Статья опубликована в рамках: LIV Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 25 января 2016 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ С ИСПОЛЬЗОВАНИЕМ КОНЦЕПЦИИ СИСТЕМНОГО СИНТЕЗА
Пролетарский Андрей Викторович
д-р техн. наук, проф. декан факультета «Информатика и системы управления»
Московского Государственного Технического Университета им. Н.Э. Баумана,
РФ, г. Москва
E-mail: neysipin@mail.ru
Селезнева Мария Сергеевна
аспирант Московского Государственного Технического Университета им. Н.Э. Баумана,
РФ, г. Москва
E-mail:
CONTROL SYSTEM OF FLYING VEHICLE USING THE CONCEPT OF SYSTEM SYNTHESIS
Andrei Proletarskii
doctor of Technical Sciences, Professor, Dean of “Informatics and Operating Systems” Department,
Bauman Moscow State Technical University,
Russia, Moscow
Maria Selezneva
post-graduate student of Bauman Moscow State Technical University,
Russia, Moscow
АННОТАЦИЯ
Исследован способ построения системы управления беспилотного летательного аппарата (ЛА). Большое внимание уделяется разработке систем с разнообразными интеллектуальными компонентами. Рассмотрено функционирование систем ЛА в сложных условиях окружающей среды. Эффективное выполнение поставленных задач и сохранение живучести ЛА может быть обеспечено с помощью управляющего комплекса, основанного на концепции системного синтеза. Предлагается использовать подход самоорганизации для построения прогнозирующей модели. На основании результатов прогноза определять состав управляющего комплекса.
ABSTRACT
The article prescribes the results of conducted research of development method for remote-piloted vehicle (RPV) control system. Systems with variety of intellectual components are considered with a great importance. RPV system’s operation under harsh environmental conditions is taken into consideration. Usage of control complex based on system synthesis makes possible the effective decisions for formulated problems and maintaining RPV’s operability. Self-organized approach for creating probability model is proposed to use. The results of such progress determine the structure of control complex.
Ключевые слова: системный синтез, система управления, ансамбль критериев, алгоритм самоорганизации, алгоритм прогноза, система с интеллектуальной компонентой.
Keywords: system synthesis, control system, criteria assembly, self-organization algorithm, prediction algorithm, system with intelligent component.
Исследован способ построения системы управления беспилотного летательного аппарата (ЛА), который осуществляет движение на атмосферном участке, затем в космосе и опять возвращается в атмосферу [6]. Разработка современных систем управления ЛА осуществляется на основе различных теорий и подходов. Большое внимание уделяется разработке систем с разнообразными интеллектуальными компонентами [7; 2; 3; 1].
Исследуемые ЛА функционируют в сложных условиях окружающей среды, пассивных и активных помех и активного противодействия. В связи с этим к ЛА и системам управления предъявляются жесткие требования по живучести и надежности.
В условиях сверхсильных возмущений некоторые системы управляющего комплекса теряют работоспособность, поэтому целесообразно сформировать из оставшихся систем редуцированный управляющий комплекс, который обеспечит выполнение поставленной задачи ЛА. Эффективное выполнение поставленных задач и сохранение живучести ЛА может быть обеспечено с помощью редуцированного управляющего комплекса, основанного на концепции системного синтеза [6; 4].
После сверхсильного воздействия на ЛА штатное функционирование управляющего комплекса нарушается и осуществляется проверка работоспособности составляющих его систем. В рамках концепции системного синтеза выделяются ключевые параметры, по которым и проводится контроль работоспособности систем. Количество ключевых параметров (размерность русла), которые хорошо отражает исследуемый процесс, как правило, невелико. Поэтому удается быстро выделить работоспособные системы и сформировать эффективную конфигурацию редуцированного управляющего комплекса ЛА.
Для определения русла необходимо сформировать ансамбль критериев, с помощью которого отбираются ключевые параметры, характеризующие работоспособность систем управляющего комплекса ЛА. Предлагается использовать ансамбль критериев селекции алгоритма самоорганизации [5; 9], который используется для построения прогнозирующей модели. После воздействия на ЛА сверхсильного возмущения состояние оставшихся работоспособными систем с течением времени может изменяться и возможно появление ситуации, когда системы через некоторый интервал времени теряют свою работоспособность – русло меняется.
На основе проведенных измерений вычисляется компактная прогнозирующая математическая модель изменения доминирующих параметров. С помощью этой модели осуществляется прогноз состояния управляющего комплекса на некотором интервале времени, который выбирается из практических соображений в соответствии с режимом функционирования ЛА.
На основании результатов прогноза определяется состав управляющего комплекса. В процессе функционирования комплекса, после сверхсильного воздействия, проводятся измерения и вычисляется прогноз его состояния и определяется оптимальная структура комплекса, которая будет использована на этом интервале функционирования.
В качестве примера применения подхода системного синтеза рассмотрим схему построения измерительного комплекса с интеллектуальной компонентой (ИИК). ИИК является модификацией селективного измерительного комплекса. Навигационные комплексы, реализующие селективный подход, состоят из максимально возможного количества систем и датчиков навигационной информации, а также алгоритмического обеспечения. Алгоритмическое обеспечение селективного измерительного комплекса (СИК) включает алгоритм выбора наиболее достоверной навигационной информации и алгоритм обработки этой информации с целью повышения точности.
Отличительной особенностью ИИК является наличие приспособительного эффекта, который на основан на принципе саморегуляции и обладает специфическими узловыми механизмами, в частности акцептором действия. Акцептор действия включает алгоритм построения модели исследуемых параметров, прогноз и сравнение текущих измерений с прогнозом. Акцептор действия является интеллектуальной компонентой. Структура ИИК представлена на рис. 1.
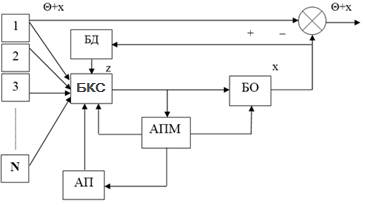
Рисунок 1. Структура измерительного комплекса с интеллектуальной компонентой
На рис. 1 введены следующие обозначения: БКС – блок комплексирования и сравнения; БД – динамическая база данных; АПМ – алгоритм построения модели; АП – алгоритм прогноза.
Список литературы:
- Неусыпин К.А., Логинова И.В. Вопросы теории и реализации интеллектуальных систем. – М.: Сигналъ, МПУ, 1999.
- Неусыпин К.А. Концептуальный синтез интеллектуальных систем. Автоматизация. Современные технологии. 2000. № 6. – С. 23–25.
- Неусыпин К.А. Направления развития интеллектуальных систем. // Автоматизация и современные технологии. 2002. № 12. – С. 12–16.
- Неусыпин К.А. Системный синтез систем управления с интеллектуальной компонентой // Автоматизация и современные технологии. 2007. № 3. С. 35–39.
- Неусыпин К.А., Фам С.Ф. Повышение степени управляемости летательного аппарата // Автоматизация. Современные технологии. 2007. № 2. – С. 21–25.
- Пролетарский А.В. Управление полетом ракет космического назначения. Учебное пособие // Федеральное агентство по образованию. Московский государственный областной университет. – М. 2006.
- Пролетарский А.В. Интеллектуализированные системы управления перспективных ракет космического назначения. // Автоматизация. Современные технологии. 2011, № 6. С. 30–33.
- Пролетарский А.В. Концепция системного синтеза динамических объектов. Автоматизация. Современные технологии. 2007. № 8. С. 28–33.
- Селезнева М.С., Оглоблина Ю.С. Построение самоорганизующейся модели с высокой степенью наблюдаемости // В сб. Научный взгляд. Труды международной научно-практической конференции. – М. 2015. С. 250–253.
дипломов