Статья опубликована в рамках: XI Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 15 августа 2012 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции, Сборник статей конференции часть II
- Условия публикаций
- Все статьи конференции
дипломов

АДАПТИВНЫЙ ПРИВОД ДЛЯ ШАССИ САМОЛЕТА
Шугаев Геннадий Алесеевич
канд. техн. наук, начальник проектно-конструкторского отдела,
Восточно-Казахстанский государственный университет им. С. Аманжолова, г. Усть-Каменогорск, Республика Казахстан.
E-mail: gashugayev@gmail.com
ADAPTIVE DRIVE FOR AIRCRAFT CHASSIS
Gennadiy Shugayev
Candidate of technical science, head of a design department at S. Amanzholov East Kazakhstan State University, Ust-Kamenogorsk, Kazakhstan.
АННОТАЦИЯ
Рассмотрены вопросы по применению адаптивных вибрационных приводов в авиационной промышленности
ABSTRACT
Issues of adaptive vibration drive application in aviation industry have been considered
Ключевые слова: адаптация; машиностроение; привод.
Keywords: adaptation; machine-building; drive.
Главное требование к приводам, применяемым в авиационной технике — это надежность и безотказность в работе.
Однако большинство используемых в настоящее время приводов не обладают эффектом силовой адаптации, способностью приспосабливаться к нестандартным условиям работы, связанным с возможными затруднениями из-за отклонений от норм эксплуатации. А известные используемые приводы, начиненные сложной электронной аппаратурой контроля (преобразователями частоты) не имеют той надежности в трудных условиях работы, по сравнению с полностью механическим адаптивным механизмом, у которого все зубья находятся в постоянном зацеплении. Главный недостаток существующих приводов — это «жесткая» связь двигателя с исполнительным рабочим органом через передаточный механизм с одной степенью свободы. В этом случае незначительная помеха в движении рабочего органа вызывает поломку механизма привода.
В последнее время развивается научно-техническое направление использования адаптивных приводов машин [3, 2, 4]. Адаптивный привод включает двигатель и передаточный механизм с двумя степенями свободы. Адаптивный передаточный механизм в виде зубчатого вариатора приводит в движение исполнительный рабочий орган со скоростью, обратно — пропорциональной внешней нагрузке при постоянной мощности двигателя. Это означает, что даже при наличии помехи в движении рабочего органа, поломка привода не произойдет. Двигатель может передавать движение на передаточный механизм даже при полной остановке рабочего органа. Условия пуска такого механизма допускают значительное увеличение пускового усилия за счет малой пусковой скорости рабочего органа при постоянной мощности двигателя. Кроме того, чтобы обеспечить начало движения рабочего органа (при наличии помехи) для промышленных приводов техники предлагается в механизме привода использовать условия вибрационного воздействия на рабочий орган, во много раз увеличивающие надежность трогания с места. Для этого в механизм привода вводим упругие звенья.
Зубчатый адаптивный вариатор (рис. 1) содержит входное водило ![]() , входной сателлит 2, блок центральных зубчатых колес с внешними зубьями 1—4, блок центральных зубчатых колес с внутренними зубьями 3—6, выходной сателлит 5 и выходное водило
, входной сателлит 2, блок центральных зубчатых колес с внешними зубьями 1—4, блок центральных зубчатых колес с внутренними зубьями 3—6, выходной сателлит 5 и выходное водило ![]() .
.
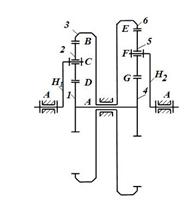
Рис. 1. Зубчатый адаптивный вариатор
Взаимосвязь кинематических и силовых параметров механизма (дифференциальная связь) определяется по принципу возможных работ (или мощностей)
![]() , (1)
, (1)
где ![]() — угловые скорости звеньев
— угловые скорости звеньев![]() , 1, 3,
, 1, 3, ![]() ,
,
![]() — входной активный движущий момент на водиле
— входной активный движущий момент на водиле ![]() и выходные внешние пассивные моменты сопротивления на звеньях 1, 3,
и выходные внешние пассивные моменты сопротивления на звеньях 1, 3,![]() .
.
Для входного и выходного дифференциалов взаимосвязь кинематических и геометрических параметров (геометрическая связь) с учетом ![]() определяется формулами:
определяется формулами:
 , (2)
, (2)
 , (3)
, (3)
где ![]() ,
, ![]() - передаточные отношения, выражаемые через числа зубьев колес 3, 1 и 6, 4.
- передаточные отношения, выражаемые через числа зубьев колес 3, 1 и 6, 4.
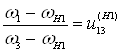
Для зубчатого вариатора с одним входом и одним выходом (при внешних моментах ![]() ) уравнение (1) примет вид
) уравнение (1) примет вид
![]() . (4)
. (4)
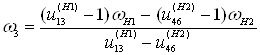
Из формулы (4) следует
![]() . (5)
. (5)
Формула (5) отражает эффект силовой адаптации: при заданной постоянной входной мощности с параметрами ![]() выходная угловая скорость обратно пропорциональна заданному переменному моменту сопротивления
выходная угловая скорость обратно пропорциональна заданному переменному моменту сопротивления ![]() .
.
Решая систему уравнений (2), (3), определим угловые скорости колес 1, 3.
 . (6)
. (6)
![]() . (7)
. (7)
Трогание рабочего органа с места происходит при неподвижном положении выходного вала зубчатого вариатора (водила ![]() ) в состоянии с одной степенью свободы. В момент трогания (начала движения) сателлит 5, размещенный на неподвижном выходном водиле, является выходным звеном. Чтобы выходной сателлит 5 передавал усилие от входа (водила
) в состоянии с одной степенью свободы. В момент трогания (начала движения) сателлит 5, размещенный на неподвижном выходном водиле, является выходным звеном. Чтобы выходной сателлит 5 передавал усилие от входа (водила ![]() ) на неподвижное водило
) на неподвижное водило![]() , он должен иметь сопротивление движению. Усилие от входа передается на две точки сателлита 5 в виде двух пассивных не равных по величине реакций со стороны колес 4 и 6. Сумма этих двух реакций определяет силу, передаваемую со стороны сателлита 5 на неподвижное выходное водило
, он должен иметь сопротивление движению. Усилие от входа передается на две точки сателлита 5 в виде двух пассивных не равных по величине реакций со стороны колес 4 и 6. Сумма этих двух реакций определяет силу, передаваемую со стороны сателлита 5 на неподвижное выходное водило ![]() и преодолевающую момент сопротивления
и преодолевающую момент сопротивления ![]() при трогании с места. Механизм всегда имеет внутренний момент трения между всеми звеньями, который приводится к сателлиту 5. При всей малости этого внутреннего момента трения он способен обеспечить передачу требуемого усилия трогания с места выходного водила, поскольку он уравновешивает не сами реакции, а их разность.
при трогании с места. Механизм всегда имеет внутренний момент трения между всеми звеньями, который приводится к сателлиту 5. При всей малости этого внутреннего момента трения он способен обеспечить передачу требуемого усилия трогания с места выходного водила, поскольку он уравновешивает не сами реакции, а их разность.
Выполненные научные исследования позволяют создать простой и надежный адаптивный привод для авиационной промышленности, в частности для устройства безаварийного выпуска шасси самолета.
Привод шасси самолета (рисунок 2) содержит двигатель Д, передаточный механизм П и исполнительный механизм. Исполнительный механизм включает винтовой гидравлический насос 1, гидравлический распределитель 2, клапанную коробку 3, силовые цилиндры 4, поршни 5, механизмы шасси 6.
Винтовой гидравлический насос 1 приводится в движение передаточным адаптивным вибрационным зубчатым механизмом. Он подает жидкость из бака через гидравлический распределитель 2 и клапанную коробку 3 в полости А силовых цилиндров 4. Вибрационное движение выходного вала передаточного механизма передается на винтовой гидравлический насос. Жидкость, приводящая в движение поршни 5, воздействует на них посредством гидравлических импульсов. Поршни 5 при этом перемещаются, осуществляя вибрационное воздействие на механизм шасси.
Разработано изобретение «Устройство передачи энергии с непрерывно переменным передаточным отношением», которое используется для создания вибрационного воздействия на рабочий орган и повышает эффективность, нагрузочную способность и надежность привода [1].
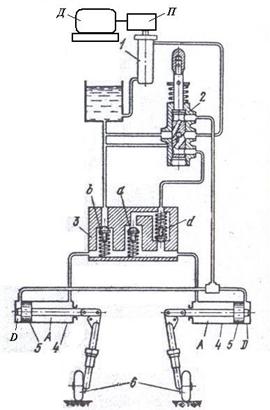
Рис. 2 — Привод шасси самолета
Список литературы:
1.Иванов К.С., Ярославцева Е.К., Шугаев Г.А. Устройство передачи энергии с непрерывно переменным передаточным отношением. Патент РК № 24625.
2.Шугаев Г.А. Новые материалы и технологии в машиностроении // Под общей редакцией К.А. Панфилова. Сборник научных трудов по итогам международной научно-технической конференции. Выпуск 15. — Брянск: БГИТА, 2012. С. 167—173.
3.Ivanov K.S. Discovery of the Force Adaptation Effect. // Proceedings of the 11th World Congress in Mechanism and Machine Science. V. 2. April 1—4, 2004, Tianjin, China, p. 581—585.
4.Shugayev G.A. Development of a gear stepless box with a clutch of ganging. // Proceedings of the 3rd International conference “Power transmissions 2009”. - Kallithea, Greece, — 2009. — С. 579—584.