Статья опубликована в рамках: XXXVII Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 24 декабря 2015 г.)
Наука: Информационные технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ЭМУЛЯТОР ДЛЯ ОБУЧЕНИЯ УПРАВЛЕНИЕМ КВАДРОКОПТЕРОМ В СРЕДЕ ГРАФИЧЕСКОГО ПРОГРАММИРОВАНИЯ LABVIEW
Корсиков Игорь Александрович
студент 3 курса, кафедры «Информационных и измерительных технологий» ЮФУ,
РФ, г. Ростов-на-Дону
E-mail: igor-kors@mail.ru
Рябошапко Борис Валентинович
научный руководитель, канд. техн. наук, доцент кафедры «Информационных и измерительных технологий» ЮФУ,
РФ, г. Ростов-на-Дону
E-mail: rbv2.7182@gmail.com
Мультикоптер – летательный аппарат с несколькими несущими винтами. Наиболее распространенной конструкцией мультикоптера является квадрокоптер. Квадрокоптер – мультикоптер с четырьмя несущими винтами, у которого два противоположных винта вращаются в одном направлении, и два других – в обратном (рис. 1).


Рисунок 1. Квадрокоптер
Основной областью применения аппаратов данного типа является проведение аэрофотосъемки и аэровидеосъемки, а также мониторинг различных объектов (газопроводы, линии электропередач и т. д.), а также экологического контроля параметров окружающей среды с использованием дополнительного оборудования на борту [2]. Имея небольшой размер, квадрокоптеры могут выполнять полет в условиях ограниченного пространства, а также в местах, нахождение в которых представляет угрозу для жизни человека. Большое значение придается использованию мультикоптеров в военных целях.
Управление квадрокоптером осуществляются путем изменения скорости вращения винтов. Как объект управления квадрокоптер является сложный многоканальной существенно нелинейной динамической системой. Известны работы, которые посвящены разработке математических моделей квадрокоптеров и алгоритмов управления ими [2; 3; 5]. Сложность разработки моделей заключается в том, что квадрокоптер имеет шесть степеней свободы, в то время как управлять мы можем всего четырьмя параметрами: скоростями вращения винтов.
Для того, чтобы уяснить принципы управления полетом квадрокоптера (в дальнейшем объекта управление (ОУ)) можно указать два пути. Первый заключается в том, чтобы попытаться понять суть проблемы управления путем решения системы дифференциальных уравнений, описывающих движение ОУ [1; 2; 3; 5]. Это сложный путь, требующий знания теоретической механики, динамики полета, и высшей математики. Второй путь – это путь, по которому идет ребенок, который учится кататься на велосипеде. Или бизнес-леди, которая учится водить автомобиль. Ни в первом, ни во втором случае обучаемый понятия не имеет о математической модели велосипеда и автомобиля. Тем более, что некоторые математические модели объектов на настоящий момент времени еще до конца не разработаны. Тем не менее, через определенное время (у каждого свое) человек уже получает первоначальные навыки управления сложным динамическим объектом. Можно выделить основные этапы второго пути.
1. Общее знакомство с объектом управления, которым человек хочет научиться управлять. Чаще всего это делает инструктор, специалист по управлению этим объектом.
2. Более глубокое теоретическое изучение объекта управления.
3. Получение первичных практических навыков на тренажере (физическом или виртуальном эмуляторе) объекта управления.
4. Закрепление и совершенствование навыков управления реальным объектом.
Основной целью данной статьи является практическая реализация второго пути на основе разработки виртуального эмулятора управления квадрокоптером. Программирование осуществлялось в среде графического программирования LabVIEW, известной своим дружественным интерфейсом [4]. Обучение общим принципам дистанционного управления квадрокоптером на эмуляторе позволит сэкономить время и деньги. Известно много случаев гибели квадрокоптеров при неумелом управлении. А стоят они немалых денег, особенно профессиональные с фото и видео аппаратурой. Немаловажным является и вопрос безопасности оператора и окружающих.
Общая функциональная схема управления квадрокоптером приведена на рис. 2.
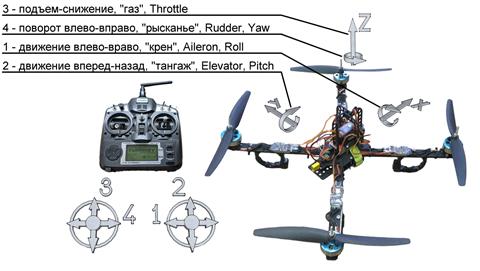
Рисунок 2. Функциональная схема управления квадрокоптером
В соответствии с функциональной схемой разработан эмулятор, позволяющий реализовать управление с помощью двух стиков (рис. 3). В табл. 1 приведены реакции квадрокоптера на отклонения левого и правого стика.
Таблица 1.
Рычаги управления квадрокоптером
Левый стик |
Вверх (Газ) |
Подъем |
Throttle Up |
Вниз (Тормоз) |
Спуск |
Throttle Down |
|
Влево (поворот влево) |
Рысканье , ψ |
Yaw Left |
|
Вправо (поворот вправо |
Рысканье, ψ |
Yaw Right |
|
Правый стик |
Вверх («нос» вверх) |
Тангаж, θ |
Pitch Up |
Вниз («нос» вниз) |
Тангаж, θ |
Pitch Down |
|
Вправо (коптер наклонится в правую сторону) |
Крен, φ |
Rool Right |
|
Влево (коптер наклонится в левую сторону) |
Крен, φ |
Rool Left |
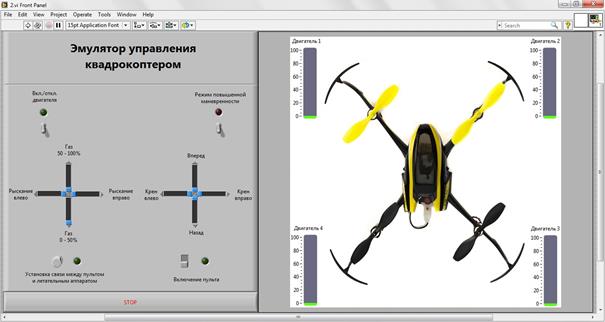
Рисунок 3. Лицевая панель эмулятора
Инструкция по работе с пультом управления. Перед началом управления, необходимо подготовить пульт к работе. Для этого необходимо:
· Переместить тумблер включения в состояние вкл. (загорится зеленый светодиод).
· Установить связь между пультом и квадрокоптером, нажав соответствующую кнопку (после установки связи также загорится зеленый светодиод).
· Переместить тумблер включения двигателей в состояние вкл. (загорится зеленый светодиод).
После вышеперечисленных действий можно приступать к управлению квадрокоптером используя правый и левый стики. На рис. 4а – 4в приведены скриншоты различных режимов полета.

Рисунок 4а. Режим набора высоты

Рисунок 4б. Режим разворота влево с максимальной скоростью
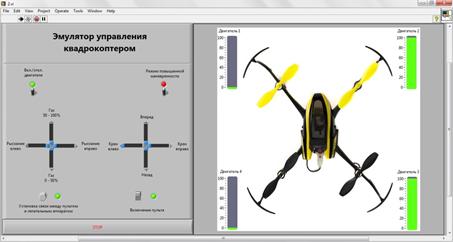
Рисунок 4в. Режим максимального крена влево с включенным режимом повышенной тяги
Разработанный эмулятор является первым шагом к созданию вербальной модели и пониманию физической сущности параметров, входящих в математическую модель квадрокоптера.
Список литературы:
- Гурьянов А.Е. Моделирование управления квадрокоптером. Наука и образование. МГТУ им. Н.Э. Баумана. Электронный журн. 2014, № 8. [Электронный ресурс] – Режим доступа. – URL: http://engbul.bmstu.ru/doc/723331
- Огольников И.И., Рожкин Н.Б., Шеваль В.В. Математическая модель квадрокоптера аэромобильного лидара//Известия ТулГУ. Технические науки. – 2012. – Вып. 1, – с. 47–55.
- Пыркин А.А. и др. Синтез системы управления квадрокоптером с использованием упрощенной математической модели//Изв. ВУЗОВ. Приборостроение. – 2013. – Т. 56, – № 4, – с. 47–55.
- Трэвис Дж., Кринг Дж. LabVIEW для всех. 4-е изд. – М.: ДМК Пресс. 2011.
- Hossein Bolandi and over, Attitude Control of a Quadrotor with Optimization PID Controller//Control and Automatin, 2013, 4, – p. 335–342.
дипломов