
Статья опубликована в рамках: XXIV Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 07 августа 2013 г.)
Наука: Технические науки
Секция: Аэрокосмическая техника и технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ДОПЛЕРОВСКИЙ ПЕЛЕНГАТОР С ОДНОЙ ВРАЩАЮЩЕЙСЯ АНТЕННОЙ
Сорочан Анатолий Григорьевич
д-р техн. наук, профессор Донецкого национального
технического университета, г. Донецк
Добряк Дмитрий Александрович
канд.физ.-мат. наук, ведущий инженер, Samsung центр управления и развития в Украине (SRK) г. Киев
Добряк Оксана Анатольевна
канд.физ.-мат. наук, инженер, Samsung центр управления и развития в Украине (SRK) г. Киев
Нестругин Александр Владимирович
магистрант Донецкого национального технического университета, г. Донецк
E-mail:
A DOPPLER DIRECTION FINDER WITH ONE ROTATING ANTENNA
Sorochan Anatoliy
dr. Sci. Tech., Professor of Donetsk National Technical University, Donetsk
Dobryak Dmitriy
candidate of Physics and Mathematical Sciences, chief engineer,
Samsung Ukraine Research & Development Centre, Kiev
Dobryak Oksana
candidate of Physics and Mathematical Sciences, engineer,
Samsung Ukraine Research & Development Centre, Kiev
Nestrugin Aleksandr
master of Donetsk National Technical University, Donetsk
АННОТАЦИЯ
Исследуется одноканальный доплеровский пеленгатор с целью раскрытия важных особенностей его работы. В основу исследований положен спектральный метод анализа, теория функций Бесселя, теория радиоприемных устройств и систем. Уточнено выражение выходного напряжения пеленгатора. Определение углового положения цели может производиться как на нечетных, так и четных гармониках частоты вращения антенны. Даются рекомендации по максимизации уровня выходного сигнала. Доказано, что нестабильность фазовой характеристики, коэффициента усиления линейного тракта, не влияют на результат измерений.
ABSTRACT
A Doppler single-channel direction finder is researched t reveal important features of its work. The research is based on spectral analysis methods, the Bessel functions, theory of radio devices and systems. The output voltage expression of the finder is clarified. Determination of target angular position can be conducted both on the even and odd harmonics of antenna rotating frequency. Recommendations for maximizing output level are given. It is proved that amplification factor and phase characteristic instability of linear tract do not influence on the measurement results.
Ключевые слова: пеленгатор; доплеровская частота; индекс модуляции; задержка; фаза; функция Бесселя; полосовой фильтр; модулирующая частота.
Keywords: direction finder; Doppler frequency; deviation ratio; dwell time; phase; Bessel function; band pass filter; modulation frequency.
Структурная схема, реализующая одноканальный доплеровский метод пеленгации [1, 2], приведена на рис. 1.
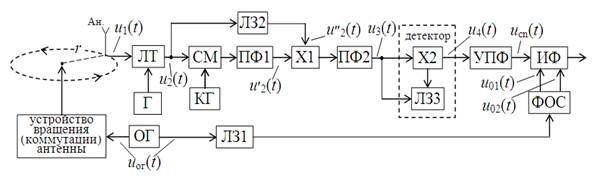
Рисунок 1. Структурная схема одноканального доплеровского пеленгатора
где Ан — антенна; ЛТ — линейный тракт приемника; Г — гетеродин; ОГ — опорный генератор; СМ — смеситель; КГ — кварцевый генератор; ЛЗ1—ЛЗ3 — первая-третья линии задержки; ФОС — формирователь ортогональных сигналов; ПФ1 и ПФ2 — первый и второй полосовые фильтры; Х1 и Х2 — первый и второй перемножители; УПФ — узкополосный фильтр; ИФ — измеритель фазы.
Полагаем, что объект пеленгации излучает немодулированное гармоническое колебание, которое описывается выражением
![]() ,
,
где: ![]() ,
, ![]() и
и ![]() — амплитуда, несущая частота и начальная фаза сигнала.
— амплитуда, несущая частота и начальная фаза сигнала.
Антенна Ан. вращается по кругу радиусом ![]() с угловой скоростью
с угловой скоростью ![]() . Частота вращения
. Частота вращения ![]() задается опорным генератором (ОГ), с выходным напряжением
задается опорным генератором (ОГ), с выходным напряжением
![]() ,
,
где: ![]() и
и ![]() — соответственно, амплитуда и начальная фаза напряжения ОГ, которую полагаем равной
— соответственно, амплитуда и начальная фаза напряжения ОГ, которую полагаем равной ![]() .
.
На практике вместо вращающейся антенны применяют неподвижные антенны, расположенные по окружности, которые последовательно и поочередно подключаются к входу приемника с частотой ![]() .
.
В работе [3] показано, что выходное напряжение вращающейся антенны
 ,
,
где: ![]() — амплитуда сигнала;
— амплитуда сигнала;
![]() — индекс модуляции;
— индекс модуляции;
![]() — угловое положение цели;
— угловое положение цели;
![]() — начальная фаза;
— начальная фаза;
![]() — некоторая фаза, определяемая исходным положением антенны.
— некоторая фаза, определяемая исходным положением антенны.
Входной сигнал ЛТ ![]() с помощью гетеродина Г смещается вниз по частоте и на выходе ЛТ будет определен в виде
с помощью гетеродина Г смещается вниз по частоте и на выходе ЛТ будет определен в виде
![]() ,
,
где: ![]() — коэффициент учитывающий непостоянство усилительных свойств ЛТ;
— коэффициент учитывающий непостоянство усилительных свойств ЛТ;
![]() — несущая частота выходного сигнала ЛТ;
— несущая частота выходного сигнала ЛТ;
![]() — результирующая начальная фаза сигнала;
— результирующая начальная фаза сигнала;
![]() — фаза модулирующего сигнала, вызванная задержкой сигнала в ЛТ;
— фаза модулирующего сигнала, вызванная задержкой сигнала в ЛТ;
![]() — фаза сигнала, вызванная его задержкой в ЛТ, нестабильностью ЛТ и начальной фазой гетеродина Г.
— фаза сигнала, вызванная его задержкой в ЛТ, нестабильностью ЛТ и начальной фазой гетеродина Г.
Преобразованный с помощью генератора КГ с частотой ![]() и начальной фазой
и начальной фазой ![]() выходной сигнал смесителя СМ
выходной сигнал смесителя СМ
![]() ,
,
в котором ![]() — временная задержка ПФ1.
— временная задержка ПФ1.
Выходной сигнал второй линии задержки ЛЗ2 с временной задержкой ![]()
![]() .
.
Сигнал, выделенный фильтром ПФ2 с временной задержкой ![]() , из результата перемножения сигналов в Х1 определится выражением
, из результата перемножения сигналов в Х1 определится выражением
![]() ,
,
в котором ![]() — вновь сформированный индексом модуляции,
— вновь сформированный индексом модуляции, ![]() , а
, а ![]() .
.
Полученное выражение характеризуется отсутствием фаз ![]() и
и ![]() . Кроме того, несущая частота сигнала
. Кроме того, несущая частота сигнала ![]() и ее стабильность определяются параметрами КГ. Каждая спектральная составляющая
и ее стабильность определяются параметрами КГ. Каждая спектральная составляющая ![]() сигнала
сигнала ![]() содержит информацию об угловом положении цели. Для выделения пеленга сигнал подается на корреляционный детектор, состоящий из перемножителя Х2 и линии задержки ЛЗ3 с временной задержкой
содержит информацию об угловом положении цели. Для выделения пеленга сигнал подается на корреляционный детектор, состоящий из перемножителя Х2 и линии задержки ЛЗ3 с временной задержкой ![]() . Поэтому выделенная на выходе Х2 низкочастотная составляющая сигнала определится равенством
. Поэтому выделенная на выходе Х2 низкочастотная составляющая сигнала определится равенством
![]() ,
,
где: ![]() — преобразованный индекс модуляции.
— преобразованный индекс модуляции.
Начальная фаза ![]() сигнала
сигнала ![]() определяет вид спектра. Так при выполнении равенства
определяет вид спектра. Так при выполнении равенства ![]() , где
, где ![]() напряжение
напряжение ![]() запишется
запишется
![]() ,
,
а его разложение будет иметь вид
![]()
![]() .
.
Энергия сигнала ![]() распределена только между четными составляющими спектра. Поэтому ИФ пеленгатора может работать на одной из четных гармоник частоты модуляции
распределена только между четными составляющими спектра. Поэтому ИФ пеленгатора может работать на одной из четных гармоник частоты модуляции ![]() . Знак минус указывает на то, что фазы всех спектральных составляющих имеют дополнительный сдвиг равный
. Знак минус указывает на то, что фазы всех спектральных составляющих имеют дополнительный сдвиг равный ![]() .
.
При выборе в ![]() начальной фазы из условия
начальной фазы из условия ![]() (здесь
(здесь ![]() ), исходное выражение запишется
), исходное выражение запишется
![]() ,
,
а его разложение примет вид
![]()
![]() .
.
В этом случае энергия сигнала будет распределена только между нечетными составляющими спектра, поэтому ИФ пеленгатора может работать на одной из нечетных гармоник частоты модуляции.
Одно из назначений линии ЛЗ3 — формирование на выходе детектора требуемой гармонической составляющей с максимальным уровнем, чем обеспечивается максимальное выходное отношение сигнал/шум. Для ее выделения на выходе Х2 включен УПФ фильтр со средней частотой равной частоте выделяемой спектральной составляющей ![]() .
.
Установление уровня выбранной гармонической составляющей производится в два этапа. На первом этапе — изменением отношения ![]() или временной задержки
или временной задержки ![]() или же изменением как одного, так и другого параметра, чем задается индекс модуляции
или же изменением как одного, так и другого параметра, чем задается индекс модуляции ![]() , при котором значение функции Бесселя
, при котором значение функции Бесселя ![]() будет максимально. Для разных гармоникзначения индекса модуляции будет иметь свое значение, т.е.
будет максимально. Для разных гармоникзначения индекса модуляции будет иметь свое значение, т.е. ![]() , где
, где ![]() — номер выбранной гармоники. Так для первой гармонии максимум достигается при
— номер выбранной гармоники. Так для первой гармонии максимум достигается при ![]() , для второй —
, для второй — ![]() и т.д. На втором этапе, благодаря выполнению условия
и т.д. На втором этапе, благодаря выполнению условия ![]() , незначительным уточнением
, незначительным уточнением ![]() добиваются установления начальной фазы
добиваются установления начальной фазы ![]() равной
равной ![]() или
или ![]() . На этом этапе незначительные изменения τ3 не окажут заметного отклонения значения функции Бесселя
. На этом этапе незначительные изменения τ3 не окажут заметного отклонения значения функции Бесселя ![]() от максимального
от максимального ![]() .
.
Таким образом, задержка в ЛЗ3 определяется выбором гармоники модулирующего колебания. Если выделенная гармоника ![]() , то индекс модуляции
, то индекс модуляции ![]() будет обеспечен при временной задержке
будет обеспечен при временной задержке
 .
.
Выделенная фильтром УПФ из выходного сигнала перемножителя Х2 рабочая гармоника, с учетом временной задержки ![]() в фильтре, запишется как
в фильтре, запишется как
![]() .
.
Выбор рабочей гармонической составляющей выше первого порядка, т. е. при ![]() определяется, как указывается в [1, 2, 3], требуемой точностью измерений. Точность измерительного устройства определяется крутизной его характеристики. Для фазового детектора (ИФ) крутизна характеристики определяется значением частоты входного сигнала. Однако выбор за рабочую гармоническую составляющей частотой
определяется, как указывается в [1, 2, 3], требуемой точностью измерений. Точность измерительного устройства определяется крутизной его характеристики. Для фазового детектора (ИФ) крутизна характеристики определяется значением частоты входного сигнала. Однако выбор за рабочую гармоническую составляющей частотой ![]() при
при ![]() приводит к неоднозначности измерений углового положения цели [1, 2].
приводит к неоднозначности измерений углового положения цели [1, 2].
При однозначном отсчете углового положения цели работа ИФ ведется на первой гармонике напряжения ![]() . Поэтому из последнего выражения выходное напряжение УПФ определится, положив
. Поэтому из последнего выражения выходное напряжение УПФ определится, положив ![]() , равенством
, равенством
![]() .
.
Для определения углового положения источника излучения используется ортогональная система сигналов, представляющая собой пару гармонических колебаний ![]() ,
, ![]() . Такая пара колебаний формируется в устройстве формирования ортогональных сигналов ФОС из колебания ОГ. Для устранения фазового сдвига
. Такая пара колебаний формируется в устройстве формирования ортогональных сигналов ФОС из колебания ОГ. Для устранения фазового сдвига ![]() на результат измерений на выходе ОГ включена линия ЛЗ1 с задержкой на время
на результат измерений на выходе ОГ включена линия ЛЗ1 с задержкой на время ![]() . Тогда выходные колебания ФОС запишутся как
. Тогда выходные колебания ФОС запишутся как
![]() ;
; ![]() .
.
В ИФ вычисляются проекции координат входного сигнала ![]() на координатные оси, в качестве которых выступает ортогональная пара колебаний
на координатные оси, в качестве которых выступает ортогональная пара колебаний ![]() и
и ![]() . Поскольку уровень ортогональных составляющих
. Поскольку уровень ортогональных составляющих ![]() , то проекции сигнала
, то проекции сигнала ![]() определятся равенствами
определятся равенствами
![]() ;
; ![]() .
.
Отсюда угловое положение цели определится как
 .
.
При необходимости повышения точности измерения пеленга в [1, 2] рекомендуется работать на более высокой гармонике ![]() частоты вращения антенны. В этом случае необходимо учитывать увеличение фазового сдвига в число раз соответствующее номеру гармоники
частоты вращения антенны. В этом случае необходимо учитывать увеличение фазового сдвига в число раз соответствующее номеру гармоники ![]() , что повлияет на выбор значений временных задержек в ЛЗ1
, что повлияет на выбор значений временных задержек в ЛЗ1 ![]() и ЛЗ3
и ЛЗ3 ![]() .
.
Список литературы:
1.Астафьев Г.Л., Шебшаевич В.С., Юрков Ю.А. Радиотехнические средства навигации летательных аппаратов. М.: Советское радио, 1962. — 952 с.
2.Кукес И.С. Основы радиопеленгации / И.С. Кукес, М.Е. Старик. М.: Советское радио, 1964. — 640 с.
3.Сорочан А.Г., Добряк Д.А., Добряк О.А. Двухканальный доплеровский пеленгатор // Восточно-Европейский журнал. — 2013. — № 2/9 (62) — С. 34—38.
дипломов