Статья опубликована в рамках: III Международной научно-практической конференции «Научное сообщество студентов: МЕЖДИСЦИПЛИНАРНЫЕ ИССЛЕДОВАНИЯ» (Россия, г. Новосибирск, 23 мая 2012 г.)
Наука: Технические науки
Секция: Технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

УРАВНЕНИЯ ДВИЖЕНИЯ ДЕТАЛИ НА ЭТАПЕ УГЛОВОЙ АДАПТАЦИИ
Маштаков Максим Валерьевич
Сарайкина Ольга Андреевна
студенты 4 курса, кафедра Приборостроение Федерального государственного бюджетного общеобразовательного учреждения высшего профессионального образования «Ковровская государственная технологическая академия имени В. А. Дегтярева», г. Ковров
E-mail: Mac7@list.ru
Кабаева Ольга Николаевна
научный руководитель,канд. техн. наук, доцент кафедры Приборостроение Федерального государственного бюджетного общеобразовательного учреждения высшего профессионального образования «Ковровская государственная технологическая академия имени В. А. Дегтярева», г. Ковров
Рассмотрим движение детали в процессе адаптации ее углового положения.
Рис. № 1 Начальное положение детали
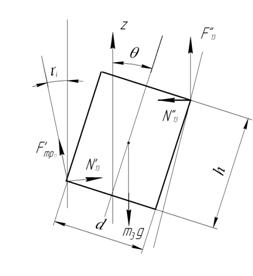
Исходное положение детали определяется расположением перемещающих элементов в момент завершения прямого хода рабочего органа (фаза однополостного гиперболоида [1, с. 68] с наименьшим горловым сечением) (рис.1). Поскольку поверхность однополостного гиперболоида образована перемещающими элементами, повернутыми на максимальные радиальный а и тангенциальный ![]() углы, их контакт с цилиндрической поверхностью детали возможен в точках пересечения перемещающих элементов с образующими цилиндрической поверхности. Эти точки (к1, к2, к3, кп) располагаются на окружности уровня l. Поскольку сечение детали плоскостью, проходящей через окружность уровня, представляет собой эллипс с большой осью, равной диаметру окружности уровня и малой осью, равной диаметру детали, из всех возможных точек контакта остаются две, наиболее близко расположенных к большой оси эллипса. Рассмотрим сечение детали, проходящее через ось симметрии и большую ось эллипса (рис.2). На деталь 3 действуют [1, с. 72], [2, с. 35]:
углы, их контакт с цилиндрической поверхностью детали возможен в точках пересечения перемещающих элементов с образующими цилиндрической поверхности. Эти точки (к1, к2, к3, кп) располагаются на окружности уровня l. Поскольку сечение детали плоскостью, проходящей через окружность уровня, представляет собой эллипс с большой осью, равной диаметру окружности уровня и малой осью, равной диаметру детали, из всех возможных точек контакта остаются две, наиболее близко расположенных к большой оси эллипса. Рассмотрим сечение детали, проходящее через ось симметрии и большую ось эллипса (рис.2). На деталь 3 действуют [1, с. 72], [2, с. 35]:
 - сила тяжести m3g;
- сила тяжести m3g;
- силы реакции в точках контакта с перемещающими элементами и ;![]()
- силы сухого трения в точках контакта ![]() и
и ![]() .
.
Положение детали определяется углом между ее осью и осью z - осью симметрии устройства. Положение перемещающих элементов в рассматриваемом сечении задается углом. Значение этого угла для i-го перемещающего элемента:

. (1)
Для двух точек контакта i1=1, i2=(n-1)/2.
Значения нормальных сил реакции можно найти из уравнений статического равновесия детали (2), (3).

 (2)
(2)
где h,d- высота и диаметр присоединяемой детали;
f – коэффициент трения.

(3) При движении устройства за счет обратного хода рабочего органа происходит изменение угла от максимального значения до 0. При этом изменяются вектора сил реакции и сил трения (рис.2.).

В первом приближении можно считать моменты сил трения относительно центра масс детали равными и противоположно направленными. Момент сил и направлен против часовой стрелки и стремится повернуть в сторону уменьшения угла . Считая углы ![]() и
и ![]() равными по модулю
равными по модулю ![]() , запишем выражение для движущего момента в плоскости продольного сечения детали:
, запишем выражение для движущего момента в плоскости продольного сечения детали:
 (4)
(4)
Приравнивая движущий момент сумме моментов сопротивления – инерционного ![]() и диссипативного
и диссипативного ![]() , получим уравнение движения детали.
, получим уравнение движения детали.
 (5)
(5)
где ![]() - экваториальный момент инерции детали;
- экваториальный момент инерции детали;
![]() - приведенный коэффициент вязкого трения в зоне контакта детали с перемещающими элементами.
- приведенный коэффициент вязкого трения в зоне контакта детали с перемещающими элементами.
В процессе движения возможно отклонение детали в продольной плоскости, перпендикулярной рассматриваемому сечению. Характер взаимодействия детали и перемещающих элементов при этом сохраняется. Число точек контакта при этом равно 4. В процессе угловой адаптации происходит также поступательное перемещение детали под действием силы тяжести вдоль оси Z.
Уравнение движения по этой координате без учета сил вязкого трения (только при наличии сухого трения в точках контакта детали и перемещающих элементов) будет иметь вид:
![]() (6)
(6)
При ![]() , что имеет место при обратном ходе рабочего органа, движущая сила в правой части уравнения (5) возрастает.
, что имеет место при обратном ходе рабочего органа, движущая сила в правой части уравнения (5) возрастает.
Таким образом, в продольной плоскости устройства деталь совершает плоское движение, включающее поступательное перемещение центра масс детали вдоль оси Z и вращение детали вокруг центра масс на угол.
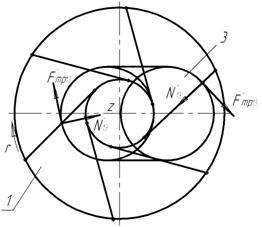
Движение перемещающих элементов при обратном ходе рабочего органа создает вращающий момент в экваториальной плоскости детали. На рисунке 4 показано, что на деталь 3 в точках контакта действуют силы реакции N13 и силы трения Fтр13. При движении перемещающих элементов по часовой стрелке при неподвижном нижнем основании проекции сил трения в поперечном сечении будут создавать крутящий момент, стремящийся повернуть деталь вокруг оси Z в направлении движения верхнего основания (по часовой стрелке). Величина этого момента будет равна:
 (7)
(7)
где d, h- линейные размеры детали;
f – коэффициент трения;
- угол наклона детали в продольной плоскости;
![]() ;
;
![]() ;
;
S – перемещение верхнего основания;
а – длина перемещающего элемента.

При отсутствии скольжения между деталью и перемещающими элементами произойдет поворот продольной плоскости детали, проходящей через точки контакта на угол в направлении движения верхнего основания.
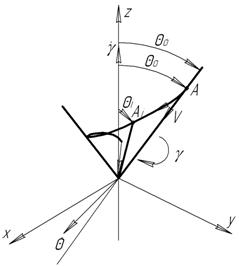
С учетом рассмотренных уравнений движения детали на этапе угловой адаптации при обратном ходе рабочего органа, схема движения детали принимает вид (рис.5). деталь участвует в трех движениях:
- вращение вокруг центра системы координат
 . При этом угол между осью симметрии детали и вертикальной осью OZ изменяется от
. При этом угол между осью симметрии детали и вертикальной осью OZ изменяется от  до
до  , при скорости
, при скорости  ;
; - вращение детали вокруг вертикальной оси OZ на угол (угловая скорость
 );
); - поступательное перемещение детали вдоль оси симметрии под давлением силы тяжести (линейная скорость V ).
В результате центр масс детали А будет перемещаться по траектории, близкой к спирали с переменным шагом. Значительный участок траектории представляет собой прямую линию. Позиционирование детали в радиальном и угловом направлениях с сохранением подвижности в осевом направлении обеспечивается на последнем участке возникновением контакта детали практически со всеми перемещающими элементами при равенстве диаметра горлового сечения диаметру детали. Уточнение вида и параметров траектории движения может быть получено в результате решения уравнений движения
Список литературы:
1.Кабаева О. Н. Разработка метода пассивной адаптации для автоматизированной сборки осесимметричных деталей // Материалы I научно-технической конференции аспирантов и молодых ученых: Сборник статей.- Ковров: КГТА, 2006. – с. 67 – 75.
2.Симаков А. Л. Обоснование методов и средств адаптации соединяемых деталей на базе принципов автоматического управления и выявления взаимосвязей при автоматизированной сборке / дисс. на соиск. уч. ст. д.техн. н. – Ковров: 2002 г.
дипломов