Статья опубликована в рамках: XII Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 03 октября 2013 г.)
Наука: Технические науки
Секция: Радиотехника, Электроника
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
отправлен участнику

ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ KОРРЕЛЯЦИОННОГО ПРИЁМНИКА
Кружилина Ольга Александровна
студент 4 курса факультета автоматизированных и информационных систем Гомельского государственного технического университета имени П.О. Сухого, г. Гомель, Республика Беларусь
E-mail: kruglaya1@mail.ru
Гарбуз Вячеслав Николаевич
научный руководитель, ассистент кафедры «Промышленная электроника», Гомельский государственный технический университет имени П.О. Сухого, г. Гомель
Целью исследования является определение характеристик корреляционного приёмника в условиях сильных помех теоретически и при помощи макетирования.
Задачами исследования являются: нахождение методики расчёта вероятности неприёма реальных устройств цифровой связи, в основу работы которых положен корреляционный способ приёма. Подтверждение найденных соотношений экспериментально.
Практическая значимость работы: методика расчёта вероятности неприёма позволит уточнять надёжность работы при проектировании новых и оценке существующих систем цифровой связи.
Актуальность тематики: при разработке систем цифровой связи, работающих с высокой надёжностью в канале с соотношением сигнал-шум около 1 и менее, экспериментальная проверка представляется очень сложной и затратной по времени задачей. Необходима методика расчета, которая позволит оценить надёжность реальной системы ещё на стадии проектирования, поэтому разработка такой методики представляется актуальной задачей.
Для правильной работы корреляционного приёмников условиях сильных шумов необходимо применять сигналы с хорошей автокорреляционной функцией (один резкий всплеск корреляционной функции), и плохой взаимной корреляцией с шумами в канале. На роль таких сигналов хорошо подходят так называемые М-последовательностями [5]. Данные сигналы обладают хорошими корреляционными свойствами, квазиортогональны, имеют большой ансамбль реализаций, формируются простыми устройствами [3, с. 172].
Автокорреляционный приём можно реализовать, например, по правилу:
![]() ; (1)
; (1)
где U1, U2,…, UL принятые из канала L двоичных символов, а S1, S2,…, SN – отсчёты известного сигнала, состоящего из N символов, k- предустановленный порог количества совпадений отсчётов принятого сигнала и эталонного.
Найдём вероятность неприёма для указанного способа декодирования. При вероятности рТ ошибочного приёма (в результате искажения шумами в канале связи) одного элемента М-последовательности, вероятность рi того, что в принятой последовательности из N символов будет ровно i ошибок, определится биноминальным законом распределения вероятностей [2, с. 236]:
рi = СNi piТ (1–pТ)N–i (2)
Тогда вероятность pn неприема сигнала синхронизации длиной N символов схемой с порогом срабатывания k определится с учётом того, что передаваемая последовательность будет не принята, если количество искажённых шумом отсчётов будет лежать в пределах от N-k-1 до N следующим образом:
 (3)
(3)
Шум, присутствующий на входе приёмника вместе с каждым отсчётом фазоманипулированного сигнала, может исказить этот символ, а может совпасть с ним, или иметь уровень недостаточный, чтобы исказить данный принимаемый символ. В зависимости от отношения мощности Рс /Рш сигнала и шума оценим вероятность искажения сигнала шумом, предполагая, что шум в канале имеет нормальное распределение вероятности появления уровней.
Вероятность рТ трансформации, искажения одного входного символа из-за шума, имеющего нормальное распределение вероятности появления уровней в момент анализа, можно определить с помощью интеграла вероятности ошибок [2, с. 655]:
 , (4)
, (4)
где
 — интеграл вероятности ошибок. (5)
— интеграл вероятности ошибок. (5)
Выражение для вероятности неприёма (3) получено в результате анализа корреляционного приёма (1). Однако реализуемые практически декодирующие устройства имеют более сложную структуру, с учётом которой соотношение (3) необходимо уточнить. Для согласования передаваемой М-последовательности и канала связи её подвергают модуляции на передающей стороне и демодуляции на приёмной. В реальных системах связи для передачи сообщений используется фазовая модуляция, модулируемым сигналом является синусоида, период следования которой равен периоду следования одного символа модулирующей М-последовательности (рисунок 1). Значения получаемого псевдослучайного сигнала FM в момент времени t можно получить по следующему правилу:
![]() ; (6)
; (6)
где: A — амплитуда псевдослучайного сигнала;
f — частота следования псевдослучайного сигнала, равная поднесущей частоте фазоманипулированного сигнала;
M — массив значений элементов М-последовательности.
Демодуляция на принимающей стороне заключается в следующем: если значение принятого отсчёта больше нуля, то принимается гипотеза о том, что в канале передавалась логическая «1», если значение принятого отсчёта меньше нуля, то принимается гипотеза, что в данный момент в канале передавался логический «0». Полученную таким образом за определённый период времени T цифровую последовательность подвергают дальнейшей обработке с помощью корреляторов.
Рисунок 1. Фрагмент временной диаграммы псевдослучайного сигнала M (t) и модулируемого им фазоманипулированного сигнала FM (t)
Уровни приходящего фазоманипулированного сигнала искажаются шумами по-разному. Очевидно, что маленькие уровни фазоманипулированного сигнала на участках с фазами около 0 и 180 градусов будут искажены шумом больше, чем уровни большие уровни сигнала на участках с фазами 90 и 270 градусов. При приёме моменты выборки отсчётов фазоманипулированного сигнала могут попасть на участки сигнала с фазами около 0 и 180 градусов, и принятые отсчёты сигнала будут сильно искажены. Чтобы повысить надёжность приёма, выборки отсчётов фазоманипулированного сигнала (рисунок 1) производят несколько раз за период следования псевдослучайного сигнала. Пусть в реализуемом практически устройстве выборки приходящего сигнала с последующей корреляцией осуществляются r раз за период следования одного элемента М-последовательности. Тогда неприём сигнала будет возможен только в том случае, если сигнал будет не принят ни одним из r параллельно работающих корреляторов. Вероятность этого события pnΣ определяется как:
![]() ; (7)
; (7)
где: pn1, pn2… pnr — вероятности неприёма соответственно 1,2…r-го корреляторов.
С учётом (3) совокупная вероятность неприёма для корреляционного способа в зависимости от количества корреляторов сигнала r и разности фаз между началом псевдослучайного сигнала и сигналом стробирования φ :
![]() (8)
(8)
где ![]() — зависимость уровня сигнал-шум (для i-го из r корреляторов) от количества корреляторов r, номера коррелятора i, и фазы начала выборки φ. Определим значение
— зависимость уровня сигнал-шум (для i-го из r корреляторов) от количества корреляторов r, номера коррелятора i, и фазы начала выборки φ. Определим значение ![]() . Анализируя приём фазоманипулированного сигнала, можно принять, что первый из r корреляторов принимает сигнал на участке (0;Dφ), второй — на участке (Dφ;2Dφ), i-ый коррелятор — на участке с фазой ((i-1)Dφ;iDφ). Тогда, с учётом того, что поднесущей фазоманипулированного сигнала является синусоида, для i-го коррелятора можно записать:
. Анализируя приём фазоманипулированного сигнала, можно принять, что первый из r корреляторов принимает сигнал на участке (0;Dφ), второй — на участке (Dφ;2Dφ), i-ый коррелятор — на участке с фазой ((i-1)Dφ;iDφ). Тогда, с учётом того, что поднесущей фазоманипулированного сигнала является синусоида, для i-го коррелятора можно записать:
 , (9)
, (9)
где: х — соотношение сигнал-шум для устройства,
![]() — значение мгновенной мощности поднесущей синусоиды для i-го коррелятора,
— значение мгновенной мощности поднесущей синусоиды для i-го коррелятора,
![]() — мощность сигнала для всего устройства. Значение фазы поднесущей синусоиды для i-го коррелятора рассчитывается как:
— мощность сигнала для всего устройства. Значение фазы поднесущей синусоиды для i-го коррелятора рассчитывается как:
![]() , (10)
, (10)
где: ![]() — фазовый сдвиг между началом фазоманипулированного сигнала и временем приёма отсчёта первым коррелятором.
— фазовый сдвиг между началом фазоманипулированного сигнала и временем приёма отсчёта первым коррелятором.
При исследовании характеристик приёмника необходимо также учесть, что для каждого значения r существует такая фаза входящего фазоманипулированного сигнала, для которой вероятность неприёма будет максимальной в силу того, что большинство отсчётов окажутся взяты из участков сигнала в окрестностях 0 и 180 градусов.
Для исследования надёжности корреляционного приёмника был разработан и реализован специализированный лабораторный стенд, позволяющий передавать цифровые сообщения. Структурная схема разработанного стенда приведена на рисунке 2. В состав стенда входят источники сигнала и шума с подключёнными к ним усилителями сигнала и шума с возможностью установки уровней соответствующих сигналов. Сигнал и шум складываются с помощью усилителя 3 и поступает на вход корреляционного устройства. Для автоматизации измерений в схему эксперимента введён контроллер эксперимента. К контроллеру эксперимента подключаются: признак окончания передачи сигнала от передатчика, сигнал с выхода микрофонного усилителя, признак подтверждения приёма коррелятором (сигнал «Пуск»). Контроллер эксперимента фиксирует значение отношения сигнал-шум на входе корреляционного приёмника при эксперименте, количество срабатываний и несрабатываний при эксперименте, обрабатывает результаты измерений и выдает их на жидкокристаллический дисплей, а также сохраняет результаты эксперимента в карту памяти ММС.
Передача шума в канале ведётся непрерывно, сигнал передаётся в течение одной секунды, затем следует временной перерыв также в течение одной секунды. Измерение значения отношения сигнала и шума происходит следующим образом: контроллер эксперимента с помощью АЦП фиксирует отсчёты смеси сигнала ys и шума yn с выхода усилителя 3 при передаче сигнала в течение T = 1 секунда, а затем отсчёты шума yn в течение 1-ой секунды во время перерыва между передачами сигнала. Искомое значение соотношения сигнал-шум х рассчитывается по формуле:
 ; (11)
; (11)
где No — число отсчётов, фиксируемых за время передачи сигнала.
Действительно, упрощая верхнюю часть выражения 12, получим:
![]()
Энергия сигнала равна:
 . (12)
. (12)
Энергия шума за время наблюдения:
 ; (13)
; (13)
Взаимная энергия сигнала и шума в силу их ортогональности равна нулю [1, с. 29]:
 . (14)
. (14)
С учётом соотношений (12)—(13) перепишем соотношение (11):
 .
.
Таким образом, измеряя за время передачи мощность смеси сигнала и шума и за время паузы мощность шума, можно находить соотношение сигнал-шум в канале x. После того, как значение сигнал-шум в канале установлено, контроллер эксперимента можно запускать для автоматической регистрации получаемых экспериментальных данных. В автоматическом режиме контроллер эксперимента фиксирует значение x, а также признак того, произошло ли срабатывание коррелятора. Если значение x входит в установленные пределы погрешности измерения соотношения сигнал-шум х, и во время передачи не было зафиксировано срабатывание корреляционного приёмника, то значение счётчика несрабатываний Nn увеличивается на единицу, и значение количества передач Nt увеличивается на единицу. Если значение x входит в установленные пределы погрешности измерения соотношения сигнал-шум х, и во время передачи было зафиксировано срабатывание корреляционного устройства, то только значение количества передач Nt увеличивается на единицу. Регистрация экспериментальных данных прекращается при достижении Nt значения 1000. Результат экспериментального исследования — вероятность несрабатывания pn корреляционного приёмника от соотношения сигнал-шум х на входе приёмника, рассчитывается по формуле:
![]() . (15)
. (15)
Если же во время эксперимента значение x вышло за установленные пределы погрешности измерения, результаты приёма сигнала корреляционным приёмником не учитываются при расчёте вероятности неприёма.
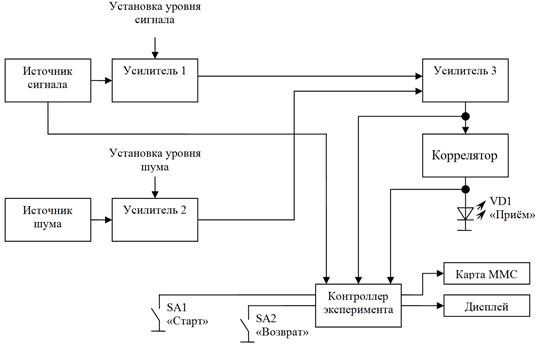
Рисунок 2. Структурная схема экспериментальной установки
Передатчик сообщений и источник помех расположены на одной макетной плате (рисунок 3). В состав передатчика входят: 1 — кнопка «Пуск» для начала передачи, 2 — формирователь фазоманипулированного сигнала, 3 — микропроцессор ATMega8-16PI, 5 — усилитель на микросхеме IL324N. Работает передатчик следующим образом: при нажатии на кнопку 1 «Пуск» микропроцессор 3 формирует псевдослучайную цифровую последовательность, которую формирователь 2 преобразует в фазоманипулированный сигнал. Полученный сигнал усиливается с помощью усилителя 4. Для передачи цифрового сообщения используется фазоманипулированный сигнал частотой 1кГц, модулируемый М-последовательностью длиной 1024 символа. Генератор помехи 4 (рисунок 3) также реализован на микроконтроллере ATMega8-16PI. Для постановки помехи в канале связи применяется М-последовательность с разрядностью 13 бит [4, с. 280]. При частоте следования символов «шумовой» М-последовательности 8191 Гц период её повторения составляет 1 секунда. Данный сигнал суммируется с фазоманипулированным сигналом и подаётся на макет приёмника.
Плата приёмника (рисунок 4) состоит из следующих функциональных блоков: усилителей 1, 2 и 3 на микросхемах IL324N, корреляционного приёмника 4, реализованного на микроконтроллере ATMega8-16PI, светодиода 6, сигнализирующего о приёме псевдослучайной последовательности. Для обновления микропрограммы контроллера на плате дополнительно помещён программатор 5.
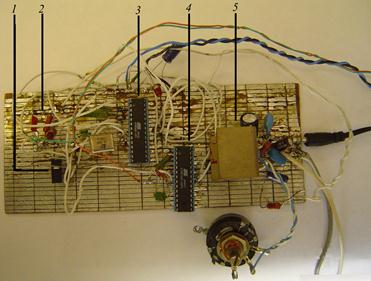
Рисунок 3. Макет платы передатчика фазоманипулированного сигнала

Рисунок 4. Макет платы корреляционного приёмника
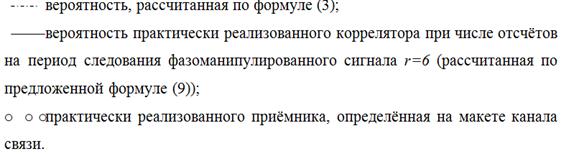
Обе платы подключаются к контроллеру эксперимента. Результаты экспериментального исследования корреляционного приёмника и теоретические расчёты вероятности неприёма приведены на рисунке 5.
Выводы: в результате рассмотрения особенностей работы реальных корреляционных приёмников предложена уточнённая формула для оценки вероятности неприёма. Правильность предложенного соотношения между параметрами приёмника и надёжностью его приёма была подтверждена испытаниями на макете канала связи.
Рисунок 5. Зависимость вероятности неприёма от соотношения сигнал шум:
Список литературы:
1.Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высшая школа, 1988.
2.Сигорский В.П. Математический аппарат инженера. Изд. 2-е, стереотип. Киев: Техника. 1977 — 768 с.
3.Тепляков И.М. и др. Радиолинии космических систем передачи информации. М., «Советское радио», 1975 — 218 с.
4.Хоровиц П., Хилл У. Искусство схемотехники. М.: Мир, 1998 — 698 с.
5.Шахтарин Б.И. и др. Синхронизация в радиосвязи и радионавигации: учебное пособие. М.: Гелиос АРВ, 2007.
отправлен участнику