Статья опубликована в рамках: XXXVIII Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 29 октября 2014 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ПОСТРОЕНИЕ ВСТРОЕННОЙ СИСТЕМЫ ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ И ДИАГНОСТИКИ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА БАЗЕ РЕКОНФИГУРИРУЕМЫХ ВЫЧИСЛИТЕЛЬНЫХ СТРУКТУР
Савкин Леонид Васильевич
аспирант ФГУП «НПО им. С.А. Лавочкина», начальник бюро Филиала ФГУП «НПО им. С.А. Лавочкина», РФ, г. Калуга
E -mail: android4.1@mail.ru
THE CREATION OF BUILT -IN SYSTEM OF THE FUNCTIONAL MONITORING AND DIAGNOSTICS OF THE ONBOARD COMPLEX OF CONTROL THE SPACECRAFT ON THE BASIS OF RECONFIGURABLE COMPUTING STRUCTURES
Leonid Savkin
post-graduate student, chief of bureau, The Branch of Federal Enterprise “Lavochkin Association”, Russia, Kaluga
АННОТАЦИЯ
Предложен способ повышения эффективности диагностического обеспечения бортовых комплексов управления космических аппаратов с помощью реконфигурируемых вычислительных систем. Приведена структурная схема встроенной диагностической подсистемы бортового комплекса управления с реконфигурируемыми блоками. Приведен пример распределения ресурсов реконфигурируемого вычислительного поля для решения задач диагностики бортового комплекса управления.
ABSTRACT
The method of increase efficiency of diagnostic support for onboard complexes to control the spacecraft’s by means of reconfigurable computing systems is offered. The skeleton diagram of the built-in diagnostic subsystem with reconfigurable units is provided. The example of distribution resources of a reconfigurable computing field for the solution tasks of onboard diagnostics is given.
Ключевые слова: бортовой комплекс управления; диагностика; реконфигурация; программируемая логическая интегральная схема (ПЛИС).
Keywords: onboard complex of control; diagnostics; reconfiguration; field-programmable gate array (FPGA).
Задача повышения эффективности методов и средств диагностирования бортовых комплексов управления (БКУ) космических аппаратов (КА) является важнейшей составляющей обеспечения безотказного функционирования систем КА и его надежности в целом. Возможность оперативной оценки состояния подсистем БКУ определяет способность комплекса своевременно изолировать неисправный элемент или участок схемы для того, чтобы посредством реконфигурации произвести восстановление работоспособности БКУ.
С ростом сложности аппаратно-программного построения БКУ КА, соответствующим образом усложняется и штатное программно-алгоритмическое обеспечение бортовых систем контроля и диагностики (СКД).
Однако, не смотря на широкое разнообразие существующих сегодня алгоритмов штатного диагностического обеспечения и способов их аппаратно-программных реализаций, некоторые сбои и неисправности, возникающие в аппаратуре БКУ, не всегда удается локализовать с высокой степенью точности. Это связано как с особенностями построения сложных элементов и подсистем БКУ, таких как, например, бортовая цифровая вычислительная машина (БЦВМ), так и с характером неисправностей, возникающих в результате воздействия внешних факторов, характерных условиям эксплуатации КА.
Специфика некоторых сложных типов аппаратных и программных отказов, возникающих в высокоинтегрированных элементах БКУ (микропроцессоры (МП), микроконтроллеры (МК), программируемые логические интегральные схемы (ПЛИС) и т. п.) и необходимость в их высокой степени локализации, могут потребовать от СКД глубокого перестроения диагностической модели или введения дополнительного аппаратного элемента в состав БКУ, что не всегда может быть осуществлено с помощью известных на сегодняшний день программных СКД.
Исследуя различные подходы по практической реализации бортовых многофункциональных СКД, рассматривается возможность аппаратного выделения СКД из состава бортового программно-алгоритмического обеспечения (ПАО) БЦВМ и использования ее в качестве самостоятельной встроенной подсистемы БКУ.
На рисунке 1 представлена структурная схема предлагаемой встроенной диагностической подсистемы БКУ, в которой в качестве элементов, повышающих эффективность диагностического обеспечения БКУ, применены реконфигурируемые блоки, построенные на базе единой реконфигурируемой вычислительной структуры (РВС).
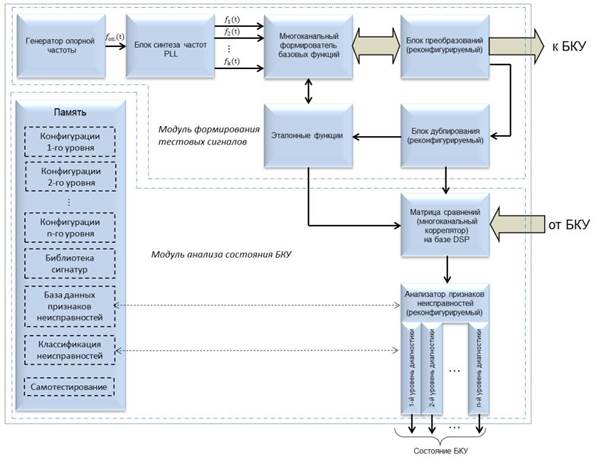
Рисунок 1. Структурная схема встроенной диагностической подсистемы БКУ КА с реконфигурируемыми блоками
В представленной диагностической подсистеме БКУ можно выделить три реконфигурируемых блока, два из которых (блок преобразований и блок дублирования) входят в состав модуля тестовых сигналов, а третий (анализатор признаков неисправностей) является составной частью модуля анализа состояния БКУ.
В модуль формирования тестовых сигналов также входят генератор опорной частоты и блок синтеза частот (PLL), который может входить в состав большинства ПЛИС в качестве дополнительного функционального устройства.
Многоканальный формирователь базовых функций совместно с блоком эталонных функций осуществляют выдачу тестовых сигналов по нескольким каналам в реконфигурируемый блок преобразований, где происходит окончательное формирование тестовых сигналов с последующей их выдачей во входные контрольные точки БКУ.
Реконфигурируемый блок дублирования служит для создания фрагментов диагностируемой аппаратуры БКУ, с целью проведения диагностики методом дублирования и тестирования ПАО. Реконфигурационный и вычислительный ресурсы блока дублирования должны быть рассчитаны таким образом, чтобы можно было осуществлять формирование сложных элементов БКУ, включая процессорные ядра БЦВМ, цифровые сигнальные процессоры (DSP) и устройства памяти, пополняя, при необходимости, наборы эталонных функций, что бы сократить общее время формирования тестовых и проверочных сигналов СКД.
Матрица сравнений, представляет собой многоканальный коррелятор, в котором происходит сравнение диагностической информации, поступающей от выходных контрольных точек БКУ с эталонными (номинальными) признаками исправного состояния диагностируемых элементов. Результаты сравнения диагностируемой и эталонной информации с корреляционной матрицы поступают в реконфигурируемый анализатор признаков неисправностей, где происходит выявление признаков неисправностей аппаратуры БКУ для каждого из аппаратных диагностических уровней.
Матрицу сравнений (многоканальный коррелятор) предлагается выполнить на базе сигнального процессора (DSP), которые входят в состав большинства современных ПЛИС. В то же время, анализатор признаков неисправностей предлагается реализовать на базе РВС, что обеспечит возможность корректировки расстояний между точками в пространстве состояний диагностируемого объекта, и, тем самым, позволит менять решающее правило, с помощью которого предъявленная (диагностируемая) совокупность признаков соотносится к одному из возможных состояний БКУ. Данная возможность особенно важна, когда необходимо поменять диагностическую модель, адаптируя диагностическую подсистему под сложные типы неисправностей БКУ.
В состав диагностической системы входят также модули памяти, хранящие информацию о штатных (известных) аппаратных конфигурациях диагностических моделей для каждого из реконфигурируемых блоков. В памяти содержится библиотека сигнатур, необходимая для проведения диагностики методом сигнатурного анализа.
Помимо этого, данная память обеспечивает хранение признаков неисправностей БКУ и классификатора аппаратно-программных неисправностей, которые в процессе работы диагностической системы могут пополняться как новыми признаками неисправностей БКУ, так и соответствующими им категориями и классами неисправностей и отказов.
На рисунке 2 показан вариант распределения диагностических задач в едином реконфигурируемом вычислительном поле, которое возможно реализовать на одной современной ПЛИС FPGA с соответствующими для данной задачи характеристиками.
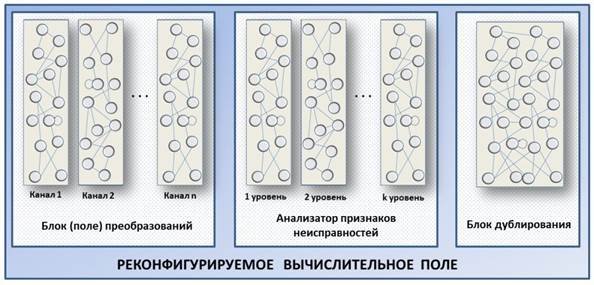
Рисунок 2. Распределение диагностических задач в едином реконфигурируемом вычислительном поле
Здесь показано, что блок преобразований, анализатор признаков неисправностей и блок дублирования входят в состав единого вычислительного поля. Каждому из каналов блока преобразований соответствует свой реконфигурируемый участок, а анализатор признаков неисправностей, в свою очередь, делится на отдельные фрагменты, каждый из которых отведен для анализа признаков неисправностей на соответствующем уровне аппаратной диагностики.
Любая часть алгоритма диагностической модели СКД, реализуемая посредством РВС может быть представлена в виде графа![]() , вершинами которого являются базовые функциональные блоки
, вершинами которого являются базовые функциональные блоки ![]() , реализуемые посредством коммутируемых логических блоков (КЛБ) ПЛИС, где
, реализуемые посредством коммутируемых логических блоков (КЛБ) ПЛИС, где ![]() — порядковый номер КЛБ-вершины, а
— порядковый номер КЛБ-вершины, а ![]() — базовая арифметико-логическая функция, многократно перестраиваемая за счет программы и зависящая от характеристик используемого типа ПЛИС. Дуги
— базовая арифметико-логическая функция, многократно перестраиваемая за счет программы и зависящая от характеристик используемого типа ПЛИС. Дуги ![]() графа
графа ![]() определяют направление и последовательность вычислительных операций внутри графа от
определяют направление и последовательность вычислительных операций внутри графа от ![]() -ой КЛБ-вершины к
-ой КЛБ-вершины к ![]() -ой КЛБ-вершине, т. е. пошагово определяют алгоритм вычислений на основе базовых арифметико-логических функций реконфигурируемого вычислительного поля ПЛИС.
-ой КЛБ-вершине, т. е. пошагово определяют алгоритм вычислений на основе базовых арифметико-логических функций реконфигурируемого вычислительного поля ПЛИС.
В качестве критерия оптимальности диагностических алгоритмов можно применять минимум средних потерь (например, минимум среднего времени поиска дефектных состояний) [4, с. 73]:
![]() ,
,
где: ![]() — затраты, связанные с проведением проверок, требуемых при поиске
— затраты, связанные с проведением проверок, требуемых при поиске ![]() состояния;
состояния;
![]() — вероятность
— вероятность ![]() -го состояния,
-го состояния,
![]() — число состояний объекта диагностирования, т. е. БКУ.
— число состояний объекта диагностирования, т. е. БКУ.
В нашем случае, ввиду того, что некоторые элементы диагностической подсистемы БКУ будут реконфигурируемыми, одним из аргументов функции ![]() будет являться параметр
будет являться параметр ![]() , где
, где ![]() — затраты, связанные с приведением блока преобразований к конфигурации
— затраты, связанные с приведением блока преобразований к конфигурации ![]() ,
, ![]() — общее число возможных конфигураций блока преобразований;
— общее число возможных конфигураций блока преобразований; ![]() — затраты, связанные с приведением анализатора признаков неисправностей к конфигурации
— затраты, связанные с приведением анализатора признаков неисправностей к конфигурации ![]() ,
, ![]() — общее число возможных конфигураций анализатора признаков неисправностей;
— общее число возможных конфигураций анализатора признаков неисправностей; ![]() — затраты, связанные с приведением блока дублирования к конфигурации
— затраты, связанные с приведением блока дублирования к конфигурации ![]() ,
, ![]() — общее число возможных конфигураций блока дублирования.
— общее число возможных конфигураций блока дублирования.
Т. о., каждый из участков реконфигурируемого вычислительного поля может кардинальным образом менять свою конфигурацию, меняя, тем самым, диагностические модели СКД в процессе идентификации состояния БКУ.
Кроме того, возможность дублирования элементов аппаратуры БКУ позволяет в крайних случаях использовать аппаратно-вычислительный диагностический ресурс для восстановления вышедших из строя элементов, если это предусмотреть на этапе разработки диагностического и функционального обеспечения БКУ.
Предложенный вариант диагностической системы БКУ позволит повысить эффективность диагностического обеспечения БКУ, поскольку в отличие от программных СКД, способен менять диагностические модели на низких аппаратных уровнях, обеспечивая тем самым высокую гибкость диагностических алгоритмов и их адаптацию к сложным видам неисправностей и отказов, которые могут возникнуть в БКУ.
Выводы:
1. Предложен способ повышения эффективности диагностического обеспечения БКУ КА за счет использования свойств РВС:
· высокая гибкость диагностических алгоритмов путем адаптации РВС к информационной структуре задач бортового диагностирования БКУ;
· возможность перестраивания и создания новых диагностических моделей СКД БКУ КА на базе одного аппаратно-вычислительного ресурса РВС;
· возможность осуществлять диагностику сложных элементов БКУ КА методом дублирования, создавая эквивалентную вычислительную аппаратуру дублирования непосредственно на борту КА.
2. Приведена структурная схема встроенной диагностической подсистемы БКУ КА с реконфигурируемыми блоками;
3. Свойства встроенной диагностической подсистемы БКУ КА можно использовать для восстановления отдельных элементов БКУ, если это предусмотреть на этапе проектирования и разработки функционального и диагностического обеспечения БКУ.
Список литературы:
1.Алексеев А.А., Кораблев Ю.А., Шестопалов М.Ю. Идентификация и диагностика систем. М.: Издательский центр «Академия», 2009. — 352 с.
2.Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. и др. Бортовые системы управления космическими аппаратами. /Под ред. проф. А.С. Сырова М.: Изд-во МАИ-ПРИНТ, 2010.— 304 с.
3.Глущенко П.В. Техническая диагностика: Моделирование в диагностировании и прогнозировании состояния технических объектов. М.: Вузовская книга, 2004. — 248 с.
4.Иванов Ю.П., Никитин В.Г., Чернов В.Ю. Контроль и диагностика измерительно-вычислительных комплексов: Учеб. Пособие/СПбГУАП. СПб., 2004. — 98 с.
5.Каляев А.В. Многопроцессорные системы с программируемой архитектурой. М.: Радио и связь, 1984. — 240 с.
6.Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые мультиконвейерные вычислительные структуры /Изд. 2-е, перераб. и доп. / Под общ. Ред. И.А. Каляева. Ростов-н/Д.: Изд-во ЮНЦ РАН, 2009. — 344 с.
дипломов