Статья опубликована в рамках: III Международной научно-практической конференции «Научное сообщество студентов: МЕЖДИСЦИПЛИНАРНЫЕ ИССЛЕДОВАНИЯ» (Россия, г. Новосибирск, 23 мая 2012 г.)
Наука: Технические науки
Секция: Нанотехнологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ЦИФРОВОЙ ИНДИКАТОР ПЕРЕМЕЩЕНИЯ НА ОСНОВЕ СЕНСОРА ADNS 3080
Буш Владимир Владимирович
студент 4 курса, кафедра радиофизики, физико-технического институт, ВолГУ, г. Волгоград
E-mail: Bush_Vladimir@mail.ru
Никитин Андрей Викторович
научный руководитель, канд. физ.-мат. наук, доцент, ВолГУ, г. Волгоград
Приоритетным направлением в области методов неразрушающего контроля является создание систем компьютерной диагностики. Развитие вычислительной техники делает эту задачу принципиально разрешимой при соответствующем повышении информативности измерений – существенном увеличении числа точек измерений и области пространства, в которой эти измерения производятся с необходимыми точностью и пространственным разрешением [1].
На кафедре Радиофизики разработана автоматизированная система оперативного магнитометрического контроля, реализующего принцип тензорной магнитной микротопологии.
В ходе выполнения НИР [2] был разработан макет сканирующего многоканального магнитного градиометра с высоким пространственным разрешением, позволяющего определять топологию пространственных производных поля рассеяния структурных неоднородностей при намагничивании геомагнитным полем.
Основной проблемой в достижении необходимых метрологических характеристик магнитометрических методов является необходимость одновременного измерения с высокой точностью магнитного поля в нескольких близко расположенных точках и обработки в режиме реального времени большого потока данных при сканировании по поверхности изделия с последующим решением обратной задачи. Влияние случайных погрешностей входных данных на погрешность решения можно в определенной мере устранить или, по крайней мере, уменьшить процедурой регуляризации, использующей априорную информацию об объекте измерения. Систематические же ошибки, как при измерении поля, так и при измерении координат, следует устранять аппаратными методами.
Созданный прибор (индикатор) является частью дефектометра. Его основой является сенсор оптической мыши ADNS 3080, работающий под управлением контроллера по специально написанной программе для точного определения координаты металлического троса в процессе его дефектоскопии с помощью дефектометра.
Основой индикатора является сенсор ADNS 3080 фирмы Avago [3], размер ПЗС-матрицы которого составляет 30×30 точек, разрешение около 60 точек/мм, а максимальная частота снимков поверхности равна 6400 кадров в секунду. Сенсор имеет встроенный DSP-процессор, который вычисляет смещение сенсора вдоль осей Х и Y относительно предыдущего положения.
В разработанном устройстве контроля перемещения применена типовая для сенсора ADNS3080 оптическая схема, которая представлена на рис. 1, а ее основные элементы в порядке их сборки приведены на рис. 2 [3].
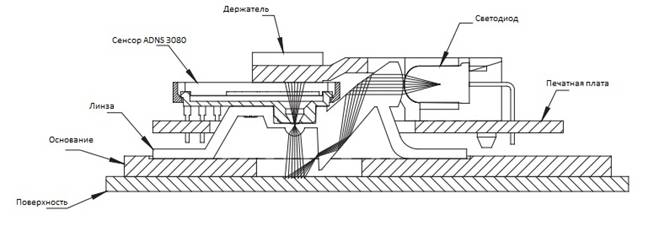
Рис. 1 – Типовая оптическая схема сенсора ADNS 3080
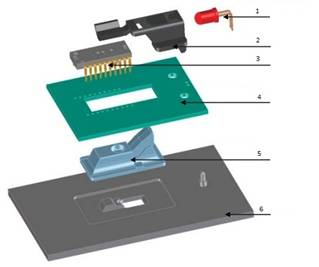
Рис. 2 ‑ Основные элементы типовой оптической схемы сенсора ADNS3080: 1 ‑ светодиод HLMP-EG3E, 2 ‑ держатель ADNS-2220-001, 3 ‑ сенсор ADNS 3080, 4 ‑ печатная плата, 5 ‑ линза, 6 – монтажная пластина
С помощью светодиода (1), и системы фокусирующих его свет линз (5) под сенсором (3) подсвечивается участок поверхности. Отраженный от поверхности свет собирается линзой (5) и попадает в ПЗС матрицу сенсора (3). Вся система размещается на монтажной пластине (6).
Для удобства применения принципиальная схема устройства контроля перемещения состоит из двух блоков – базового и вспомогательного. Базовый блок включает минимальный набор компонент, необходимый для получения снимков с исследуемой поверхности или смещения сенсора относительно положения в момент предыдущего опроса. Вспомогательный блок обрабатывает данные и представляет результат в виде координат сенсора относительно точки, в которой устройство было включено.
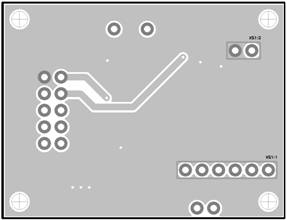
Принципиальная схема базового блока устройства приведена на рис. 3. Основным элементом схемы является сенсор DD1 ADNS3080, а номиналы элементов ZQ1, C1, R1, VT1, HL1 выбраны согласно [3]. Разъем XP1 используется для соединения с вспомогательным блоком. Чертеж печатной платы базового блока устройства приведен на рис. 4.
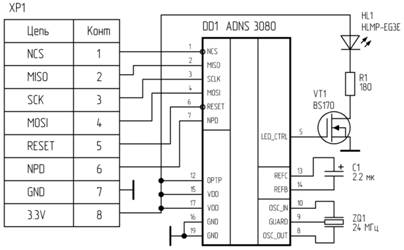
Рис. 3 ‑ Принципиальная схема базового блока устройства контроля перемещения
Вид со стороны деталей Вид со стороны монтажа
Рис. 4 – Чертеж печатной платы базового блока
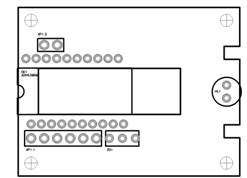
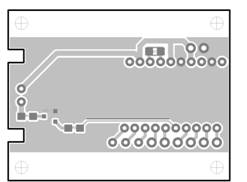
Принципиальная схема вспомогательного блока устройства приведена на рис. 5. Основным элементом схемы является микроконтроллер DD1 ATmega16 фирмы ATMEL. Разъем XS1 используется для соединения с основным блоком, разъем XP1 используется для обмена данными с внешними устройствами и для программирования контроллера DD1. Питание устройства осуществляется от батареи напряжением 5 В через стабилизатор U1. Чертеж печатной платы вспомогательного блока приведен на рис. 6 [1].
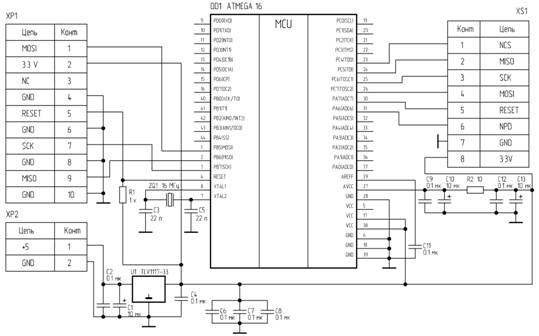
Рис. 5 – Принципиальная схема вспомогательного блока устройства контроля перемещения
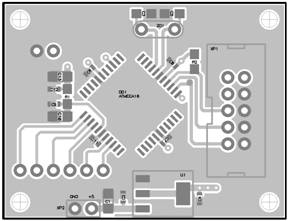
Вид со стороны деталей Вид со стороны монтажа
Рис. 6 – Чертеж печатной платы вспомогательного блока
Монтажная пластина устройства контроля перемещения изготовлена из дюралюминия марки Д16Т по чертежу, приведенному на рис. 7. Плата основного блока крепится к монтажной пластине винтами М2, изготовленными из твердых сортов немагнитной латуни. Сверху устанавливается плата вспомогательного блока. С окна для линзы снята фаска для снижения рассеяния света на резких гранях. Отверстия диаметром 3,5 мм используются для крепления устройства к датчику дефектометра.
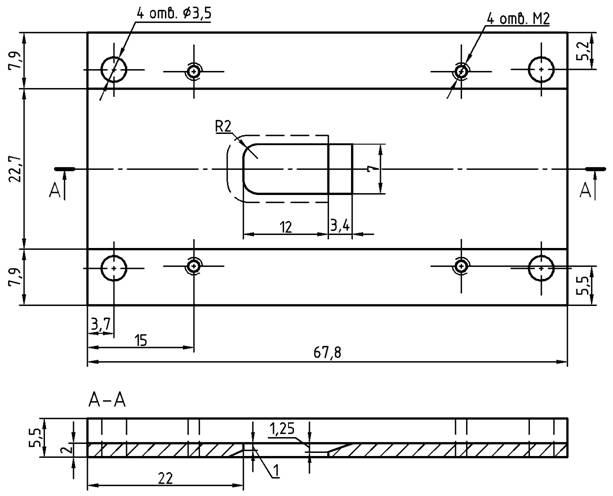
Рис. 7 – Чертеж монтажной пластины
Калибровка устройства контроля перемещения дефектометра заключается в определении чувствительности оптического сенсора и его крутизны. Для этого требуется позиционирование сенсора с точностью не менее 0,01 мм. Этим требованиям удовлетворяет фрезеровально-гравировальный станок Everprecision EP2006H.
Устройство контроля перемещения закреплялось в каретке с помощью алюминиевого уголка. Крутизна сенсора, оценка которой производилась при перемещении каретки станка вдоль оси Y на 180 мм, составляла 0,03 мм/пиксель. Погрешность измерения координаты определялась повторением этого эксперимента 5 раз и составила не более 30 мкм [1].
На реальных распределениях полей были проведены измерения распределения магнитного поля рассеяния на стальных многожильных канатах диаметром 3,2 мм. Исходная информация, поступающая с контроллера цифрового блока дефектометра, представляет собой отсчеты напряжений на трех датчиках Холла и координаты положения дефектоскопируемого образца. На рис. 8 показаны отсчеты напряжений на преобразователях Холла, поступающие из цифровой части дефектометра в зависимости от измеренной индикатором координаты.

Рис. 8 – Зависимости напряжений на преобразователях Холла от координаты (цифрами указаны номера преобразователей)
Список литературы:
1. Разработка автоматизированного комплекса магнитометрической дефектоскопии на основе метода тензорной магнитной микротопологии. Отчет по 4 этапу НИР/ГОУ ВолГУ; рук. В. К. Игнатьев; исполн. А. В. Никитин и др. – Волгоград, 2012. – 355 с. – Г.К. № 14.740.11.0830 от 01.12.2010 г, № госрегистрации 01201150201.
2. Разработка автоматизированного комплекса магнитометрической дефектоскопии на основе метода тензорной магнитной микротопологии. Отчет по 3 этапу НИР/ ГОУ ВПО ВолГУ; рук. В. К. Игнатьев; исполн. А. В. Никитин и др. – Волгоград, 2011. – 388 с. – Г.К. № 14.740.11.0830 от 01.12.2010 г, № госрегистрации 01201150201.
3. Техническое описание микросхемы ADNS 3080 [Электронный ресурс]: http://www.avagotech.com/docs/AV02-0366EN (дата обращения : 15.02.2012)
4. Разработка автоматизированного комплекса магнитометрической дефектоскопии на основе метода тензорной магнитной микротопологии. Отчет по 2 этапу НИР/ ГОУ ВПО ВолГУ; рук. В. К. Игнатьев; исполн. А. В. Никитин и др. – Волгоград, 2011. – 196 с. – Г.К. № 14.740.11.0830 от 01.12.2010 г, № госрегистрации 01201150201.
дипломов