
Статья опубликована в рамках: XXIV Международной научно-практической конференции «Естественные и математические науки в современном мире» (Россия, г. Новосибирск, 05 ноября 2014 г.)
Наука: Математика
Секция: Дифференциальные уравнения, динамические системы и оптимальное управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ВОПРОСЫ УСТОЙЧИВОСТИ ПОЛОЖЕНИЙ РАВНОВЕСИЯ
Королев Владимир Степанович
канд. физ.-мат. наук, доцент, Санкт-Петербургский Государственный Университет, РФ, г. Санкт- Петербург
STABILITY SOLUTION OF THE EQUILIBRIUM POINT
Vladimir Korolev
candidate of Physical and Mathematical Sciences, assistant professor, Saint-Petersburg State University, Russia, Saint-Petersburg
АННОТАЦИЯ
Рассмотрены математические модели динамических систем классической механики на основе нелинейных дифференциальных уравнений. Исследованы особенности интегрирования этих уравнений, свойства их решений, устойчивость и поведение решений в окрестности положений равновесия. При исследованиях учтено изменение устойчивости решений в зависимости от постановки задачи, выбора обобщенных координат и уравнений, которые описывают процесс.
ABSTRACT
The mathematical models of dynamical systems in classical mechanics which are represented by nonlinear differential equations are considered. The integration peculiarities of these equations, their solutions properties, the stability and the solutions behavior in a neighborhood of the equilibrium point are investigated. The change of the solutions stability is taken account. This change is depending on the choice of generalized coordinates and equations that describe the process.
Ключевые слова: динамические системы; устойчивость решений.
Keywords: dynamical systems; stability of solution.
Введение.
Сложные процессы классической механики моделируются системами обыкновенных дифференциальных уравнений. При исследовании поведения нелинейных динамических систем важно знать основные свойства решений: существуют ли состояния равновесия, какие из них устойчивы, возможны ли колебательные режимы движения и при каких условиях [1—6]. Наличие даже малых возмущений периодического или случайного характера может изменить характер решений таких систем. Поэтому поведение и свойства решений систем, моделирующих управляемые процессы, определяются выбранными управляющими воздействиями. При этом анализируется вид полученной устойчивости.
Определения устойчивости.
Одним из первых определение понятия устойчивости было дано Л. Эйлером в 1749 г. в связи с практически важным вопросом того времени устойчивости кораблей Российского флота: «равновесное положение тела будет устойчиво, ежели оное тело, будучи несколько наклонено, опять исправится». Строгое определение понятия устойчивости положения равновесия и других решений динамических систем было дано в 1892 г. русским ученым А.М. Ляпуновым [2].
Устойчивость определяют по Эйлеру, по Лагранжу, по Ляпунову, рассматривается орбитальная устойчивость или устойчивость по части переменных [1]. В последнем случае оказывается, что фазовая траектория или её проекция на соответствующее подпространство остается в достаточной близости от опорной траектории, хотя изображающие точки могут сколь угодно разбегаться, удаляясь друг от друга со временем [6].
В механике устойчивость характеризуется ответом на достаточно малое отклонение в начальных данных или возмущение действующих сил для системы, находящейся в механическом равновесии. Устойчивость — способность системы сохранять текущее состояние равновесия или движения при влиянии внешних малых воздействий. Под неустойчивостью понимают способность систем при действии весьма малых возмущений получать большие перемещения.
Наглядным примером устойчивого состояния равновесия служит поведение тяжёлого шарика на гладкой поверхности в зависимости от формы и свойств в окрестности текущего положения. Если шарик отклонить от положения покоя, а он начнет колебаться около нижнего положения в ямке, то состояние равновесия устойчиво. В противном случае — неустойчиво. В том числе безразличное положение шарика на идеально гладкой горизонтальной плоскости.
Из теоремы Лагранжа-Дирихле следует, что положение равновесия для механической системы в однородном поле тяжести будет устойчивым, когда центр тяжести системы занимает наинизшее положение.
Применительно к упругим системам определение Эйлера можно сформулировать следующим образом: равновесие упругой системы при заданных внешних силах считается устойчивым, если после статического приложения и последующего снятия малой возмущающей силы система возвращается к своему исходному состоянию.
Линейная система называется устойчивой, если при выведении ее внешними воздействиями из состояния равновесия или покоя она в него возвращается после прекращения внешних воздействий. Если после прекращения внешнего воздействия система не возвращается к состоянию равновесия, то она является неустойчивой.
Однако в реальных механических системах всегда существуют силы сопротивления движению, возникающие благодаря трению или вязкости среды. Устойчивое положение равновесия становится асимптотически устойчивым при добавлении диссипативных сил с полной диссипацией. Такие силы не в состоянии неустойчивое положение равновесия сделать для консервативной системы устойчивым.
Критерии устойчивости.
В общем случае системы уравнений динамики в нормальной форме имеют особые точки или состояние равновесия при условии, что правые части обращаются в ноль:

Существуют различные критерии устойчивости, в том числе критерии Рауса и Гурвица, Найквиста и Михайлова, метод Тимошенко, метод Кармана, метод функций Ляпунова или простого экспериментального тестирования. Однако этими критериями пользоваться во многих случаях практически невозможно из-за необходимости проведения громоздких расчётов. Изменения свойств и также условий устойчивости решений возможны при переходе к новой системе уравнений при замене переменных [4; 5].
Уравнения Лагранжа второго рода для консервативных механических систем позволяют использовать для оценки устойчивости вид функции П(q) для потенциальной энергии. Положение равновесия находится из условий минимума по лагранжевым переменным:
Матрица вторых частных производных, которая вычисляется в положении равновесия, используется для оценки устойчивости. Для системы с одной степенью свободы требуется определить знак второй производной П(х) и выделить точки минимума (рис. 1).
При наличии k циклических интегралов порядок системы уравнений уменьшается. Получается система уравнений с функцией Рауса R(q), а устойчивость оценивают для оставшихся обобщенных координат.
При этом обобщенные импульсы, соответствующие циклическим координатам, остаются постоянными pi =const и определяют стационарные движения системы, которые могут иметь устойчивость или в режиме автоколебаний даже асимптотическую устойчивость (рис. 2).
В случае приведения уравнений к виду канонических систем можно проверять аналогичные условия для функции Гамильтона Н(х), которая при дифференцировании по фазовым переменным определяет все правые части уравнений движения.
Необходимо обратить внимание на возможные изменения свойств и условий устойчивости решений новых уравнений при замене переменных.
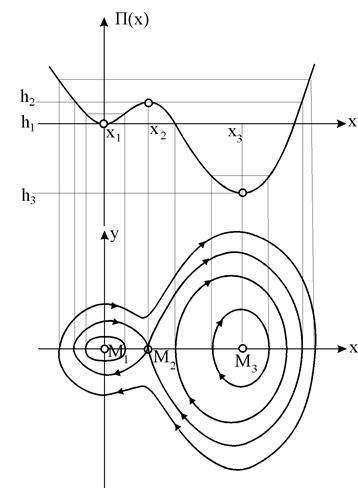
Рисунок 1. Фазовый портрет системы с одной степенью свободы
В случае контактных преобразований канонических уравнений при выборе нужной производящей функции получаем в новых переменных уравнения, где правые части равны нулю, а новые переменные определяют набор произвольных постоянных для решений первоначальной системы канонических уравнений. Следовательно, при любых допустимых начальных условиях они остаются постоянными, сохраняя малые начальные отклонения.
Если уравнения динамики системы записаны в каноническом виде и существует n первых интегралов, то по теореме Арнольда [4] фазовые траектории лежат на n-мерном торе, а движение системы является условно периодическим. В общем случае для системы дифференциальных уравнений в нормальной форме могут выполняться первые интегралы, которые определяют интегральные многообразия как пересечение соответствующих поверхностей. Это множество называют равновесным или стационарным режимом системы.
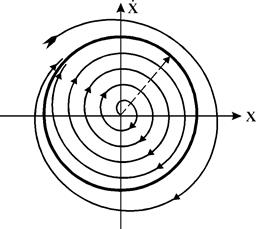
Рисунок 2. Фазовый портрет автоколебаний
Вопрос об устойчивости является одним из первых вопросов, возникающих при исследовании и проектировании систем управления. Наличие возмущений и управляющих воздействий может также влиять на свойства положений равновесия и возможные стационарные состояния. Для исследования этого влияния в известных математических моделях предлагаются модификации [4—6] или дополнения, упрощающие оценку устойчивости выделенных решений.
Примеры устойчивости состояний равновесия.
Наличие многих определений и критериев устойчивости может приводить к затруднениям или неправильному их использованию.
Наиболее просто и наглядно методы исследования устойчивости решений демонстрируются на примере системы дифференциальных уравнений математического маятника или гармонического осциллятора с учетом возмущений:
![]() .
.
Если ограничиваться линейным приближением, то уравнение превращается в уравнение гармонических колебаний
![]() .
.
Период линейного приближения не зависит от начальных условий. Поэтому малые колебания математического маятника будут изохронными.
Находим состояния равновесия, равные значениям угла![]() , которым отвечают устойчивые положения в точках минимума, и
, которым отвечают устойчивые положения в точках минимума, и ![]() , которым соответствуют неустойчивые положения.
, которым соответствуют неустойчивые положения.
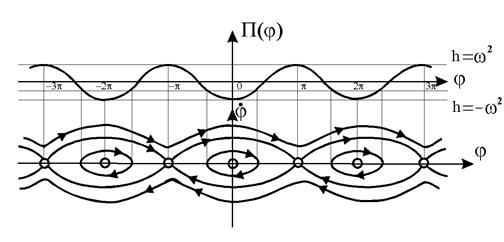
Рисунок 3. Фазовый портрет для математического маятника
При наличии возмущений и управлений система уравнений имеет вид:
![]()
тогда решение представляет сумму общего решения однородного и частного решения неоднородного уравнения
![]()
В механической системе всегда существуют силы сопротивления движению, возникающие благодаря трению или вязкости среды. Такие силы называют диссипативными .
Теорема Кельвина утверждает: Диссипативные силы с полной диссипацией делают устойчивое положение равновесия или точки покоя асимптотически устойчивыми.
Малые колебания в окрестности устойчивого положения равновесия также все являются устойчивыми решениями (в некоторой области) для системы уравнений, но к ним нельзя применить теорему Кельвина. Так как малые колебания проходят в окрестности положения равновесия, которое в случае действия диссипативных сил асимптотически устойчивы, тогда будет справедливо утверждение.
Теорема. Диссипативные силы делают устойчивое стационарное движение в окрестности выделенного устойчивого положения равновесия для консервативной системы неустойчивым.
Заключение.
Особенностью системы уравнений может являться существование первых интегралов, которые позволяют понизить порядок и проводить дальнейшее исследование устойчивости по упрощенным уравнениям для оставшихся фазовых переменных после исключения и преобразования к удобному виду. Это позволяет получить критерии условной устойчивости для начальной системы, а также критерии устойчивости для упрощенной системы при различных начальных данных и управляющих воздействиях, а также поведение системы при отклонении от положения равновесия.
Список литературы:
1.Воротников В.И. К теории устойчивости по отношению к части переменных // Прикладная математика и механика. — Т. 59(4), — 1995. — С. 553—561.
2.Ляпунов А.М. Общая задача об устойчивости движения. М.: Изд-во: Меркурий-Пресс, 2000. — 386 с.
3.Лойцянский Л.Г. Механика жидкости и газа. М.: Дрофа, 2003. — 840 с.
4.Зубов И.В. Методы анализа динамики управляемых систем. М.: Физматлит, 2003. — 224 с.
5.Новоселов В.С., Королев В.С. Аналитическая механика управляемой системы. СПб.: изд. СПбГУ, 2005. — 298 с.
6.Королев В.С. Устойчивость решений динамических систем по части переменных // Естественные и математические науки в современном мире / Сб. статей по материалам XIX междунар. науч.-практ. конф. № 6 (18). Новосибирск: изд. «СибАК», 2014. — С. 14—22.
дипломов