция: Космос, Авиация
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

АВТОМАТИЗАЦИЯ СТЕНДОВОГО ОБОРУДОВАНИЯ ПО ИСПЫТАНИЮ И РЕГУЛИРОВАНИЮ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ
Попельнюк Илья Александрович
студент 6 курса, факультет инженеров воздушного транспорта СГАУ, РФ, г. Самара
E -mail: osni204@yandex.ru
Злобина Юлия Петровна
студент 5 курса, факультет инженеров воздушного транспорта СГАУ, г. Самара
Гареев Альберт Минеасхатович
научный руководитель, канд. техн. наук, доцент, кафедра эксплуатации авиационной техники СГАУ, РФ, г. Самара
В связи с переходом на двухуровневую систему высшего образования в учебный процесс внедряются новые методы обучения, подразумевающие значительное увеличение доли интерактивных практических занятий, проведение которых требует наличия современного исследовательского и стендового оборудования. При этом лабораторно-техническая база должна охватывать области знаний авиационной и ракетно-космической техники: электрифицированные системы, гидравлически системы, высотное оборудование, системы кондиционирования воздуха, авиационные и ракетно-космические двигатели (системы, обеспечивающие их работу), элементы конструкции планера и т. д.
Подобный подход к выполнению студентами лабораторных и практических работ обеспечивает высокую эффективность усвоения материала за счёт работы на реальной технике.
Однако, для подготовки высококвалифицированных специалистов (как бакалавров, так и магистров) необходимо непрерывно поддерживать лабораторную базу на современном техническом уровне. Эта задача может быть решена за счёт, как создании новых лабораторных рабочих мест, так и модернизации имеющегося стендового оборудования с применением современных информационных технологий.
В настоящей статье рассмотрена методика модернизации лабораторно-стендового оборудования по испытанию и регулированию гидравлического привода КАУ-30Б с применением программируемого контроллера реального времени “Compact RIO” под управлением “Lab VIEW real time” компании National Instruments.
Комбинированный гидроусилитель КАУ-30Б применяется в системах управления вертолётами и предназначен для снятия нагрузок с командных рычагов управления. КАУ-30Б устанавливается в системах продольного, поперечного управления и управления общим шагом несущего винта.
Лабораторный стенд имеет свою гидросистему, систему питания электроэнергией, органы управления и средства измерения. При этом обеспечены следующие виды работ, согласно технологическим картам:
1. Проверка разности скоростей движения исполнительного штока при ручном управлении;
2. Регулирование исходного положения золотника ручного управления;
3. Проверка средней скорости движения исполнительного штока при ручном управлении;
4. Проверка зоны нечувствительности агрегата по золотнику ручного и комбинированного управления;
5. Проверка хода золотника ручного и комбинированного управления;
6. Проверка работы редукционного клапана.
Несмотря на техническую сложность и широкий спектр решаемых задач, при современном уровне развития технологий эффективность применения подобного стенда в учебном процессе неизбежно снижается. Это связано с отсутствием в работе современных автоматизированных средств сбора и обработки информации; устареванием элементной базы; отсутствием периодической метрологической поверки средств измерений; и, в конце концов, износом оборудования.
Вышеизложенные аспекты определяют актуальность модернизации стендового оборудования путём создания программно-аппаратного комплекса управления стендом (КУС). Общая структурная схема КУС представлена на рисунке 1.
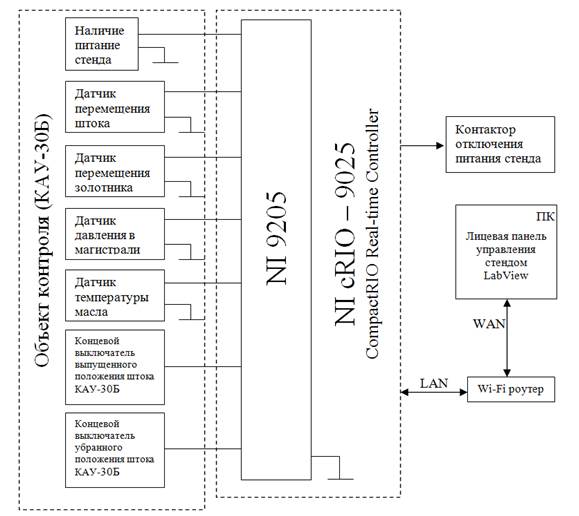
Рисунок 1. Структурная схема КУС
Программируемый контроллер NI Compact RIO представляет собой многофункциональную встраиваемую систему сбора данных и управления, разработанную для задач, требующих высокой производительности и надёжности измерительных и управляющих систем.
В качестве входной информации используется информация с датчиков на стенде, а так же информация о состоянии концевых выключателей крайних положений выходного вала КАУ-30Б.
Контроллер Compact RIO взаимодействует с персональным компьютером (ПК) под средством сетевого соединения [1]. При этом возможны следующие схемы:
1. Compact RIO-LAN-Wi-Fi роутер-WAN-ПК;
2. Compact RIO-LAN-ПК.
Первая схема применяется в случае удалённого взаимного расположения Compact RIO и ПК. Вторая схема не требует наличия Wi-Fi роутера и имеет более простые настройки.
Установка сетевого соединения выполняется средствами операционной системы ПК (Windows XP SP3, Windows Vista, Windows 7, Windows 8). С помощью утилиты MAX вводятся настройки сетевого подключения для контроллера: имя устройства, IP-адрес, DNS-сервер, шлюз и другие стандартные настройки (рисунок 2).
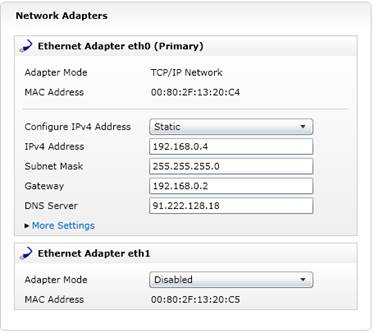
Рисунок 2. Настройки сетевого подключения NIc RIO-9025
В качестве модуля ввода/вывода информации применён модуль С-серии NI 9205, предназначенный для обработки аналоговой информации в диапазоне напряжений ![]() 10 В.
10 В.
NI 9205 представляет собой 32 канальный (для подключения несимметричных сигналов) / 16 канальный (для подключения дифференциальных сигналов) модуль аналогового ввода. Каждый канал аналогового ввода имеет AI терминал, к которому можно подключить устройство аналогового вывода. NI 9205 поддерживает составную частоту дискретизации 250 кГц, а также имеет возможность синхронизации. Каналы NI 9205 имеют общую земляную шину, изолированную от других модулей, включенных систему. Все каналы снабжены измерительным усилителем с программируемым усилением и мультиплексируются на вход аналого-цифрового преобразователя. Каждый канал также снабжен схемой защиты от перегрузок по напряжению свыше 30В.
Compact RIO получает информацию о состоянии гидросистемы, температурного режима и скоростных характеристиках штока гидроусилителя КАУ-30Б и передаёт её под средством сетевого соединения на персональный компьютер. Полученная информация обрабатывается программой, разработанной средствами Lab VIEW (Laboratory Virtual Instrumentation Engineering Workbench) — это среда разработки и платформа для выполнения программ, созданных на графическом языке программирования «G» [2]. Графический язык программирования «G» основан на архитектуре потоков данных, где последовательность выполнения операторов определяется не порядком их следования, а наличием данных на входах этих операторов. Операторы, не связанные по данным, выполняются параллельно в произвольном порядке. Фрагмент блок-диаграммы программы в режиме измерения времени выпуска и уборки исполнительного штока КАУ-30Б представлен на рисунке 3.
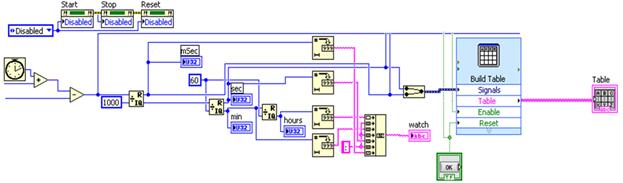
Рисунок 3. Фрагмент блок-диаграммы
Блок-диаграммы разных режимов работы КУС составлены в соответствии с разработанными алгоритмами. Для примера на рисунке 4 представлен алгоритм работы блок-диаграммы в режиме проверки разности скоростей движения исполнительного штока КАУ-30Б.
В данном режиме работы стенда производится проверка скоростей движения выходного исполнительного штока КАУ-30Б. В случае, если разность скоростей движения штока будет больше 15 % (от наибольшего значения скорости), то необходимо произвести регулирование исходного положения золотника ручного управления.
При работе стенда в этом режиме КУС автоматизирует процесс сбора и анализа и индикации информации о скоростях движения исполнительного штока.
При построении алгоритма применены следующие виды переменных:
1. S — Значение секундомера (натуральные числа);
2. out (n) — Измеренное значение времени выпуска штока КАУ-30Б (массив натуральных чисел из n элементов);
3. in (n) — Измеренное значение времени уборки штока КАУ-30Б (массив натуральных чисел из n элементов);
4. n — Счётчик циклов (целые числа);
5. К1 — состояние концевого выключателя убранного положения вала КАУ-30Б (логическая переменная: «1» — выключатель нажат, «2» — выключатель отпущен);
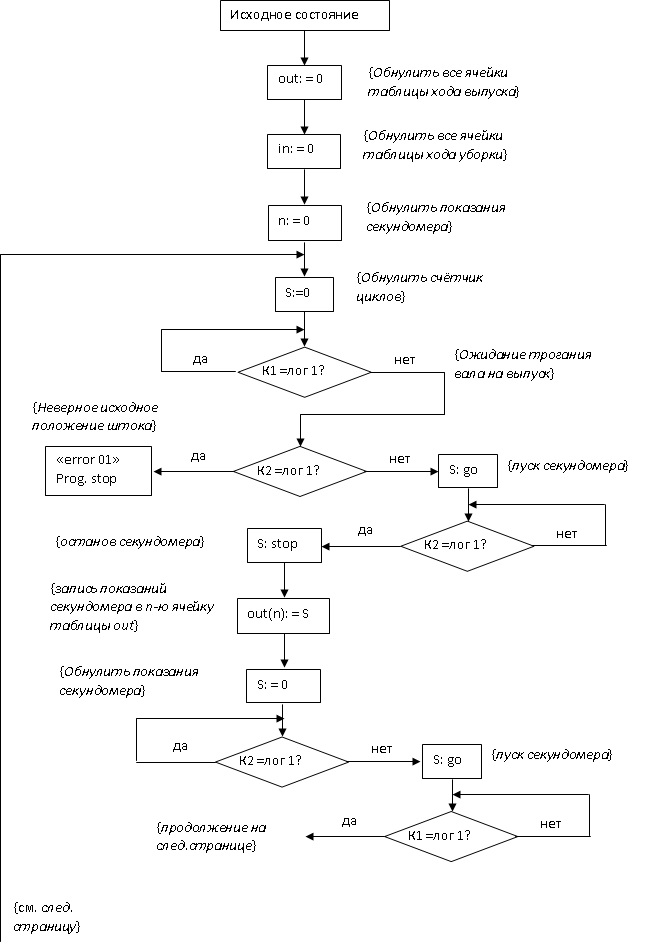

Рисунок 4. Алгоритм работы КУС
6. К2 — состояние концевого выключателя выпущенного положения вала КАУ-30Б (логическая переменная: «1» — выключатель нажат, «2» — выключатель отпущен);
7. dif — Разница между временем выпуска и временем уборки штока КАУ-30Б (натуральные числа);
8. ![]() — Относительная разница между временем выпуска и временем уборки штока КАУ-30Б (натуральные числа) — рассчитывается в отношении к минимальному из времён: выпуска или уборки.
— Относительная разница между временем выпуска и временем уборки штока КАУ-30Б (натуральные числа) — рассчитывается в отношении к минимальному из времён: выпуска или уборки.
В составе алгоритма заданы следующие условные команды:
go — пуск секундомера;
stop — остановка выполнения текущего действия;
error 01 — ошибка выполнения программы, заключающаяся в неверном исходном положении штока КАУ-30Б (в исходном положении шток должен быть убран).
Управление работой стенда и контроль его технического состояния осуществляется с помощью лицевой панели (рисунок 5). Лицевая панель содержит средства измерения, органы управления и контроля, а также область с методическими рекомендациями по выполнению работы.
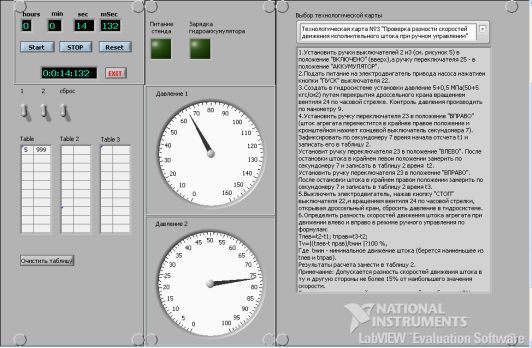
Рисунок 5. Панель управления
Для аварийного отключения стенда имеется управляемый контактор. Управление контактором осуществляется через усилитель (рисунок 1).
Массивы данных out (n) и in (n) имеют следующее распределение элементов на лицевой панели управления (рисунок 6).
|
Время выпуска |
Время уборки |
|
out 1 |
in 1 |
|
out 2 |
in 2 |
|
out 3 |
in 3 |
|
|
|
|
out n |
in n |
Рисунок 6. Распределение элементов в массивах “in” и “out”
Под циклом программы понимается ход штока КАУ-30Б на выпуск и на уборку. По завершению каждого цикла рассчитывается относительная разница между временем выпуска и временем уборки штока ![]() . В случае, если
. В случае, если ![]() больше 15 % выдаётся сообщение о необходимости регулировки исходного положения золотника ручного управления КАУ-30Б. В этом случае цикл программы повторяется. Если
больше 15 % выдаётся сообщение о необходимости регулировки исходного положения золотника ручного управления КАУ-30Б. В этом случае цикл программы повторяется. Если ![]() меньше 15 % — регулировка не требуется, работа считается завершённой.
меньше 15 % — регулировка не требуется, работа считается завершённой.
Таким образом, разработанная система управления стендом была успешно реализована и исследована в лаборатории ремонта летательных аппаратов и авиационных двигателей СГАУ с помощью средств современных технологий National Instruments [3].
В результате была достигнута возможность обеспечения автоматизированного мониторинга за процессом испытания гидропривода в режиме «реального» времени и предупреждения возникновения его отказа посредством выявления функциональных симптомов.
При выполнении подобных лабораторных работ студенты не только приобретают знания об устройстве и работе гидроусилителя КАУ-30Б, но и знакомятся с современными методами и технологиями сбора и обработки информации.
Список литературы:
1.Виноградова Н.А., Листратов Я.И., Свиридов Е.В. Разработка прикладного программного обеспечения в среде LabVIEW: учебное пособие. М.: Издательство МЭИ, 2005. — 50 с.
2.Евдокимов Ю.К., Линдваль В.Р., Щербаков Г.И. LabVIEW для радиоинженера: от виртуальной модели до реального прибора: практическое руководство для работы в программной среде LabVIEW. М.: ДМК Пресс, 2007. — 400 с.
3.Гареев А.М., Тимеркеев Р.Г. Автоматизированный измерительный комплекс по контролю чистоты рабочей жидкости // Авиационная промышленность М.:НИАТ — 2009. — № 4. — С. 62—68.
дипломов