Статья опубликована в рамках: XVI Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 21 января 2014 г.)
Наука: Технические науки
Секция: Машиностроение
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ЭНЕРГЕТИЧЕСКИЕ СООТНОШЕНИЯ В ИЗМЕРИТЕЛЬНОЙ АВТОКОЛЕБАТЕЛЬНОЙ СИСТЕМЕ ИНЕРЦИОМЕТРА
Гильманова Ирина Флюровна
студент 2 курса, кафедра технико-технологических дисциплин ВлГУ, РФ, г. Владимир
E-mail: ttd.tef@vlsu.ru
Шарыгин Лев Николаевич
научный руководитель, канд. техн. наук, профессор ВлГУ, РФ, г. Владимир
В студенческом конструкторском бюро «Хронос» при кафедре технико-технологических дисциплин ВлГУ выполнена разработка прибора для измерения моментов инерции деталей — инерциометра [2]. Схема измерительной автоколебательной системы представлена на рис. 1. На рис. 2 приведена схема формирования импульсов магнитоэлектрического привода (СФИП).
Измерительная автоколебательная система содержит колебательное звено в составе инерционной массы 3, назовем ее балансом, имеющей момент инерции относительно осевой линии I0, спиральную пружину 2 с линейной составляющей жесткости C. Измеряемая деталь в разработанной конструкции крепится на платформе 7, установленной на консольном хвостовике 1 конической формы. Для теоретического обоснования момент инерции платформы с элементами крепления измеряемой детали включим в значение I0. Компенсация потерь энергии в колебательном звене реализуется магнитоэлектрическим приводом, составленным из магнитной системы с магнитопроводами 3, на концах которых закреплены постоянные магниты 4. В зазорах магнитной системы размещены катушки освобождения W0 — 5 и привода Wи — 6. Величина подводимой энергии определяется СФИП.

Рисунок 1. Схема измерительной автоколебательной системы
Принцип измерения момента инерции детали Iи заключается в измерении периода колебаний Ти нагруженной измерительной системы с известными параметрами I0 и C из соотношения для консервативной системы
![]() = 2π
= 2π ![]() . (1)
. (1)
При движении баланса из одного крайнего положения (амплитуды) –А до другого крайнего положения +А на угле ![]() СФИП формирует подталкивающий импульс привода.
СФИП формирует подталкивающий импульс привода.
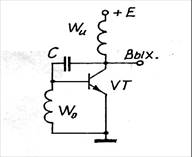
Рисунок 2. Электрическая принципиальная схема СФИП
Будем полагать, что момент вращения спиральной пружины подчиняется закону
Мпр = С (![]() 3) (2)
3) (2)
и суммарные потери энергии на трение (трение в подшипниках, трение о воздух, внутреннее трение в материале пружины) на ограниченном участке угла отклонения баланса ![]() можно отразить интегральным коэффициентом трения hи. При этих допущениях момент трения равен
можно отразить интегральным коэффициентом трения hи. При этих допущениях момент трения равен
Мтр = hи![]() (3)
(3)
Обозначим момент импульса передаваемый балансу при прямоугольной форме тока в катушке Wи , через Мио, а потери за счет наведенной ЭДС в этой катушке П![]() , тогда действующий момент привода будет
, тогда действующий момент привода будет
Ми = Мио - П![]() . (4)
. (4)
При прохождении по управляющей катушке W0 базового тока транзистора V![]() возникает тормозящий момент
возникает тормозящий момент
М0 = Р![]() . (5)
. (5)
Уравнение движения баланса получится в виде
(Iи + I0)![]() + С(
+ С(![]() 3) = Мио - П
3) = Мио - П![]() - Р
- Р![]() – hи
– hи![]() . (6)
. (6)
Перепишем в виде
![]() 2
2![]() =
= ![]() 2F(
2F(![]() ) , (7)
) , (7)
где ![]() ,
, ![]() =
= ![]() ,
, ![]() =
= ![]() .
.
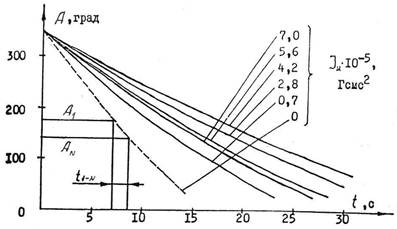
Рисунок 3. Графики огибающих амплитуд затухающих колебаний при различных Iи
Рассматриваемая измерительная автоколебательная система обладает сравнительно высокой добротностью и близка к линейной консервативной системе, следовательно, член F(![]() ) в уравнении (7) мал по сравнению с другими членами уравнения. Для решения уравнения (7) применим метод медленно меняющихся коэффициентов (метод линеаризации). Метод исходит из того, что линейная часть звена подавляет высшие гармоники (является фильтром низких частот), поэтому автоколебания в системе по этому методу рассматриваются в гармоническом виде, Учитывая, что Мпр, является нечетно-симметричной характеристикой, в разложении фурье отсутствует постоянная составляющая, Вторая приближенность метода заключается в отбрасывания высших гармоник.
) в уравнении (7) мал по сравнению с другими членами уравнения. Для решения уравнения (7) применим метод медленно меняющихся коэффициентов (метод линеаризации). Метод исходит из того, что линейная часть звена подавляет высшие гармоники (является фильтром низких частот), поэтому автоколебания в системе по этому методу рассматриваются в гармоническом виде, Учитывая, что Мпр, является нечетно-симметричной характеристикой, в разложении фурье отсутствует постоянная составляющая, Вторая приближенность метода заключается в отбрасывания высших гармоник.
В соответствии с принятым методом, решение уравнения (7) ищем в виде [1]
![]() = Аsin (
= Аsin (![]() ) ; (8)
) ; (8)
![]() ,
,
где А и ![]() — амплитуда и фаза медленно меняющихся функции времени, определяемые из выражений
— амплитуда и фаза медленно меняющихся функции времени, определяемые из выражений
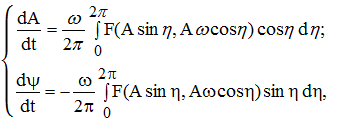 (9)
(9)
где ![]() .
.
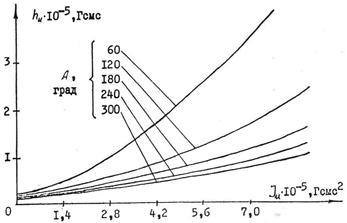
Рисунок 4. Зависимости интегрального коэффициента трения от измеряемого параметра
Переходя к вычислению интегралов (9) заметим, что моменты Мио, П![]() и Р
и Р![]() действуют в интервале угла
действуют в интервале угла ![]() , а момент трения hи
, а момент трения hи![]() — в интервале полного угла от –А до +А. Выполнив интегрирование получим
— в интервале полного угла от –А до +А. Выполнив интегрирование получим
 ; (10)
; (10)
 . (11)
. (11)
В формулах (10), (11) обозначено (в системе СГС)
Мио = ![]() i ; [Гсм] (12)
i ; [Гсм] (12)
П = ![]() ; [Гсм] (13)
; [Гсм] (13)
Р = ![]() , [Гсм] (14)
, [Гсм] (14)
где: Scр — эффективная площадь перекрытия катушки постоянными магнитами в интервале угла![]() ;
;
В — магнитная индукция в зазоре магнитной системы;
R0, Rи — активное электрическое сопротивление обмоток W0 и Wи;
С0,Си — толщины катушек W0 и Wи;
К3 — коэффициент заполнения обмоток;
Rвх , Rвых — входное и выходное сопротивления СФИП;
Iср — межцентровое расстояние ось вращения баланса — центр постоянных магнитов.

Рисунок 5. Построение амплитудной характеристики измерительной автоколебательной системы
В установившемся режиме автоколебаний
![]() (15)
(15)
отсюда получим уравнение баланса подводимой W+ и рассеиваемой W- энергии
W = WW- (16)
Подводимая энергия за период Т
W+ = 2Mио ![]() 2
2 (17)
(17)
Рассеиваемая энергия за период колебаний
W-=  (18)
(18)
Полагая
![]()
Получим
W- = 4hи d
d![]() (19)
(19)
Энергетические соотношения (15) в измерительной автоколебательной системе отражает амплитудная характеристика А = f (Iи).
Обратимся к графоаналитическому методу построения амплитудной характеристики, как наиболее наглядному. Для вычисления энергии потерь W- значения интегрального коэффициента трения hи вычислялись по графикам амплитуд затухающих колебаний баланса рис. 3 для колебательной системе I = 5,5 * 10-6 Гсмс2 и С = 0,0217 Гсм. Измерялось время колебаний баланса t1-N при уменьшении амплитуды от А1 до АN. При аппроксимации экспонентой
![]() =
= ![]() . (20)
. (20)
Построение амплитудной характеристики измерительной автоколебательной системы приведено на рис. 5.
С энергетической точки зрения рассматриваемая система может выполнять функции измерительного преобразователя в диапазоне амплитуд от Аmin = ![]() до Аmax = 360o –
до Аmax = 360o – ![]() .
.
Список литературы:
1.Пальтов И.П. Нелинейные методы исследования автоколебательных систем. Л.: Энергия, 1976. — 128 с.
2.Устройство для измерения моментов инерции тел. Патент RU863255, МПК G04С 3/00./А.А. Бугров, А.В. Поваров, Л.Н. Шарыгин. Опубл. 27. 08. 2009. Бюл. № 24.
дипломов