Статья опубликована в рамках: V Международной научно-практической конференции «Естественные и математические науки в современном мире» (Россия, г. Новосибирск, 28 апреля 2013 г.)
Наука: Математика
Секция: Дифференциальные уравнения, динамические системы и оптимальное управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

АЛГОРИТМ ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ СИСТЕМОЙ ТРЕТЬЕГО ПОРЯДКА С ТРЕМЯ НУЛЕВЫМИ ПОЛЮСАМИ В УСЛОВИЯХ ОГРАНИЧЕННЫХ ПОМЕХ
Кучеров Дмитрий Павлович
д-р техн. наук, с.н.с., профессор, НАУ, г. Киев, Украина
E-mail: d_kucherov@ukr.net
Козуб Андрей Николаевич
канд. техн. наук, с.н.с., доцент, НАУ, г. Киев, Украина
E-mail:
Введение. Методам и алгоритмам управления, позволяющим обеспечить высокую точность управления в ограниченное время, в последнее время в научной литературе уделяется значительное внимание. К таким методам относятся и методы терминального управления, позволяющие реализовать перевод объекта из произвольной точки пространства в заданную за минимальное время.
В работах по теории автоматического управления эта задача для систем с полностью известной информацией о постоянных параметрах системы формулируется, как задача о максимальном быстродействии. Строгое доказательство существования закона управления и формулировка необходимых и достаточных условий существования решения задачи представлено в работах советского ученого Л.С. Понтрягина и его последователей [1, 6]. Предлагаемый этими учеными подход предполагает решение во временной области. Как известно, управляющее воздействие имеет кусочно-непрерывный (импульсный) характер и знакопеременно. Инженерный подход к решению задачи максимального быстродействия основан на представлении динамической системы в фазовой плоскости и характере закона, данный подход связывают с именем А.А. Фельдбаума [8].
К сожалению, оптимистические прогнозы относительно первых удач в области поиска решений для известных динамических систем столкнулись с рядом непреодолимых трудностей. Прежде всего, такие трудности вызваны возможностью получения удовлетворительных решений для динамических систем, порядок которых выше второго. Классический пример динамической системы с двумя нулевыми полюсами, называемой в литературе двойным интегратором, имеет ограниченное применение. Реальные системы инерционны, характеризуются запаздываниями, имеют более сложную математическую модель, точные параметры которой могут быть неизвестны, фазовые координаты измеряются с помехами, расчет управляющего воздействия производится с различного рода вычислительными ошибками, в результате чего система может совершать малые колебания в окрестности области цели.
Системы, построенные на принципе управления в фазовом пространстве, обладают более высокой точностью по сравнению с теми, которые построены во временной области, что характерно для замкнутых систем. Следствием такого подхода являются скользящие режимы, которые в общем случае являются нежелательными [7]. Современными исследователями предлагаются различные подходы для преодоления возникающих трудностей. Так в [3], эта задача решается методами обратных задач динамики, приводя исходную сложную модель к модели второго порядка с дальнейшим упрощением, сводя, в конечном счете, ее к модели с законом управления для двойного интегратора. Очевидно, что это может быть применимым в случаях, когда требований к высокой точности динамических систем не предъявляется. Более перспективный подход, развиваемый сравнительно недавно предлагается в работах [9—12], основывается на комбинированном управлении, при котором закон управления состоит из двух частей, каждая из которых работает в своем диапазоне ошибок измерения. При этом импульсный характер управления имеет место в диапазоне больших ошибок, а в диапазоне незначительных ошибок использован пропорциональный закон управления. Это позволяет повысить точность работы системы, а также исключить в реализуемой системе значительных временных затрат на управление и малых колебаний в окрестности области цели [7, 8].
Однако, для систем со сложной динамикой модель двойного интегратора не является пригодной, ввиду наличия ошибок в системах с возможными ускорениями. В задачах, где требуется обеспечить нулевую ошибку при постоянном ускорении при определении закона управления целесообразно использовать модель тройного интегратора. Описание модели тройного интегратора впервые, по нашим данным, было представлено в работе [13], некоторые вопросы управления изучались [2, 5].
Закон управления тройным интегратором с единичным коэффициентом усиления был представлен А.А. Фельдбаумом в работе [8] без каких-либо подтверждений, а с произвольным коэффициентом усиления в работах американских ученых [9, 12]. В этих работах предполагается, что поверхность переключения имеет вид пласта некоторой толщины, в котором закон управления становится пропорционального вида. Некоторые вопросы управления моделью тройного интегратора представлены в [5].
В статье предполагается обобщение работ [5, 8, 9, 12] и новые результаты решения данной задачи для случая, когда коэффициенты тройного интегратора разные в отличие от [9, 12], где интегратор имеет только один коэффициент усиления, область цели имеет вид эллипса, а также исследуются вопросы наиболее существенного влияния помех - по каналам измерения фазовых координат в отличие от [12], где исследован случай наличия возмущений в канале управления.
Постановка задачи. Пусть имеется динамическая система, которая в динамике характеризуется нулевой ошибкой при постоянном ускорении [13]. Схематически эта система представляется цепью трех последовательно соединенных интеграторов и контролера, управляющего этой цепью. Предполагается, что контроллер обеспечивает отработку динамическим объектом требуемой траектории, изменяющейся по линейному закону, т. е.
![]() , (1)
, (1)
где: a>0, b,c³0 известные параметры входной величины. Предполагается также, что начальное состояние динамической системы не совпадает с заданной траекторией движения. Система управления должна обеспечить выход на траекторию и нахождение на ней в пределах времени управления. Для этого контроллер должен сформировать закон управления u(t) с учетом знания выходной величины и ее производных, а также производных входной величины r(t). Схема такой системы может быть представлена на рис. 1.

Рисунок 1. Структура системы с тройным интегратором и шумами в каналах измерения
На рис.1 введены следующие обозначения: r (t) и ![]() — входной и выходной сигналы контроллера, x (t) — представляет выходную величину системы, а
— входной и выходной сигналы контроллера, x (t) — представляет выходную величину системы, а ![]() и
и ![]() — являются первой и второй производными выходной величины. Предполагается, что коэффициенты передачи интеграторов ki не одинаковы, отличны от единицы, известно, что они могут находиться в интервалах
— являются первой и второй производными выходной величины. Предполагается, что коэффициенты передачи интеграторов ki не одинаковы, отличны от единицы, известно, что они могут находиться в интервалах
![]() . (2)
. (2)
Измерение фазовых координат системы xi производится на фоне мешающих шумов, статистическая природа которых либо неизвестна, либо недостаточно времени на их изучение, а известны только уровни Ni, которыми они ограничены, а именно,
![]() , (3)
, (3)
где: ni(t) — шумы в каналах измерения, |ni(t)|£ Nimax.
Тогда система, представленная на рис.1, может быть описана такой системой уравнений
 (4)
(4)
в которой e1, e2, e3 — отклонения выходной величины, ее первой и второй производных от задания соответственно, т. е.
![]() ,
, ![]() ,
, ![]() ;
; ![]() .(5)
.(5)
Для системы (4) считаются заданными начальное состояние e(t0)=e0 в момент времени t0=0, определяемое координатами ![]() , и конечное е(tк)=eк в момент t=tк, где
, и конечное е(tк)=eк в момент t=tк, где ![]() , а W — область достижимости. Для обеспечения требования минимальности времени выхода tmin динамической системы (4) на заданную траекторию (1), т. е. Dt = (tк–t0) = min и
, а W — область достижимости. Для обеспечения требования минимальности времени выхода tmin динамической системы (4) на заданную траекторию (1), т. е. Dt = (tк–t0) = min и ![]() будем рассматривать (4) как терминальную динамическую систему с минимальным временем перехода в конечное состояние.
будем рассматривать (4) как терминальную динамическую систему с минимальным временем перехода в конечное состояние.
В статье ставится и решается задача синтеза закона управления динамической системой (4), представляющей последовательность трех интеграторов с коэффициентами передачи ki, заданными соотношениями (2), по информации об отклонениях измерения фазовых координат системы (3), (5) в условиях ограниченных помех.
Управление с полностью известными параметрами. Для обеспечения минимальности времени управления в случае известных параметров системы задачу управления следует рассматривать как оптимальную по быстродействию. Закон оптимального управления объектом (4), обеспечивающий заданную динамику системы без помех, выбирается в форме
 (6)
(6)
В уравнении (6) приняты обозначения
![]() , (7)
, (7)
![]() , (8)
, (8)
![]() , (9)
, (9)
![]() , (10)
, (10)
а коэффициенты с1, с2, с3, с4
![]() ,
, ![]() ,
, ![]() ,
, ![]() .(11)
.(11)
Функция f1(e) в пространстве eÎÂ3 представляет гиперповерхность (рис. 2), разделяющую пространство управлений u(e) на два возможных полупространства u+ и u-, т. е. u(e)=u+Èu-. Закон управления (6) обеспечивает движение объекта из состояния е0 в состояние ек=0. В данном случае конечная цель движения объекта — начало координат, точка с координатами (0, 0, 0).
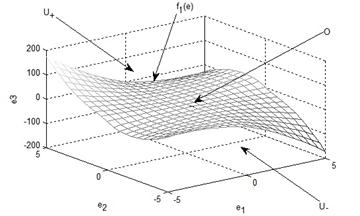
Рисунок 2. Вид функции f1(e) в фазовом пространстве е1, е2, е3
Движение фазовой точки происходит по некоторой кусочно-гладкой траектории, которая ведет объект из произвольной начальной точки заданного фазового пространства в начало координат. Минимальность во времени достигается чередованием знака управляющего воздействия в моменты пересечения гиперповерхности f1(e) и f3. Максимальное число интервалов управления для решения поставленной задачи не превосходит трех, что полностью согласуется с теоремой об n-интервалах А.А. Фельдбаума. Уравнения (6)—(9) совпадают с уравнениями (33)—(35) из [9] в случае, если принять коэффициенты k1=k2=1, а k3=K, как и должно быть.
Управление в условиях помех. Анализ численного решения задачи с использованием ПЭВМ приводит к необходимости учета ошибок квантования и округления, которые имеют место при расчетах на вычислительных машинах с конечной разрядной сеткой, действие которых сводится к появлению бесконечных циклов в окрестности начала координат. Исключение их влияния приводит к необходимости введения в окрестности начала координат некоторой области Wц, где действие управления прекращается, имеет смысл назвать областью достижимости. В [9] предлагается введение области Wц в виде пласта, получаемого смещением поверхности f1(e) по координате e1 на величину e относительно начала координат как в положительную, так и отрицательную стороны, а в [12] область W предлагается представить в виде эллипса
![]() , (12)
, (12)
где: P — положительно-определенная матрица,
k>0 — число, графический вид которого представлен на рис. 3.
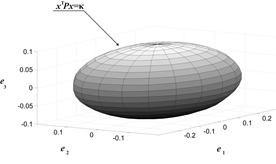
Рисунок 3. Эллипсоидальная область в алгоритме управления
Будем предполагать, что динамика динамической системы с рассматриваемой областью достижимости характеризуется приемлемой точностью, для которой ошибка системы не превышает вычислительную точность системы. Условием успешного решения задачи является необходимость фиксации фазовых координат в эллипсе. Алгоритм фиксации заключается в контроле всех фазовых координат в эллипсе, т. е. если ![]() , где Wц — область достижимости, а значит, цель управления достигнута.
, где Wц — область достижимости, а значит, цель управления достигнута.
В случае, когда движение динамической системы происходит в условиях воздействия помех, динамика объекта управления может существенно изменяться так, что будут происходить ложные смены знака управляющего воздействия контроллером, зацикливание системы управления, что приводит к преждевременному износу исполнительной части системы. Исследования показали, наибольшее воздействие на динамику объекта оказывают помехи ni, где i=1….3 номер канала, возникающие в каналах измерения фазовых координат.
Наибольший интерес у исследователей [4] вызывают помехи, статистическая природа которых априори неизвестна, что имеет место в случаях, когда у исследователя недостаточно времени для изучения ее статистических свойств или же это помеха «играющего» типа [4]. К известной информации следует относить только уровень N, которым эта помеха ограничена. Блокировать действие помехи возможно только лишь в том случае, когда фазовые координаты объекта гарантированно находятся в области определенного знака сигнала управления. Это достигается целенаправленным сдвигом измеренных координат фазовой точки в глубину области действующего в данный момент знака (в сторону от f1(e)) на величину уровня помехи N. При этом сама фазовая точка динамического объекта сдвигается на величину ![]() относительно своего текущего положения. Переключение в этом случае происходит при гарантированном нахождении фазовых координат объекта в области действия другого знака управления. С учетом этого замечания закон управления может быть переписан в виде, в котором значения е(t) фазовых координат в (6) заменяются на их сдвинутые величины
относительно своего текущего положения. Переключение в этом случае происходит при гарантированном нахождении фазовых координат объекта в области действия другого знака управления. С учетом этого замечания закон управления может быть переписан в виде, в котором значения е(t) фазовых координат в (6) заменяются на их сдвинутые величины
![]() . (13)
. (13)
Сдвиги фазовых координат (12) приведут в свою очередь к расширению области W, форма области достижимости та же
![]() (14)
(14)
где: k¢>k.
Модифицированный закон управления. При одновременном удовлетворении показателей системы управления как по времени управления, так и по точности целесообразность в терминальном управлении возникает только лишь при больших отклонениях, когда начальное значение фазовой траектории находится вне области W для приведения фазовой точки в эту область и обеспечения попадания в область достижимости W. Далее задача решается, используя иной закон управления, например, пропорциональный, т. е.
![]() , (15)
, (15)
где: A — вектор коэффициентов.
Если же представить закон управления (6) в области значительных ошибок как uтер, а в области малых (15) как uпр(е), тогда модифицированный закон управления запишется в виде
 (16)
(16)
В (16) W — область переключения (14) и Wц — область достижимости. Отличительной особенностью функционирования алгоритма (16) является наличие алгоритма фиксации попадания объекта в области достижимости (рис. 4). В отличие от предыдущего случая, при котором возникала необходимость только контроля наличия координат, в условиях помех ситуация может быть еще хуже, когда измеренные координаты фазовой точки фиксируются внутри области достижимости Wц, а реальные координаты объекта находятся вне ее. В этом случае будет являться необходимым фиксация участка траектории по нескольким измерениям, т.е. так
![]() . (17)
. (17)
Число таких измерений зависит от длины пути соизмеримого с уровнем помехи, искажающем соответствующие координаты.
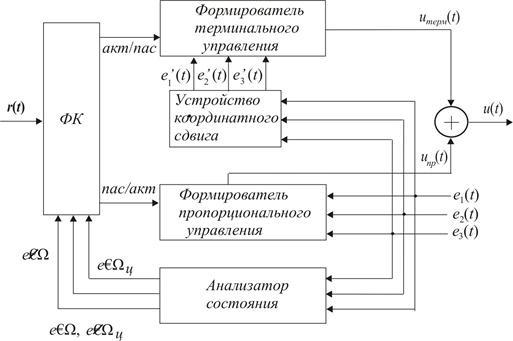
Рисунок 4. Структура контроллера с модифицированным законом управления
На рис.4 представлена структура контроллера с модифицированным законом управления (15), основными элементами которой являются формирователь команд (ФК), формирователь терминального управления, формирователь пропорционального управлении, устройство координатного сдвига, анализатор состояния и сумматор сигналов управления. Контроллер при поступлении задания r(t) выдает команды на перевод соответствующего формирователя в активное состояние, выбор активного состояния определяется анализатором по значениям координат вектора ошибок относительно области цели. После фиксации вектора е(t) в области цели Wц по правилу (17) оба формирователя отключаются.
Моделирование. Для оценки эффективности закона управления (15) проводилось моделирование динамики объекта управления (4) для задающего воздействия (1) в различных начальных условиях вектора e0. Параметры ki объекта выбирались из интервала 0,1£ki£10 таким образом, чтобы общий коэффициент передачи K=k1k2k3 был бы отличен от 1. В демонстрационном примере параметры объекта управления принимались равными
![]() .
.
Отработке подвергалось задающее воздействие с параметрами a=0,1, b=0,5, с=1. Измерение фазовых координат происходит с шумами, уровень ограничения которых в каждом канале |Ni| £0,5. Результаты моделирования выходных координат динамической системы (2) представлены на рис. 5.
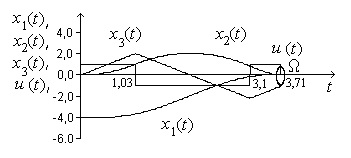
Рисунок 5. Фазовые траектории динамической системы (2) при комбинированном управлении
Сравнение результатов моделирования для ряда испытаний позволяет сделать вывод о достоверности полученных результатов.
Выводы. В статье предложено решение задачи синтеза закона управления динамической системой, движение которой происходит с постоянным ускорением и при наличии ограниченных по уровню помех, действующих на систему по каналам измерения. Модель динамической системы может быть представлена последовательностью трех интеграторов с контроллером, формирующим закон управления в виде (6). В работе показано, что одновременного достижения высоких показателей точности и времени отработки задания возможно при модификации закона управления, включающей замечание (12) и комбинацию (16), (17). Результаты моделирования подтверждают правильность выдвинутых утверждений. Дальнейшие результаты исследований предполагается направить на изучение свойств динамической системы и определения закона управления в условиях, когда уровень ограничения помехи N априори неизвестен.
Список литературы:
1.Болтянский В.Г. Математические методы оптимального управления. — М.: Наука, 1969. — 408 с.
2.Козлов А.И. Полный анализ задачи тройного интегратора / А.И. Козлов, Д.Ю. Муромцев // Автоматика и телемеханика. — 2005. — № 1. — С. 3—12.
3.Крутько П.Д. Алгоритмы терминального управления линейными динамическими системами / П.Д. Крутько // Известия РАН. Теория и системы управления. — 1998. — № 6. — С. 33—45.
4.Кунцевич В.М. Управление в условиях неопределенности: гарантированные результаты в задачах управления и идентификации / Кунцевич В.М. — К.: Наук. думка, 2006. — 264 с.
5.Кучеров Д.П. Алгоритм адаптивного терминального управления тройным интегратором / А.В. Василенко, Б.П. Иванов, Д.П. Кучеров // Вісник Вінницького політехнічного інституту. — 2009. — № 2. — С. 22—27.
6.Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. 4-е изд. — М.: Наука, 1983. — 392 с.
7.Справочник по теории автоматического управления / [под ред. А.А. Красовского]. — М.: Наука, 1987. — 712 с.
8.Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. — М.: Наука, 1971. — 743 с.
9.Kaylon M. Design of continuous time controllers having almost minimum time response // Transactions of the ASME. — 2002. Vol. 124. June. — P. 252—260.
10.Kucherov D.P. Synthesis of adaptive controller for fixed-time control of a spinning body under the presence of bounded noise / D.P. Kucherov // Journal of automation and information science. — 2005. Vol. 37. Issue 1. — P. 29—38. [Электронный ресурс]. — Режим доступа. — URL: www.dl.begellhouse.com/journals/2b6239406278e43e,5aa280c9630a07e4.html (дата обращения: 28.04.13).
11.Kucherov D.P. The synthesis of adaptive terminal control algorithm for inertial secondary order system with bounded noises / D.P. Kucherov // Journal of automation and information science. — 2007. Vol. 39. Issue 9. — P. 16—25. [Электронный ресурс]. — Режим доступа. — URL: http://www.dl.begellhouse.com/journals/2b6239406278e43e,04284c744990a95a.html (дата обращения: 28.04.13).
12.Pao L.Y. Proximate time-optimal control of third-order servomechanisms / Pao L.Y., Franklin G.F. // IEEE Transactions on Automatic Control. — 1993. Vol. 38. № 4. — P. 560—580.
13.Smith О.J.М. Feedback control systems. — New York: McGrowHill, 1958. — 694 p.
дипломов