Статья опубликована в рамках: XVII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 23 января 2013 г.)
Наука: Технические науки
Секция: Энергетика и энергетические техника и технологии
Скачать книгу(-и): Сборник статей конференции, Сборник статей конференции часть II
- Условия публикаций
- Все статьи конференции
дипломов

ОСОБЕННОСТИ СИСТЕМЫ УПРАВЛЕНИЯ МЕХАНОТЕРАПЕВТИЧЕСКОГО УСТРОЙСТВА ДЛЯ РЕАБИЛИТАЦИИ ЛОКТЕВОГО СУСТАВА
Яцун Сергей Федорович
д-р техн. наук, профессор, зав. кафедрой теоретической механики и мехатроники, ЮЗГУ, г. Курск
Тарасова Елена Сергеевна
аспирант кафедры теоретической механики и мехатроники, ЮЗГУ, г. Курск
е-mail: little_owl@mail.ru
FEATURES OF THE CONTROL SYSTEM OF THE DEVICE FOR REHABILITATION OF THE ELBOW JOINT
Sergey Yatsun
Doctor of Technical Sciences, Professor, Head of the Department of Theoretical Mechanics and Mechatronics, SWSU, Kursk
Elena Tarasova
Postgraduate student of the Department of Theoretical Mechanics and Mechatronics, SWSU, Kursk
АННОТАЦИЯ
Представлено описание режимов работы реабилитационной системы. Предложен способ определения параметров, характеризующих взаимодействие устройства и руки человека, проведено математическое моделирование сенсорной системы манжеты.
ABSTRACT
The description of operating modes of rehabilitation system is presented. The way of definition of the parameters characterizing interaction of the device and human hand is offered, mathematical modeling of sensor system of a cuff is spent.
Ключевые слова: механотерапия; реабилитационная система; локтевой сустав; режимы работы; датчики.
Keywords: the mechanotherapy; the rehabilitation system; the elbow joint; the kinematic model; operating modes; sensor system.
Реабилитация является одним из важнейших этапов в процессе выздоровления пациентов, перенесших инсульты, травмы или хирургические вмешательства, повлекшие за собой нарушения двигательных функций. Одним из самых действенных методов для таких пациентов является механотерапия (или кинезотерапия) — метод лечебной физкультуры, основанный на выполнении дозированных движений (преимущественно для отдельных сегментов конечностей), осуществляемых с помощью механотерапевтических аппаратов, облегчающих движения или, наоборот, требующих дополнительных усилий для их выполнения [4].
Механотерапия рекомендуется при повреждениях и заболеваниях опорно-двигательного аппарата и нервной системы, если необходимо избирательно работать над определенным суставом или мышечной группой с целью увеличения объема движения. В результате применения такого метода реабилитации наблюдаются следующие положительные эффекты:
· увеличение амплитуды движений в пораженных суставах;
· укрепление ослабленных мышц и улучшению их тонуса;
· улучшение нервно-мышечного аппарата упражняемой конечности;
· улучшение кровообращения и лимфообращения, а также обмена веществ пораженной конечности [1, 3].
С течением времени механотерапия прошла путь развития, начиная с принудительной разработки суставов силами исключительно врача-физиотерапевта, до современных устройств, способных реализовывать различные законы движения, контролировать и оценивать весь процесс реабилитации и даже вносить в него необходимые корректировки.
Можно выделить две основные проблемы, возникающие перед разработчиком такого реабилитационного устройства:
1. Необходимость как можно более точного соответствия осевых линий устройства с осевыми линиями суставов человека. В противном случае процесс движения выходит из-под контроля: получаемые траектории движения отличаются от предполагаемых, что может привести к недопустимому увеличению моментов нагрузки, действующих на суставы, и в конечном итоге нанести вред пациенту [1, 3, 5].
2. Сложность организации обратных связей и как следствие формирования алгоритмов управления: получать объективную информацию о состоянии мышечной ткани и нервной системы невозможно, поэтому возникает необходимость поиска косвенных параметров, характеризующих мышечную активность и достигнутый объем движения в суставе [5].
Таким образом, одним из главных условий корректной работы реабилитационного комплекса является наличие надежной сенсорной системы. Рассмотрим возможность реализации такой системы в устройстве, предназначенном для восстановления локтевого сустава. На основе проведенного анализа кинематики локтевого сустава и полученных траекторий движения запястья [7] была предложена следующая схема для расчета движения системы реабилитационное устройство-рука человека в целом:
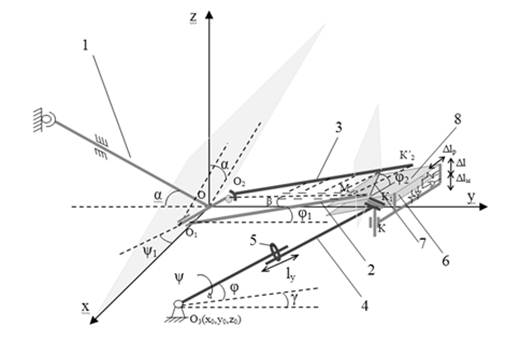
Рисунок 1. Расчетная схема системы «рука-устройство»
На рисунке приняты следующие обозначения: 1 — плечевая кость, 2 — локтевая кость, 3 — лучевая кость, φ1 — угол сгибания-разгибания, ψ1 — угол поворота плечевой кости, φ2 — угол поворота лучевой кости, φ — угол между осью устройства и горизонтальной плоскостью, ψ — угол поворота устройства вокруг своей оси (начальным будем считать положение, в котором вектор КК1 лежит в вертикальной плоскости), ly — длина телескопической трубки.
Устройство закреплено в точке О3 и представляет собой телескопическую трубку 4 (соединение двух ее частей обозначено цифрой 5), которая перемещает плоскость манжеты 6 при помощи толкателя 7. Так как манжета жестко закрепляется на руке, можно считать что точки К1 и К2 постоянно лежат в плоскости 8, находящейся на расстоянии Δl от плоскости 6, с которой происходит перемещение толкателя 7.
Так как точка закрепления устройства смещена относительно начала координат, плоскость в которой происходит перемещение оси расположена под углом γ к плоскости yOz.
Одной из главных особенностей механической части устройства является конструкция манжеты. Она прикрепляется к телескопической трубке посредством двух цилиндрических шарниров, позволяющих осуществлять поворот манжеты при изменении положения трубки и руки и компенсирующих смещения, возникающие при установке устройства. Так как рука может совершать ротацию только вокруг собственной оси, жесткое соединение манжеты с вращающейся частью устройства недопустимо. В связи с тем, что манжета не может быть выполнена в виде абсолютно жесткого тела, в расчетной схеме также учитываются продольная и поперечная жесткость манжеты, оказывающие влияние на перемещения Δlm и Δlp соответственно. Для постоянного контроля силы и момента, возникающих в точках контакта руки и устройства, в манжете предусмотрены датчики, расположенные как показано на рисунке 2
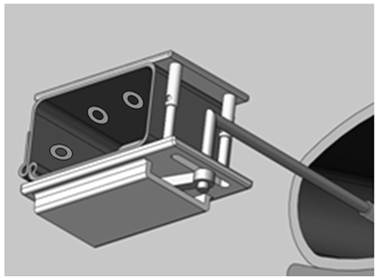
Рисунок 2. Расположение датчиков в манжете.
По показаниям датчиков определяются сила и момент, возникающие при контакте руки и механизма устройства. Сила может быть определена как векторная сумма показаний датчиков, момент — как соответствующая сумма создаваемых моментов при известных геометрических параметрах манжеты. При этом необходимо учитывать направление создаваемого на датчике усилия (рисунок 3) и тот факт, что при уменьшении силы ниже нуля сигнал датчика принимает нулевое значение.
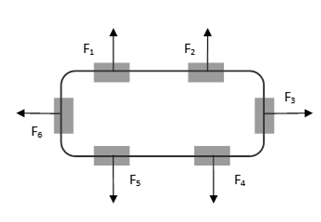
Рисунок 3. Направления сил, вызывающих изменение сигналов датчиков
Для исследования системы обработки сигналов, поступающих с датчиков, была разработана модель в пакете Matlab/Simulink, представленная на рисунке 4
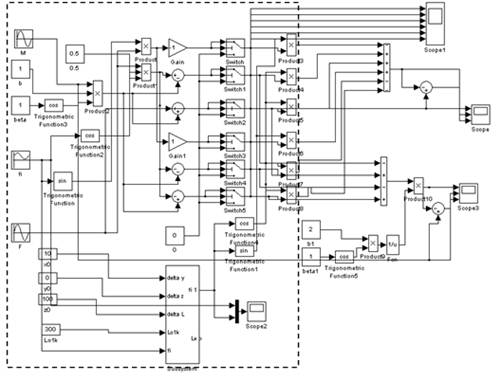
Рисунок 4. Схема, моделирующая работу датчиков
Выделенная область предназначена для моделирования работы датчиков. В ней происходит задание величин угла поворота устройства φ, а также силы и момента, возникающих в манжете (то есть непосредственно измеряемых). Затем происходит определение усилий, действующих на каждый датчик с учетов обрезания отрицательного сигнала (ключи Switch.. Switch5). Так как угол сгибания руки φ1 отличается от заданного угла φ, причем его величина зависит не только от геометрических параметров руки человека, но и от точности позиционирования устройства, для корректировки угла используется подсистема Subsystem, которая производит пересчет угла согласно схеме, представленной на рис. 1. Так, при смещении по оси z на 10 см разница углов составляет около 0,3 рад (рисунок 5). Затем смоделированные таким образом показания датчиков обрабатываются и полученные в результате значения силы и момента выводятся на соответствующие осциллографы. Оценим величину ошибки при определении силы и момента. Для этого зададим изменение этих величин, а также угла φ, как показано на рисунке 6.
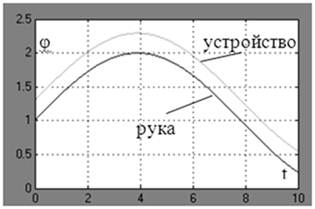
Рисунок 5. Углы поворота руки и устройства
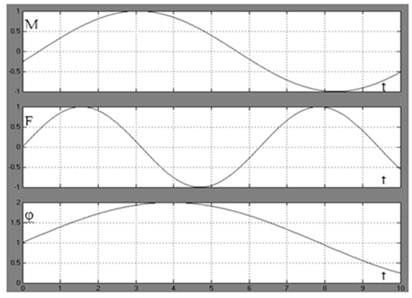
Рисунок 6. Задаваемое изменение момента, силы и угла
Графики сигналов, полученных с датчиков, представлены на рисунке 7, а на рисунках 8 и 9 представлены результаты моделирования, по которым можно сделать вывод о том, что погрешность определения силы не превышает 5 %, а при определении момента практически равна нулю.
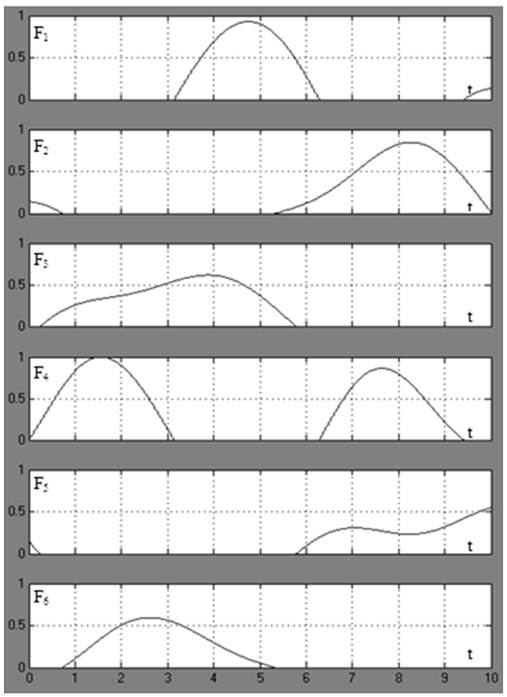
Рисунок 7. Сигналы датчиков
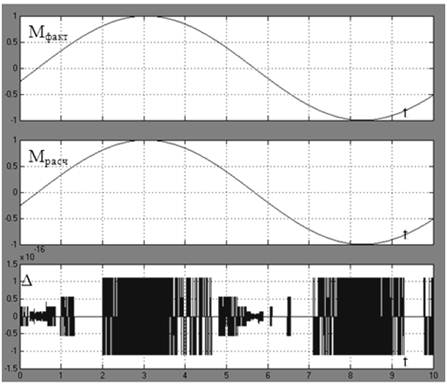
Рисунок 8. Результаты определения момента
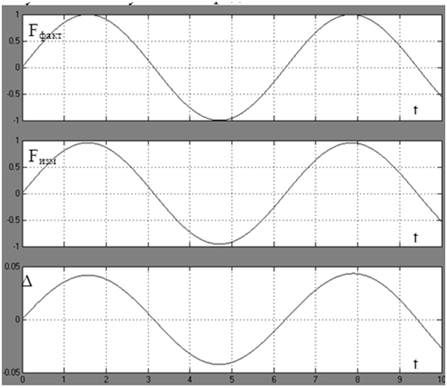
Рисунок 9. Результаты определения силы
Выводы: Предложенные режимы работы системы не только охватывают весь спектр возможных реабилитационных процедур, предусмотренных при восстановлении после повреждений опорно-двигательного аппарата или нервной системы, но и предусматривают возможность комбинирования различных вариантов движения, что позволяет минимизировать риск возможных травм в процессе использования устройства. Для оценки параметров работы устройства, а именно величин силы и момента, возникающих в манжете, можно использовать специальную сенсорную систему, погрешность которой по расчетам не превышает 5 %. Целью дальнейшей работы является изучение динамических особенностей системы при использовании различных способов управления.
Список литературы
1.Белова А.Н. Нейрореабилитация . — М. Антидор, 2000. — 568 с.
2.Зациорский, В.М. Биомеханика двигательного аппарата человека. Зациорский В.М. Аруин А.С. Селуянов В.Н. — М.: Физкультура и спорт. 1981. —143 с.
3.Коган, О.Г. Медицинская реабилитация в неврологии и нейрохирургии. Коган О.Г, Найдин В Л — М.: Медицина. 1988.
4.Малая медицинская энциклопедия. — М.: Медицинская энциклопедия. 1991—96 гг.
5.Яцун С.Ф., Тарасова Е.С. Кинематический анализ движения руки в локтевом суставе при реабилитации методами механотерапии. Известия Самарского научного центра Российской академии наук, 2011, том 13, № 4(4): 1215—1220
6.Peter Lum, David Reinkensmeyer, Richard Mahoney, William Z. Rymer, and Charles Burgar, Robotic Devices for Movement Therapy After Stroke: Current Status and Challenges to Clinical Acceptance. Top Stroke Rehabil 2002, 8(4):40—53.
7.Mansour G., Mitsi S., Bouzakis K.- D., A kinematic and dynamic model of the human upper extremity. Proceedings of the 3rd International Conference on Manufacturing Engineering (ICMEN), 1—3 October 2008, Chalkidiki, Greece.
дипломов