Статья опубликована в рамках: XXXVIII Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 29 октября 2014 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ДИСКРЕТНОГО КОНТАКТНОГО ВЗАИМОДЕЙСТВИЯ ПРИ ПОМОЩИ АЛЬТЕРНИРУЮЩЕГО МЕТОДА ШВАРЦА
Яковлев Максим Евгеньевич
ассистент кафедры ФН-2, МГТУ им. Н.Э. Баумана, РФ, г. Москва
МATHEMATICAL SIMULATION OF DISCRETE CONTACT INTERACTION USING SWARTZ ALTERATING METHOD
Maxim Yakovlev
assistant, Moscow State Technical University, Russia, Moscow
Аннотация
В работе рассмотрены особенности построения алгоритма численного решения контактных задач механики деформируемого твёрдого тела в сложных двухмерных областях при точечном контакте. Решение построено в рамках конечно-элементной технологии на основе альтернирующего метода Шварца. Метод состоит в попеременном выполнении на контактной поверхности силовых и кинематических граничных условий. Проведён анализ напряжённо-деформированного состояния двух упругих пластин, имеющих дискретный контакт, с различным числом контактных точек.
ABSTRACT
The paper discusses the features of the algorithm of numerical solution of point contact problems of solid mechanics in a complex two-dimensional fields. The solution is constructed in the framework of finite element technology based on the Schwarz alternating method. The method consists of alternating between fulfilling the power and the kinematic boundary conditions on the contact surface. The stress-strain state of the discrete contacted elastic sheets with different number of contact points is analyzed.
Ключевые слова : контактное взаимодействие упругих тел; метод Шварца; метод конечных элементов; точечный контакт; итерационное решение.
Keywords : Contact interaction of elastic bodies; the Schwartz method; finite element method; discrete contact; the iterative solution.
Многие ответственные узлы и элементы конструкций объектов энергетического оборудования, авиационной, аэрокосмической, наземной и морской транспортной техники работают в условиях контактного взаимодействия. Для правильной оценки их ресурса и надежности необходимо знать напряженно-деформированное состояние, которое можно определить, решив соответствующую контактную задачу. Таким образом, контактные задачи являются одними из центральных в механике деформируемого твердого тела, так как контакт — это основной метод приложения нагрузок к деформируемому телу, кроме того, концентрация напряжений в зоне контакта часто инициирует разрушение материала.
Весьма перспективным для решения контактных задач является применение альтернирующего метода Шварца, основанном на принципе поочередности. Преимущества этого метода состоят в том, что не требуется согласовывать построение узлов конечно-элементных моделей на поверхностях контакта и переформировывать матрицы систем линейных алгебраических уравнений в процессе итерационного уточнения границ зон контакта.
Математическая формулировка контактной задачи теории упругости включает: уравнения равновесия
![]()
![]() ; (1)
; (1)
граничные условия
![]()
![]() ; (2)
; (2)
![]()
![]() ; (3)
; (3)
соотношения Коши
![]()
![]() ; (4)
; (4)
и определяющие уравнения в форме закона Гука
![]() (5)
(5)
здесь D — матрица Гука, ![]() — вектор напряжений,
— вектор напряжений, ![]() — вектор деформации,
— вектор деформации, ![]() — вектор начальной деформации (например, обусловленной температурным воздействием)
— вектор начальной деформации (например, обусловленной температурным воздействием) ![]() — вектор заданных перемещений точек поверхностей
— вектор заданных перемещений точек поверхностей ![]() ,
, ![]() — компоненты распределенной нагрузки
— компоненты распределенной нагрузки ![]() на поверхностях
на поверхностях ![]() .
.
Кроме того, во всех контактных точках ![]() должны быть выполнены условия контактного взаимодействия: кинематическое
должны быть выполнены условия контактного взаимодействия: кинематическое
![]() (6)
(6)
и силовое
![]() , (7)
, (7)
где ![]() ,
, ![]() — проекции перемещений граничных точек на внешнюю нормаль к границе тела B;
— проекции перемещений граничных точек на внешнюю нормаль к границе тела B; ![]() — начальное расстояние по нормали между граничными точками;
— начальное расстояние по нормали между граничными точками; ![]() ,
, ![]() — составляющие контактных сил по внешней нормали к границе тела B. Соотношения (6) и (7) соответствуют случаю, когда трение не учитывается.
— составляющие контактных сил по внешней нормали к границе тела B. Соотношения (6) и (7) соответствуют случаю, когда трение не учитывается.
Для решения контактной задачи (1)—(7) был использован алгоритм, основанный на альтернирующем методе Шварца [2—4]. Данный метод является итерационным. Для численного решения задач теории упругости используется метод конечных элементов [1]. Пронумеруем контактные узлы ![]() тела
тела ![]() и соседние с ними поверхностные узлы
и соседние с ними поверхностные узлы ![]() тела
тела ![]() . Введем в рассмотрение векторы —
. Введем в рассмотрение векторы — ![]() и
и ![]() ,
, ![]() , первый из которых составлен из компонент перемещений
, первый из которых составлен из компонент перемещений ![]() и
и ![]() контактных узлов, а второй — из компонент
контактных узлов, а второй — из компонент ![]() и
и ![]() узловых сил тех же узлов.
узловых сил тех же узлов.
В первом шаге на контактных поверхностях тел ![]() и
и ![]() соответственно
соответственно ![]() и
и ![]() задают начальные перемещения
задают начальные перемещения ![]() и
и ![]() , которые имеют смысл дополнительных кинематических условий. Далее решают независимо две подобные задачи теории упругости для тел
, которые имеют смысл дополнительных кинематических условий. Далее решают независимо две подобные задачи теории упругости для тел ![]() и
и ![]() . Затем вычисляют контактные силы
. Затем вычисляют контактные силы ![]() в узлах
в узлах ![]() тела
тела ![]() , а также фиктивные контактные силы
, а также фиктивные контактные силы ![]() и
и ![]() , приложенные в соседних точках тела
, приложенные в соседних точках тела ![]() и вызывающие заданные перемещения. Эти силы заменяют в каждой точке
и вызывающие заданные перемещения. Эти силы заменяют в каждой точке ![]() тела
тела ![]() их суммой
их суммой ![]() и корректируют их так, чтобы выполнялись силовые контактные условия (7), по формуле
и корректируют их так, чтобы выполнялись силовые контактные условия (7), по формуле
 (8)
(8)
здесь ![]() — итерационный параметр,
— итерационный параметр, ![]()
![]() — контактный узел тела
— контактный узел тела ![]() ,
,  — вектор контактных узловых сил сходственной точки
— вектор контактных узловых сил сходственной точки ![]() , лежащей на контактной поверхности
, лежащей на контактной поверхности ![]() тела
тела ![]() . Затем из условий статического равновесия находят скорректированные силы
. Затем из условий статического равновесия находят скорректированные силы ![]() и
и ![]() .
.
Во втором шаге на контактных поверхностях ![]() и
и ![]() задают силовые контактные условия, в качестве которых используют скорректированные узловые контактные силы
задают силовые контактные условия, в качестве которых используют скорректированные узловые контактные силы ![]() и
и ![]() , и вновь решают независимо задачи теории упругости отдельно для тел
, и вновь решают независимо задачи теории упругости отдельно для тел ![]() и
и ![]() . По результатам полученных решений, выполняют коррекцию компонент векторов перемещений
. По результатам полученных решений, выполняют коррекцию компонент векторов перемещений ![]() и
и ![]() соответствующих узлов, чтобы выполнялись кинематические условия контактного взаимодействия (6), по формуле
соответствующих узлов, чтобы выполнялись кинематические условия контактного взаимодействия (6), по формуле
 (9)
(9)
где: ![]() — итерационный параметр,
— итерационный параметр,
![]()
![]() — контактный узел тела
— контактный узел тела ![]() ,
,
 — вектор перемещений сходственной точки
— вектор перемещений сходственной точки ![]() , лежащей на контактной поверхности
, лежащей на контактной поверхности ![]() тела
тела ![]() .
.
Скорректированные перемещения точек контактной поверхности ![]() рассматривают в качестве новых кинематических граничных условий в точках контакта
рассматривают в качестве новых кинематических граничных условий в точках контакта ![]() и вновь решают задачу теории упругости отдельно для тела
и вновь решают задачу теории упругости отдельно для тела ![]() . Перемещения точек тела В берут с предыдущей итерации.
. Перемещения точек тела В берут с предыдущей итерации.
Вопрос выбора итерационных параметров рассматривался, в частности, в работах [2—5]. Пусть для определенности ![]() и
и ![]() . На четных итерациях и нечетных итерациях итерационные параметры
. На четных итерациях и нечетных итерациях итерационные параметры ![]() и
и ![]() соответственно определяются с помощью выражений
соответственно определяются с помощью выражений
 ,
,  (10)
(10)
где: ![]() — норма вектора перемещения
— норма вектора перемещения ![]() узла
узла ![]()
![]() , лежащего на контактной поверхности
, лежащего на контактной поверхности ![]() тела
тела ![]() ,
,
![]() — норма вектора перемещения
— норма вектора перемещения ![]() сходственной точки
сходственной точки ![]() , лежащей на контактной поверхности
, лежащей на контактной поверхности ![]() тела
тела ![]() ,
,
![]() — норма вектора контактных сил
— норма вектора контактных сил ![]() узла
узла ![]() ,
,
![]() — норма вектора контактных сил
— норма вектора контактных сил ![]() сходственной точки
сходственной точки ![]() [4].
[4].
Для иллюстрации приведённого алгоритма рассмотрен контакт двух упругих пластин, одна из которых имеет зубчатую поверхность. Модули Юнга и коэффициенты Пуассона контактирующих тел были приняты равными соответственно ![]() МПа и
МПа и ![]() . Распределённая нагрузка на верхней границе зубчатого тела во всех вариантах равна
. Распределённая нагрузка на верхней границе зубчатого тела во всех вариантах равна ![]() Н/м. Во всех исследованных случаях контактные силы во всех узлах, кроме крайних, отличаются друг от друга не более чем на 5 %. Для двух контактных точек силы в левом и правом узле равны соответственно
Н/м. Во всех исследованных случаях контактные силы во всех узлах, кроме крайних, отличаются друг от друга не более чем на 5 %. Для двух контактных точек силы в левом и правом узле равны соответственно ![]() и
и ![]() Н; для трёх в левом, центральном и правом —
Н; для трёх в левом, центральном и правом — ![]() ,
, ![]() и
и ![]() Н; для пяти —
Н; для пяти — ![]() ,
, ![]() и
и ![]() Н; для десяти —
Н; для десяти — ![]() ,
, ![]() и
и ![]() Н. Геометрия деформированных тел приведена на Рис.1 (перемещения увеличены в различном масштабе, правый край пластины не изображается). На Рис. 2 представлен пример распределения напряжений по вертикальной оси.
Н. Геометрия деформированных тел приведена на Рис.1 (перемещения увеличены в различном масштабе, правый край пластины не изображается). На Рис. 2 представлен пример распределения напряжений по вертикальной оси.

Рисунок 1. Геометрия деформированных тел
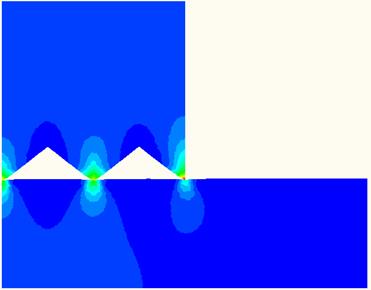
Рисунок 2. Распределение компоненты тензора напряжения
Выводы:
Разработан алгоритм решения дискретных задач на основе альтернирующего метода Шварца и создан комплекс прикладных программ. Выполненный цикл численных исследований дискретного контактного взаимодействия упругих тел, имеющих сложное геометрическое оформление, показал достаточно высокую эффективность разработанного алгоритма и реализующего его программного кода.
Список литературы:
1.Зенкевич О. Метод конечных элементов в технике. М.: Мир, 1975. — 542 с.
2.Можаровский Н.С., Качаловская Н.Е. Приложение методов теории пластичности и ползучести к решению инженерных задач машиностроения: В 2 т. Т. 2: Методы и алгоритмы решения краевых задач. К.: Выща школа, 1991. — 287 с.
3.Станкевич И.В., Яковлев М.Е., Си Ту Хтет. Разработка алгоритма контактного взаимодействия на основе альтернирующего метода Шварца // Вестник МГТУ им. Н.Э. Баумана. Сер. Естественные науки. 2011. Спец. вып. Прикладная математика. — С. 134—141.
4.Станкевич И.В., Яковлев М.Е., Си Ту Хтет. Математическое моделирование контактного взаимодействия упругопластических сред // Наука и образование. 2012. № 4. [Электронный ресурс] — Режим доступа. — URL: http://technomag.edu.ru/doc/353180.html (дата обращения 04.04.2012).
5.Цвик Л.Б. Принцип поочередности в задачах о сопряжении и контакте твердых деформируемых тел. // Прикл. Мех. — 1980 — т. 16, Ш I — С. 13—18.
дипломов