Статья опубликована в рамках: XXVII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 30 октября 2013 г.)
Наука: Технические науки
Секция: Машиностроение и машиноведение
Скачать книгу(-и): Сборник статей конференции, Сборник статей конференции часть II
- Условия публикаций
- Все статьи конференции
дипломов

РЕШЕНИЕ КОНТАКТНЫХ ЗАДАЧ ТЕОРИИ УПРУГОСТИ С ПОМОЩЬЮ АЛЬТЕРНИРУЮЩЕГО МЕТОДА ШВАРЦА
Яковлев Максим Евгеньевич
аспирант, ассистент кафедры ФН-2, МГТУ им. Н.Э. Баумана, г. Москва
E-mail: me-yakovlev@rambler.ru
SOLUTION OF CONTACT PROBLEM OF ELASTICITY BY SCHWARZ ALTERNATING METHOD
Maxim Yakovlev
graduate student, assistant, Moscow State Technical University, Moscow
Аннотация
В работе рассмотрены особенности алгоритма численного решения контактных задач механики деформируемого твёрдого тела в сложных двухмерных областях. Решение построено в рамках конечно-элементной технологии на основе альтернирующего метода Шварца. Метод состоит в попеременном выполнении на контактной поверхности силовых и кинематических граничных условий. Проведён анализ напряжённо-деформированного состояния замкового соединения.
ABSTRACT
The paper discusses the features of the algorithm of numerical solution of contact problems of solid mechanics in complex two-dimensional fields. The solution is constructed in the framework of finite element technology based on the Schwarz alternating method. The method consists of alternating between fulfilling the power and the kinematical boundary conditions on the contact surface. The stress-strain state of the tool joint is analyzed.
Ключевые слова: контактное взаимодействие упругих тел, метод Шварца, метод конечных элементов, итерационное решение
Keywords: Contact interaction of elastic bodies, the Schwartz method, finite element method, the iterative solution
Оценке надёжности и долговечности ответственных элементов конструкций предшествует анализ напряжённо-деформированного состояния с учетом особенностей контактного взаимодействия. Поскольку контакт — это основной метод приложения нагрузок к деформируемому телу, решение контактных задач является весьма важным и актуальным. Аналитические решения могут быть получены только для очень ограниченного класса задач механики деформируемого твердого тела, поэтому необходимым является дальнейшее развитие прикладных методов математического моделирования применительно к решению контактных задач механики с учетом неупругого деформирования материала исследуемых конструкций.
Актуальной является также проблема создания новых эффективных алгоритмов и на их основе современного прикладного программного обеспечения для решения контактных задач вычислительной механики. Ниже рассматривается алгоритм решения контактной задачи теории упругости, базирующийся на альтернирующем методе Шварца.
Математическая формулировка контактной задачи теории упругости включает: уравнения равновесия
![]()
![]() ; (1)
; (1)
граничные условия
![]()
![]() ; (2)
; (2)
![]()
![]() ; (3)
; (3)
соотношения Коши
![]()
![]() ; (4)
; (4)
и определяющие уравнения в форме закона Гука
![]() (5)
(5)
здесь D — матрица Гука, ![]() — вектор напряжений,
— вектор напряжений, ![]() — вектор деформации,
— вектор деформации, ![]() — вектор заданных перемещений точек поверхностей
— вектор заданных перемещений точек поверхностей ![]() и
и ![]() ,
, ![]() — компоненты распределенной нагрузки
— компоненты распределенной нагрузки ![]() на поверхностях
на поверхностях ![]() и
и ![]() .
.
Кроме того, на поверхности контакта ![]() должны быть выполнены условия контактного взаимодействия: кинематическое
должны быть выполнены условия контактного взаимодействия: кинематическое
![]() (6)
(6)
и силовое
![]() , (7)
, (7)
где: ![]() ,
, ![]() — проекции перемещений граничных точек на внешнюю нормаль к границе тела B;
— проекции перемещений граничных точек на внешнюю нормаль к границе тела B;
![]() — начальное расстояние по нормали между граничными точками;
— начальное расстояние по нормали между граничными точками;
![]() ,
, ![]() — составляющие поверхностных сил по внешней нормали к границе тела B. Соотношения (6) и (7) соответствуют случаю, когда трение не учитывается.
— составляющие поверхностных сил по внешней нормали к границе тела B. Соотношения (6) и (7) соответствуют случаю, когда трение не учитывается.
Для решения контактной задачи (1)—(7) был использован алгоритм, основанный на альтернирующем методе Шварца [3—5]. Данный метод является итерационным. Его суть состоит в следующем. В первом шаге на контактных поверхностях тел ![]() и
и ![]() соответственно
соответственно ![]() и
и ![]() задают начальные перемещения
задают начальные перемещения ![]() и
и ![]() , которые имеют смысл дополнительных кинематических условий.
, которые имеют смысл дополнительных кинематических условий.
Далее решают независимо две подобные задачи теории упругости для тел ![]() и
и ![]() . Затем вычисляют поверхностные силы
. Затем вычисляют поверхностные силы ![]() и
и ![]() на контактных поверхностях
на контактных поверхностях ![]() и
и ![]() и корректируют их так, чтобы выполнялись силовые контактные условия (7).
и корректируют их так, чтобы выполнялись силовые контактные условия (7).
Во втором шаге на контактных поверхностях ![]() и
и ![]() задают силовые контактные условия, в качестве которых используют скорректированные поверхностные силы
задают силовые контактные условия, в качестве которых используют скорректированные поверхностные силы ![]() и
и ![]() , и вновь решают независимо задачи теории упругости отдельно для тел
, и вновь решают независимо задачи теории упругости отдельно для тел ![]() и
и ![]() . По результатам полученных решений, выполняют коррекцию компонент векторов перемещений
. По результатам полученных решений, выполняют коррекцию компонент векторов перемещений ![]() и
и ![]() соответственно точек контактных поверхностей
соответственно точек контактных поверхностей ![]() и
и ![]() с тем, чтобы выполнялись кинематические условия контактного взаимодействия (6). Скорректированные перемещения точек контактных поверхностей
с тем, чтобы выполнялись кинематические условия контактного взаимодействия (6). Скорректированные перемещения точек контактных поверхностей ![]() и
и ![]() рассматривают в качестве новых кинематических граничных условий на геометрически измененных поверхностях контакта
рассматривают в качестве новых кинематических граничных условий на геометрически измененных поверхностях контакта ![]() и
и ![]() и вновь решают независимо задачи теории упругости отдельно для тел
и вновь решают независимо задачи теории упругости отдельно для тел ![]() и
и ![]() .
.
Для численного решения контактной задачи был использован метод конечных элементов [1]. Рассмотрим контакт двух тел ![]() и
и ![]() . Пронумеруем узлы контактных поверхностей
. Пронумеруем узлы контактных поверхностей ![]() и
и ![]() и введем в рассмотрение векторы —
и введем в рассмотрение векторы — ![]() и
и ![]() ,
, ![]() , первый из которых составлен из компонент перемещений
, первый из которых составлен из компонент перемещений ![]() и
и ![]() узлов, расположенных на контактной поверхности
узлов, расположенных на контактной поверхности ![]() , а второй — из компонент
, а второй — из компонент ![]() и
и ![]() узловых сил тех же узлов. Последовательно для каждого тела в соответствии с алгоритмом выполняется коррекция компонент векторов
узловых сил тех же узлов. Последовательно для каждого тела в соответствии с алгоритмом выполняется коррекция компонент векторов ![]() и
и ![]() ,
, ![]() . Коррекция компонентов векторов
. Коррекция компонентов векторов ![]() и
и ![]() ,
, ![]() реализуется поочередно: на каждой четной итерации корректируются компоненты вектора
реализуется поочередно: на каждой четной итерации корректируются компоненты вектора ![]() , а на нечетной итерации –
, а на нечетной итерации – ![]() .
.
Коррекция компонент вектора ![]() выполняется в соответствии с соотношением
выполняется в соответствии с соотношением
 (8)
(8)
где: ![]() — итерационный параметр,
— итерационный параметр,
![]()
![]() — узел, лежащий на контактной поверхности
— узел, лежащий на контактной поверхности ![]() тела
тела ![]() ,
,
 — вектор перемещений сходственной точки
— вектор перемещений сходственной точки ![]() , лежащей на контактной поверхности
, лежащей на контактной поверхности ![]() тела
тела ![]() .
.
Для коррекции компонент вектора контактных узловых сил ![]() используется формула
используется формула
 (9)
(9)
здесь ![]() — итерационный параметр,
— итерационный параметр, ![]()
![]() — узел, лежащий на контактной поверхности
— узел, лежащий на контактной поверхности ![]() тела
тела ![]() ,
,  — вектор контактных узловых сил сходственной точки
— вектор контактных узловых сил сходственной точки ![]() , лежащей на контактной поверхности
, лежащей на контактной поверхности ![]() тела
тела ![]() .
.
Пусть для определенности ![]() и
и ![]() . На четных итерациях и нечетных итерациях итерационные параметры
. На четных итерациях и нечетных итерациях итерационные параметры ![]() и
и ![]() соответственно определяются с помощью выражений
соответственно определяются с помощью выражений
 ,
,  (10)
(10)
где: ![]() — норма вектора перемещения
— норма вектора перемещения ![]() узла
узла ![]()
![]() , лежащего на контактной поверхности
, лежащего на контактной поверхности ![]() тела
тела ![]() ,
,
![]() — норма вектора перемещения
— норма вектора перемещения ![]() сходственной точки
сходственной точки ![]() , лежащей на контактной поверхности
, лежащей на контактной поверхности ![]() тела
тела ![]() ,
,
![]() — норма вектора контактных сил
— норма вектора контактных сил ![]() узла
узла ![]() ,
,
![]() — норма вектора контактных сил
— норма вектора контактных сил ![]() сходственной точки
сходственной точки ![]() [4].
[4].
Описанный выше алгоритм был использован для расчета НДС замковых соединений типа “ласточкин хвост” лопаток и дисков компрессора. Изучалось распределение напряжений в наиболее напряженной области соединений — пазах дисков. Геометрические параметры соединения взяты из работы [2]. В силу симметрии для всех деталей рассматривается правая половина.
Предполагалось, что нагрузка на лопатку моделируется приложением к верхней грани верхнего тела растягивающей распределенной нагрузки ![]() МПа. На рис. 1 показано распределение напряжений, действующих в направлении растягивающей нагрузки.
МПа. На рис. 1 показано распределение напряжений, действующих в направлении растягивающей нагрузки.
![]()
![]()
![]()
![]()
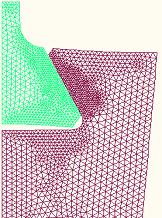
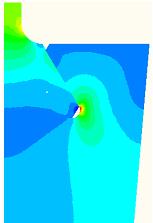
Рисунок 1. Распределение компоненты тензора напряжения ![]() (МПа)
(МПа)
Выводы:
Разработан алгоритм решения контактной задачи с учетом упругопластической деформации, основанный на альтернирующем методе Шварца. Проведено исследование НДС замкового соединения типа «ласточкин хвост» диска и лопатки компрессора с учетом контактного взаимодействия.
Список литературы:
1.Зенкевич О. Метод конечных элементов в технике. М.: Мир, 1975. — 542 с.
2.Мавлютов Р.Р. Концентрация напряжений в элементах конструкций. М.: Наука, 1996. — 240 с.
3.Можаровский Н.С., Качаловская Н.Е. Приложение методов теории пластичности и ползучести к решению инженерных задач машиностроения: В 2 т. Т. 2: Методы и алгоритмы решения краевых задач. К.: Выща школа, 1991. — 287 с.
4.Станкевич И.В., Яковлев М.Е., Си Ту Хтет. Разработка алгоритма контактного взаимодействия на основе альтернирующего метода Шварца // Вестник МГТУ им. Н.Э. Баумана. Сер. Естественные науки. — 2011. — Спец. вып. Прикладная математика. — С. 134—141.
5.Цвик Л.Б. Принцип поочередности в задачах о сопряжении и контакте твердых деформируемых тел. // Прикл. Мех. — 1980 — т. 16, Ш I — С. 13—18.