Статья опубликована в рамках: XIX Международной научно-практической конференции «Научное сообщество студентов XXI столетия. ТЕХНИЧЕСКИЕ НАУКИ» (Россия, г. Новосибирск, 15 апреля 2014 г.)
Наука: Технические науки
Секция: Машиностроение
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПУЛЬСНЫХ УСКОРЕНИЙ
Башкирова Ирина Алексеевна
студент 3 курса, кафедра технико-технологических дисциплин ВлГУ, РФ, г. Владимир
E -mail: ttd.tef@vlsu.ru
Шарыгин Лев Николаевич
научный руководитель, канд. тех. наук, профессор ВлГУ, РФ, г. Владимир
Для измерения ускорений используют инерционный груз, сопряженный с упругим элементом. В качестве упругого элемента применяют плоские пружины [2], винтовые пружины [1], упругие балки [4]. Преобразование смещения груза осуществляют оптически [2, 4], индуктивным [1] или индукционным [3] преобразованием.

Рисунок 1. Осевой разрез датчика
Однако известные устройства измеряют величину ускорения только в фиксированном направлении. При исследовании сложных объектов в различных режимах направление ускорения может меняться, поэтому возникает задача определения направления действия ускорения.
Предлагаем основные технические решения, реализующие поставленную задачу.
Устройство для измерения импульсных ускорений состоит из двух блоков — датчика и электронного блока.
Датчик содержит чувствительный элемент (первичный преобразователь) в виде груза 1 цилиндрической формы из магнитопроводного материала, который закреплен зачеканкой в средней части натянутой стальной проволоки круглого сечения — растяжки 2. Монтажной основой датчика является корпус 3 цилиндрической формы, к которому снизу (здесь и далее ориентация чертежа) винтами 4 прикручена пластина 5, а сверху также винтами 6 втулка 7, к которой методом закатки по контуру прикреплена мембрана 8, выполняющая функцию пружины для реализации усилия натяжения растяжки. Крепление концов растяжки цанговое. Верхняя цанга 9 развальцовкой закреплена в центральном отверстии мембраны и имеет гайку 10. Нижняя цанга 11 в нижней части имеет хвостовик квадратного сечения, который входит в аналогичное отверстие пластины 5. Нижняя цанга имеет резьбовое отверстие для натяжного винта 12. Пря этой цанге имеется зажимная гайка 13. Предусмотрена гайка 14, блокирующая нарушение исходной настройки натяжения растяжки винтом 12. Сверху мембрана закрыта крышкой 15. На верхней лицевой плоскости крышки изображен стилизованный круг, по которому в кружках проставлены номера катушек вторичного преобразователя от 1 до n. Крышка крепится винтами 16 в однозначном положении, чтобы радиальные направления на одноименные катушки и номера на крышке совпадали.
Вторичное преобразование датчика индукционного типа. Имеется кольцевой постоянный магнит осевой намагниченности 17, снизу которого размещен шайбообразный магнитопровод 18, а сверху — n электрических катушек 9, намотанных на каркасах 20, и n магнитопроводов 21 лепестковой формы. Перечисленные элементы присоединены к корпусу немагнитопроводными (латунь) винтами 22. Электрические выводы катушек с применением кольцевой кроссплаты 23 подключены к разъему 24. В результате в этой конструкции в исходном состоянии образуется n одинаковых магнитных потоков.
При смещении груза перпендикулярно оси растяжки изменится магнитное сопротивление зазоров, что приведет к изменению магнитных потоков Φ. В соответствии с законом электромагнитной индукции Фарадея это приводит к появлению в катушках 16 ЭДС
![]() . (1)
. (1)
Пренебрегая малым по отношению к зазору магнитным сопротивлением магнитопроводов (μ>>μ0) магнитный поток для одного вторичного преобразователя равен
![]() , (2)
, (2)
где: Br — индукция остаточного намагничивания магнита 14;
S — сечение зазора;
l — длинна зазора;
μ0 — магнитная проницаемость вакуума. По магнитным свойствам воздух близок к вакууму.
Величина зазора пропорциональна ускорению a и боковой жесткости С растяжки
![]() (3)
(3)
где: М — масса груза 1.
Заменим постоянные параметры в формулах (2),(3) обобщенным коэффициентом К, получим
![]() . (4)
. (4)
В соответствии с формулой (4) при импульсном ускорении смещение груза 1 приводит к появлению в катушках ЭДС е по форме близкой к фиг.3. В момент времени ty инерционная сила F=m·a будет уравновешена растяжкой и груз
![]() (5)
(5)
остановится. Поскольку в это время импульс ускорения заканчивается, то начинается с ty груз будет смещаться под действием упругости деформированной растяжки обратно к положению равновесия. Далее будем наблюдать затухающие колебания груза, а на катушках — затухающую синусоиду ЭДС (на рис.3 не показано).
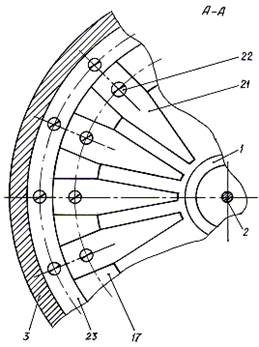
Рисунок 2. Разрез А-А по рис. 1
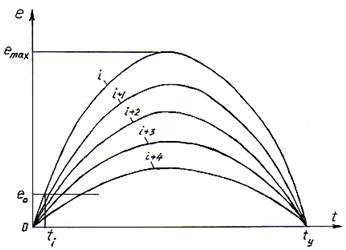
Рисунок 3. Эпюры ЭДС электрических катушек вторичного преобразователя
Принцип работы электронного блока основан на том, что амплитуда и крутизна фронта положительного импульса ЭДС будут тем больше, чем быстрее уменьшается магнитный зазор. Пусть направление измеряемого ускорения направлено радиально по i-ому магнитопроводу 21. Тогда эпюре ЭДС i-ой катушки 19 будет соответствовать верхняя кривая на рис. 3. На части других катушек, в цепи которых магнитные зазоры также уменьшаются, амплитуды и крутизны импульсов ЭДС будут меньше. На другой части катушек, в цепи которых магнитные зазоры увеличиваются, ЭДС будет иметь обратный знак. Задав определенный пороговый уровень e0 по рис. 3 видим, что первой по времени появится ЭДС i-й катушки.
Функциональную схему электронного блока составляют n ограничителей уровня 25 ЭДС катушек 19 датчика. Выходы ограничителей подключены к установочным входам входных RS триггеров 26, вторые входы которых образуют шину сброса, управляемую кнопкой 27. Прямые выходы RS триггеров являются входами n-входового логического элемента ИЛИ 28, выход которого соединен с измерителем амплитуды 29, имеющем m выходов. Каждый из выходов измерителя амплитуды через вторые RS триггеры 30 соединен со входами шифратора 31, а выход последнего подключен к цифровому табло индикатора 32. Индикатор кроме цифрового табло содержит изображение круга по типу как на крышке 15 датчика с номерами и светодиодами 33. Светодиоды управляются соответствующими выходами RS триггеров 26. Имеется общий блок питания 34. В конкретной реализации электронного блока может оказаться, что светодиоды 33 индикатора 32 требуют другого уровня питания, чем основные микросхемы Uм, тогда следует в цепь управления светодиодов включить n электронных ключей 35 и повысить напряжение питания до уровня Uu. Аналогично для согласования амплитуды ЭДС датчика с уровнем питания измерителя амплитуды 29 следует включить в функциональную схему электронного блока электронный ключ 36, на выходе которого вместо уровня логической единицы Uм будет уровень U0 источника питания. Измеритель амплитуды предназначен для выявления максимального (амплитудного) значения измеряемого импульсного ускорения. Имеется делитель R1…Rm из одинаковых резисторов. Опорное напряжение питания делителя выбирают из условия U0>>emax, где emax — максимально возможная ЭДС одной из катушек 19 датчика на верхнем пределе диапазона измерения amax рассматриваемого устройства. Число резисторов делителя m определяет шаг дискретности ΔU=U0/m выходного сигнала. Имеется m компараторов 29а. В соответствии с функцией компаратора на его выходе появятся логическая единица при условии Ui+1<emax<Ui , где Ui+1 и Ui соответственно потенциалы относительно общей шины на резисторах Ri+1 и Ri .
Шифратор 31 электронного блока формирует из логической единицы с выходов RS триггеров 30 цифровой позиционный код для цифрового табло индикатора в соответствии с используемой микросхемой. Например, пусть логической единице на выходе i-го триггера 30 соответствует значение амплитуды ускорения 634 м/с2.
Работает устройство для измерения импульсных ускорений следующим образом. Устанавливают на объекте исследования датчик устройства таким образом, чтобы неизвестное по амплитуде и направлению ускорение было в плоскости перпендикулярной оси датчика, т. е. в плоскости перпендикулярной растяжке. Измеряемое при этом ускорение смещает груз 1, при этом будут изменяться зазоры между грузом, шайбообразным магнитопроводом 18 и лепестковыми магнитопроводами 21. Изменение зазоров приведет к изменению магнитных потоков постоянного магнита 17, пронизывающих витки электрических катушек 19. В катушках будет индуцироваться ЭДС в соответствии с формулой (1). На части катушек, где зазор уменьшается, ЭДС будет иметь положительный знак, на другой части отрицательный. Максимальный по амплитуде положительный импульс появится на той катушке, при которой зазор уменьшается наиболее быстро. Это радиальное направление и будет направлением действия измеряемого ускорения. Данному импульсу ЭДС соответствует и наибольшая крутизна переднего фронта, следовательно, на некотором уровне e0 по времени он будет первым — см. рис. 3.
Ограничитель уровня 25 выделит номер этого импульса (номер катушки), а триггер 26 запомнит этот номер. Одновременно все положительные импульсы катушек через разделительные диоды (на фиг.4 не показаны, т.к. могут входить в состав компаратора 29а) поступают на вход измерителя амплитуды 29, точнее на его компаратор. При этом полагаем, что используется положительная логика, т.е. напряжение питания микросхем плюсом. Измеритель амплитуды 29 выделит максимальный уровень амплитуды с принятой дискретностью, определяемой количеством m резисторов его делителя. Этот уровень будет зафиксирован соответствующим триггером 30. Шифратор 31 данного триггера противопоставляет его номеру (от 1 до m) цифровой десятичный код, который отражается на цифровом табло индикатора 32.
Как было отмечено выше, направление действия измеряемого импульса ускорения зафиксировано одним из входных триггеров 26. Потенциал прямого выхода сработавшего входного триггера обеспечит высвечивание этого номера светодиода 33 индикатора 32. Поскольку стилизованный круг с номерами катушек на крышке 15 датчика соответствует номерам светодиодов 33 индикатора 32, то оператор по этому кругу определяет направление измеряемого импульса ускорения.
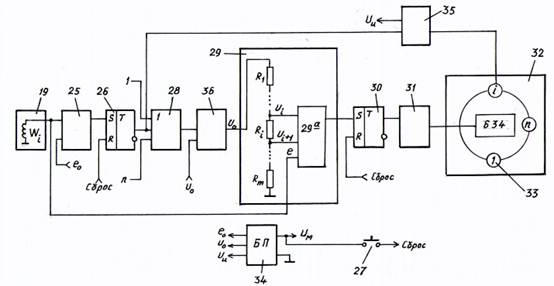
Рисунок 4. Функциональная схема электронного блока
Таким образом, предлагаемое устройство для измерения импульсных ускорений позволяет определить амплитуду и направление ускорения объекта исследований.
Список литературы:
1.Датчик ускорения. Патент RU2247992С2, МПК G01Р 15/02. Опубл. 10.03.2005.
2.Датчик абсолютных колебаний. Патент RU2063000, МПК G01Н 9/00. Опубл. 27.06.1996.
3.Преобразователь инерциальной информации. Патент RU2199755С1, МПК G01Р 15/13, 9/02. Опубл. 27.02.2003.
4.Устройство для измерения виброускорений. Патент RU2454645С1, МПК G01М 7/02; G01Р 15/093. Опубл. 27.06.2012.
дипломов