Статья опубликована в рамках: XLV Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 28 апреля 2015 г.)
Наука: Технические науки
Секция: Инжиниринговые и научно-технические системы и платформы
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
РАЗРАБОТКА И ИССЛЕДОВАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ НА ВИРТУАЛЬНОМ ПОЛИГОНЕ
Демин Анатолий Владимирович
д-р техн. наук, зав. кафедрой оптико-цифровых систем и технологий, профессор Санкт-Петербургского национального исследовательского университета информационных технологий, механики и оптики, РФ, г. Санкт-Петербург
Денисов Андрей Васильевич
вед. инженер кафедры оптико-цифровых систем и технологий, аспирант Санкт-Петербургского национального исследовательского университета информационных технологий, механики и оптики, РФ, г. Санкт- Петербург
E-mail:
DEVELOPMENT AND STUDY OF MATHEMATICAL MODELS FOR REMOTE SENSING THE EARTH'S SURFACE ON VIRTUAL RANGE
Anatoly Demin
Ph.D., Head. Chair of opto-digital systems and technologies, professor of St. Petersburg State University of Information Technologies, Mechanics and Optics, Russia, St. Petersburg
Andrey Denisov
vedas. engineer of the department optical-digital systems and technologies, a graduate student of the St. Petersburg State University of Information Technologies, Mechanics and Optics, Russia, St. Petersburg
АННОТАЦИЯ
Разработка и исследование оптико-цифровых систем дистанционного зондирования поверхности Земли в оптическом диапазоне спектра излучения является сложной задачей не только при проектировании, разработке и испытаниях, но и при непосредственной эксплуатации. Выход из сложившегося положения лежит в разработке математических, имитационных моделей в совокупности с применением натурного экспериментального стенда позволяющего разрабатывать имитационные виртуальные полигоны с базами данных моделей и вариаций различных ситуаций, возможных в процессе реальной эксплуатации.
ABSTRACT
Development and research of optical-digital systems for remote sensing the Earth's surface in the optical range of the emission spectrum is a challenge not only for the design, development and testing, but also for the immediate operation. Out of the situation lies in the development of mathematical, simulation models in conjunction with the use of full-scale test bench allows the development of virtual simulation polygons database models and variations of the various situations possible during the actual operation.
Ключевые слова: оптико-цифровая система; дистанционное зондирование поверхности Земли; виртуальный полигон.
Keywords: optical-digital system; remote sensing surface of the Earth; a virtual training ground.
Современный этап развития перспективных космических средств мониторинга поверхности Земли характеризуется продолжительным ростом числа и многообразия исследовательского оптико-цифрового оборудования, входящего в состав космического аппарата, выводимого на солнечно-синхронные, околокруговые, полярные, геостационарные и эллиптические орбиты. Одной из важнейших задач космического исследования является дистанционное зондирование поверхности Земли в оптическом диапазоне спектра излучения, что позволяет решать задачи мониторинга, геодезии и картографии, а также специальные задачи в реальном масштабе времени. Свыше 15 стран располагают собственными перспективными космическими аппаратами с оптико-цифровыми системами дистанционного зондирования, а общее число одновременно функционирующих спутников достигает нескольких десятков.
Создание высокоточных и надежных систем дистанционного зондирования является многоэтапным и многофакторным процессом. Следует отметить, что научно-технические проблемы, возникающие при этом, требует необходимости проведения большого объема теоретических и экспериментальных исследований, производства и испытаний, максимально обеспечивающих формирование космических комплексов, отвечающим реальным тактико-техническим зачетным требованиям, что приводит к значительному времени их разработки и переносам сроков опытно-конструкторских работ организациями-разработчиками. Выход из сложившейся ситуации лежит в применении методов совместного компьютерного имитационного и натурного моделирования (как на этапе создания, так и эксплуатации) на современных компьютерных стендах при возможности проведения всех сопутствующих работ, что позволяет обеспечивать принятие оптимального схемотехнического решения для перспективных космических систем с последующей его реализацией. Таким образом, основной задачей имитационного моделирования процесса целевого применения оптико-цифровых систем дистанционного зондирования является, в первую очередь, обеспечение высокой адекватности разрабатываемой модели. Для решения данной задачи необходим наиболее полный учет факторов дистанционного зондирования поверхности Земли в оптическом диапазоне спектра излучения (технических характеристик целевой и обеспечивающей аппаратуры, параметров фоноцелевой обстановки, условий наблюдения, особенностей решаемой задачи, средств обработки результатов наблюдения) и использования адекватных имитационных моделей их влияния. Однако соблюсти все данные характеристики со своими разнообразными физическими процессами очень сложно, что приводит к значительной алгоритмической сложности математических моделей и необходимости приведения их в единый алгоритм на так называемом виртуальном полигоне с использование высокопроизводительных вычислительных стендов (рисунок 1).
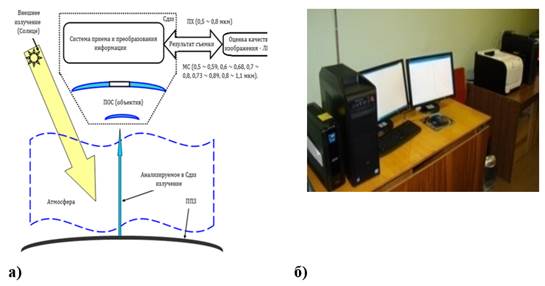
Рисунок 1. Схема приема и преобразования информации системы дистанционного зондирования (а) и программно-аппаратный стенд ЗАО «НПФ «ИнфоСистем-35» для процесса целевого применения дистанционного зондирования (б)
Где результатом является изображение, полученное в двух режимах съемки — панхроматическом (ПХ) и мультиспектральном (МС) диапазоны которых представлены в соответствии с рисунок 1а (как правило, съемка осуществляется в двух данных режимах, при этом изображение, полученное в результате ПХ съемки в два раза превышает (лучше) качество МС съемки, диапазон которого представляется в виде отдельных спектральных диапазонов);
программно-аппаратный стенд представляет собой имитатор цепи — «КОСМОС-ЗЕМЛЯ», где комплексы представляют собой стенд оптико-цифровой системы и наземного пункта приема и преобразования информации.
Таким образом, совместное применение имитационного и натурного моделирования на виртуальном полигоне является перспективной и актуальной не только на сегодняшний день, но и на последующие десятки лет.
Принцип работы оптико-цифровой системы в космосе представляет собой процесс анализа энергии в оптическом диапазоне (0,5 ~ 1,1 мкм), отраженной или излученной подстилающей поверхностью Земли. Поэтому получаемую со спутника информационный сигнал на наземный пункт можно рассматривать как результат прохождения информации от подстилающей поверхности Земли (ППЗ) через оптико-электронный тракт, состоящий из атмосферы и возмущений (турбулентности, фонов, помех и т. д.), системы приема и преобразования информации (СППИ) и приемной оптической системы (ПОС). Математическую модель системы дистанционного зондирования поверхности Земли (ДЗЗ) в рамках теории линейных систем представима в виде следующего функционала [3]
A Сдзз = {BАтмосферыÄ CАтм.возмщений Ä DСъемки Ä EСППИ Ä FПОС},
где: {BАтмосферыÄ CАтм.возмщений Ä DСъемки Ä EСППИ Ä FПОС} — суперпозиции оптических свойств атмосферы, оптических возмущений, изображение объекта съёмки и способов приёма и обработки оптической информации.
Принципиальной задачей математического моделирования является адаптация и доработка уже существующих методов, подходов и технологий к специфике постановки компьютерных экспериментов над моделью дистанционного зондирования и отображения их адекватных результатов. Архитектура по формированию динамических сцен для получения априорных (прогнозных) показателей процесса целевого применения оптико-цифровой системы создается в результате работы имитируемых критериев и заданных условий, занесенных в общий программный аппарат виртуального полигона [4].
Формой реализации виртуального полигона является среда имитационного моделирования, которая содержит следующие подсистемы [2]:
Ядро виртуального полигона, представляющее собой следующие подсистемы:
· библиотека математики (стандартные и сложные математические объекты);
· интерфейс программного обеспечения и файловой системы;
· система конфигураций.
2. Библиотека виртуального полигона для инициализации динамической сцены, обеспечивающая:
· загрузку, обработку и сохранение полученных данных;
· загрузку, обработку и сохранение изображений;
· загрузку, обработку и сохранение имитации.
Схема работы общего алгоритма представляется на рисунке 2. В начале процесса оператором задаются исходные данные моделирования (параметры орбиты, съемки и маршрута расшифровка которых приведена ниже), далее происходит процесс моделирования, где на первом комплексе происходит создание массивов изображений (всего их восемь, строятся они в результате маршрутной съемки поочередно), далее через локально-вычислительную сеть передаются на наземный комплекс приема и преобразования информации. В соответствии с алгоритмом процесса целевого применения происходит сшивка данных полос изображений полиномиальным методом по связующим точкам в единое изображение и окрас его методом нанесения искусственных цветов (по качеству (уровню) спектрального сигнала).

Рисунок 2. Общий алгоритм имитационного моделирования на виртуальном полигоне. где: a — длина большой полуоси орбиты; e — эксцентриситет; i — наклон орбиты; Ω — долгота восходящего узла; ω — аргумент широты; τ — момент прохождения через перигей; δ — угол тангажа; κ — угол крена; f — фокусное расстояние; E — скоба; B — ширина фокальной плоскости; l — длина маршрута;ν — скорость бега изображения; x — значение фотоприемного устройства; C — число матриц; L — размер пикселя; ψ — число строк матрицы; P — перекрытия в пикселях; ι — число пикселей в матрице; Z — число зон компенсаций
В результате чего формируется единое изображение с оценкой линейного разрешения на местности, т. е., распознаванием наименьшего объекта на изображении (в соответствии с рисунком 3, где проводился эксперимент для разных высот орбит 300, 500 и 700 км) [1].
Рисунок 3. Единые изображения, полученные в результате имитационного моделирования на виртуальном полигоне
Список литературы
1.Демин А.В., Денисов А.В. «Моделирование функционально-параметрических характеристик систем дистанционного зондирования поверхности Земли в оптическом диапазоне спектра излучения». Южно-Сибирский научно-технический вестник, выпуск — № 1 (9) — 2015 г. — С. 46—49.
2.Демин А.В., Денисов А.В. «Разработка динамической сцены для моделирования и анализа проектных решений оптико-цифровых систем дистанционного зондирования поверхности Земли». Южно-Сибирский научно-технический вестник, выпуск — № 1 (9) — 2015 г. — С. 50—56.
3.Папулис А. Теория систем и преобразований в оптике. М.: Мир, 1971 г. — С. 495.
4.Самарский А.А., Михайлов А.П. Математическое моделирование: Идеи. Методы. Примеры. 2-е изд., испр. М.: ФИЗМАТЛИТ, 2005 г. — С. 320. — ISВN 5-9221-0120-Х.
дипломов