Статья опубликована в рамках: IX Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 07 марта 2013 г.)
Наука: Технические науки
Секция: Машиностроение
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

К ВЫБОРУ МЕТОДИКИ РАСЧЕТА ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОПОРНО-ПОВОРОТНЫХ МЕХАНИЗМОВ АНТЕННЫХ УСТРОЙСТВ
Богорад Мирослава Сергеевна
студент, кафедра КТОМПС, Механико-Технологический факультет, Политехнический институт СФУ, г. Красноярск
E-mail: Miro4k@gmail.com
Лимаренко Герольд Николаевич
научный руководитель: д-р техн. наук, доцент, кафедра КТОМПС, Механико-Технологический факультет, Политехнический институт СФУ, г. Красноярск
Статья рассматривает методики расчета динамических характеристик, которые могут быть применены для расчета собственных частот и амплитуд вынужденных колебаний опорно-поворотных механизмов антенных устройств. Ключевые слова: антенное устройство, динамические характеристики, собственные частоты антенных устройств, амплитуды вынужденных колебаний.
Введение
Антенной называется радиотехническое устройство, предназначенное для излучения или приема электромагнитных волн. Антенна является одним из важнейших элементов любой радиотехнической системы, связанной с излучением или приемом радиоволн. К таким системам относят: системы передачи информации, системы извлечения информации, системы разрушения информации, системы радиоуправления.
Основной задачей современных антенных устройств (АУ) является обеспечение передачи сигнала высокого качества на требуемое расстояние. Поэтому направленность АУ является одной из ее важнейших характеристик.
Диаграмма направленности АУ зависит от конструкции антенны. Используя антенны с различными диаграммами направленности, можно повысить дальность и качество связи. Задание требуемого местоположения центрального лепестка зеркальных антенн осуществляется посредством электромеханических следящих систем.
Проблема, возникающая при создании зеркальных антенн, связана с необходимостью начальной реализации и последующего сохранения геометрической формы сооружения с отклонениями, не превышающими 1/16 длины волны, т. е. величин, измеряемых долями миллиметра. Превышение искажениями формы элементов ЗА указанного предела приводит к резкому снижению эффективности работы антенны [4].
Требование точности является одним из основных, предъявляемых к большинству механизмов антенн. От точности перемещения рабочих органов антенных систем (зеркала антенны, рупора сканера, зонда в измерительном устройстве и т. п.) зависит точность получаемых радиотехнических параметров. Использование различных радиотехнических способов, направленных на увеличение точности результатов, часто оказывается более сложным и дорогостоящим по сравнению с применением высокоточных передач [4]. Вибрации и слишком высокие амплитуды колебаний могут повлиять на точность наведения.
Динамические расчеты приводных систем
Расчётами и исследованием крутильно-поперечных колебаний в приводах занимались в научно-исследовательских институтах и КБ в Москве (ЭНИМС, ИМАШ), Ленинграде (Вульфсон И.И., Курков С.В.), Вильнюсе (Аугустайтис В.-К.В.) и др. Для получения уравнений движения при таких колебаниях используют уравнения Лагранжа II рода, в том числе и с неопределёнными множителями. В последнем случае получаются очень громоздкие выражения матриц жёсткости привода, что затрудняет вычисление собственных значений системы. В последнее время наиболее общим подходом в решении задачи анализа многомерных динамических систем является применение метода конечных элементов (МКЭ). Подобно тому, как исследуется напряженно-деформированное состояние упругих тел путем разбиения их твердотельных моделей на конечные элементы (сетки различного типа), так и систему привода можно исследовать аналогичным образом. При этом в качестве конечных элементов могут выступать как отдельные стержневые участки деталей привода, так и функциональные его части: передачи, муфты, валы в целом и др. [6].
Согласно пособию [5], для расчёта и анализа динамических характеристик привода составляется его расчётная схема — динамическая модель, в которой определённым образом взаимодействуют инерционно-массовые и упруго-демпфированные элементы. В программном комплексе “DYNAR” [8] для расчета и анализа крутильных колебаний приводов использован метод модального анализа, т. е метод разложения по собственным формам колебаний. Для этого математическую модель привода представляют в частотной форме. Используется также метод представления динамической системы механического привода, составленного из взаимодействующих конечных элементов-модулей, в которых моделируются как крутильные, так и поперечные колебания. В качестве функциональных элементов здесь используются модули:
В работе [5] приведены схемы и математические модели динамических модулей некоторых элементов механических приводов (двигателей, валов, зубчатых передач и др.).
На рис. 1 приведена двумерная динамическая модель двигателя при крутильных и поперечных колебаниях.
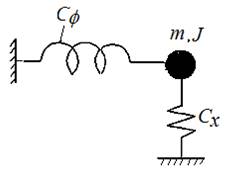
Рисунок 1. Двухмерная динамическая модель электродвигателя
Распределенная масса ротора приведена к сосредоточенной консольной массе ![]() . К этой массе приведена жесткость опор
. К этой массе приведена жесткость опор ![]() , а также соответствующий коэффициент демпфирования
, а также соответствующий коэффициент демпфирования ![]() . Приведенная радиальная жесткость
. Приведенная радиальная жесткость ![]() вычисляется как отношение допустимой радиальной консольной нагрузки к податливости приводного вала на консоли от единичной нагрузки:
вычисляется как отношение допустимой радиальной консольной нагрузки к податливости приводного вала на консоли от единичной нагрузки:
![]() , (1)
, (1)
Собственную частоту колебаний крутильной системы некоторых типов двигателей рассчитывают по формуле, Гц:
 , (2)
, (2)
где: ![]() — максимальный (критический) круктящий момент,
— максимальный (критический) круктящий момент,
![]() — число пар полюсов,
— число пар полюсов,
![]() — момент инерции ротора приведенный.
— момент инерции ротора приведенный.
В модели-модуле предполагается отсутствие упруго-демпфированной связи между крутильными и поперечными колебаниями ротора. Такая связь возникает лишь при взаимодействии ротора с элементом привода (муфта, ременная передача и др.).
Матрица инерции модуля электродвигателя может быть получена из выражения кинетической энергии системы:
 (3)
(3)
Матрица жесткости:
 , (4)
, (4)
Динамическую модель вала можно представить как систему с двумя упруго-демпфированными взаимодействующими массами ![]() , опирающимися на упруго-демпфированные опоры. Если в этой системе учесть также упругое взаимодействие инерционных масс при кручении, то получим динамический модуль вала с четырьмя обобщенными координатами, который можно использовать при моделировании систем приводов, как конечный элемент вала (КЭ) (Рис. 2).
, опирающимися на упруго-демпфированные опоры. Если в этой системе учесть также упругое взаимодействие инерционных масс при кручении, то получим динамический модуль вала с четырьмя обобщенными координатами, который можно использовать при моделировании систем приводов, как конечный элемент вала (КЭ) (Рис. 2).
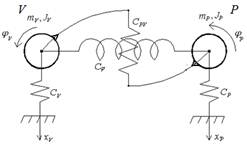
Рисунок 2. Динамический модуль вала с четырьмя степенями свободы
Результирующая матрица жесткости КЭ вала имеет вид:
 (5)
(5)
Инерционная матрица:
 , (6)
, (6)
где: h — распределенный момент инерции вала при кручении.
Динамическую модель всего привода получают путем ансамблирования конечно-элементных модулей.
В пособии [2] разработка математической модели привода главного движения состоит из следующих этапов:
1. Анализ разработанной конструкции привода главного движения и определение его параметров по сборочным чертежам, построение расчетной схемы динамической системы привода.
2. Описание расчетной схемы привода системой дифференциальных уравнений.
3. Определение передаточных функций динамической системы привода главного движения.
4. Построение частотных и переходных частотных характеристик привода.
5. Анализ динамического качества привода главного движения по его динамическим характеристикам.
Далее производится расчет податливостей элементов привода.
Полученная в результате подсчета моментов инерции сосредоточенных масс приводных механизмов и податливостей упругих участков между ними расчетная схема представляет собой цепную систему весьма громоздкую, так как валы вращаются с разными скоростями и соединяются между собой посредством передач.
Особенности данного метода:
· Использование громоздких уравнений Лагранжа второго рода.
· В данной методике не упомянуто использование средств автоматизации, инженерных программ.
· Основное внимание уделяется крутильным колебаниям.
Зависимость диаграммы направленности от вибраций рассмотрена в работе [7]:
При механических гармонических воздействиях с начальной фазой равной нулю, через один интервал дискретизации по времени ∆t, равный времени прохождения механической волной расстояния от края антенны до ее центра, возникающая деформация профиля антенны приводит к следующим изменениям ДН (см. рис. 3, кривая 2): ширина ДН изменяется незначительно, но уже исчезают нулевые уровни в области боковых лепестков и изменяется уровень боковых лепестков. При исследовании результатов деформации для каждого следующего временного интервала ∆t воздействие поперечных механических колебаний оценивалось для нового пространственного положения щелей профиля антенны полученного в предыдущий момент.
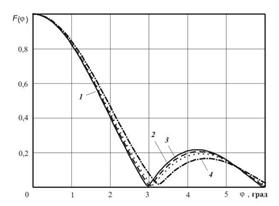
Рисунок 3. Изменение диаграммы направленности антенны вследствие деформации, образующейся из-за вибраций
Расчеты деформации профиля антенны для моментов времени t, соответствующих его дальнейшему приращению с интервалом ∆t дали следующие результаты. При t= 2∆t (см. рис. 3, кривая 3) и t=3∆t (см. рис. 3, кривая 4), т. е. с увеличением t, наблюдается увеличение деформации профиля антенны и изменение ДН.
Из этого можно заключить о важности расчета и минимизации колебательных характеристик для антенных устройств.
Подробно рассматривает расчет динамических характеристик шпинделя работа [1], разрабатывая методический подход для многокритериального выбора наиболее рациональных конструктивных и рабочих параметров. Рассматривая конструкции шпиндельных узлов как двухконсольную балку на упругих опорах, нагруженную сосредоточенными и распределенными массами. Данный подход недостаточен для задачи определения динамических характеристик привода антенных устройств.
Модальный анализ так же используется в статье [9]. Расчеты производятся в программном комплексе Ansys, в результате чего получены некоторые характеристики шпинделя при вращении на критической скорости. В результате получены собственные частоты для различных ситуаций. Однако, в данной работе не производится расчет амплитуд колебаний шпинделя.
В работе [6] приведен метод расчета амплитуд вынужденных колебаний элементов механической системы привода тяжелого станка. Этот метод основан на использовании частотных передаточных функций привода и его модальном анализе.
Выводы
Рассмотрев указанные выше работы, можно заключить, что наиболее подробно расчет динамических характеристик механических систем рассмотрен в методиках [2] и [5]. Однако, метод, представленный в учебном пособии [5] более эффективен по нескольким причинам:
· использование методов конечных элементов и модального анализа
· разбиение на модули.
· расчет как крутильных, так и поперечных колебаний.
· использование различных программных продуктов.
Список литературы:
1.Басинюк В.Л., Кулешова А.В. Расчет динамических характеристик и многокритериальный выбор параметров шпиндельных узлов, Минск — Issn 1995-0470. Механика машин, механизмов и материалов. № 4 (17). 2011. — с. 29.
2.Басинюк В.Л., Кулешова А.В. Расчет динамических характеристик металлорежущих станков: учебное пособие, Тамбов, Издательство ТГТУ, 2007 г.
3.Диняева Н.С. Конструирование механизмов антенн, Москва, Издательство МАИ, 2002 г. — с. 62
4.Кузнецов В.В. и коллектив авторов Справочник «Металлические конструкции», Москва, издательство АСВ, 1999 г
5.Лимаренко Г.Н. Динамика, вибродиагностика и виброзащита машин: учеб.-метод. пособие [для ст-в спец.230104»САПР»] Красноярск: СФУ, 2012. — 96 с.
6.Лимаренко Г.Н. Методология проектирования реечных передач с автоматизированным приводом. Монография, Сиб. федерал. ун-т. — Красноярск. ИПК СФУ, 2010. — 362 с.
7.Талибов Н.А. Якимов А.Н., Смогунов В.В. Исследование влияния вибраций на диаграмму направленности волноводно-щелевой антенны Пензенский Гос-й унив-т (г. Пенза) — Материалы III Всероссийской конференции «Радиолокация и радиосвязь» — ИРЭ РАН, 26-30.10.09 [Электронный ресурс] — Режим доступа — URL: http://jre.cplire.ru/jre/library/3conference/pdffiles/a017.pdf (дата обращения 27.01.13).
8.Хомяков В.С. Автоматизированная система расчета статических и динамических характеристик крутильных систем приводов / В.С. Хомяков и др. — М: Мосстанкин 1990. — 28 с.
9.Abuthakeer S.S. Mohanram P.V., Mohan Kumar G. Dynamic characteristics analysis of high speed motorized spindle. Annals of faculty engineering hunedoara — international journal of engineering Tome IX (2011). India. Fascicule 2. ISS№ 1584. — 2665 pp. 219—224.
дипломов