Статья опубликована в рамках: XXXIX Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 22 октября 2014 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ПРОБЛЕМЫ ПРОЕКТИРОВАНИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ ОТКЛОНЕНИЯ ЛАЗЕРНОГО ЛУЧА
Кононов Сергей Николаевич
старший преподаватель Южно-Уральский государственный университет, РФ, г. Челябинск,
E-mail:
MECHANICAL DESIGN PROBLEMS OF LASER BEAM DEFLECTION
Kononov Sergey
lecturer South Ural State University, Russia, Chelyabinsk
АННОТАЦИЯ
В статье рассматриваются вопросы, которые могут возникнуть при проектировании системы зеркал для отклонения лазерного луча, рассматриваются возможные пути решения возникающих задач.
ABSTRACT
The problems that may arise in the design of a system of mirrors to deflect the laser beam, are considered possible solutions to the problems.
Ключевые слова : механическая система отклонения; управление углом поворота; закон управления отклонением.
Keywords : mechanical system of deflection; control of the angle of rotation; control law of deflection.
За прошедшие уже более полувека после его создания, лазер и использующие его установки превратились из единичных экземпляров, исследуемых в ведущих лабораториях в серийно изготавливаемые устройства, применяемые в различных областях жизни. Медики используют свойства лазерного луча при проведении операций и для послеоперационной реабилитации. Во всех супермаркетах лазерный луч используется для считывания штрих-кода продукта. В строительстве лазер — незаменимый помощник, вытеснивший повсеместно отвесы, заменяющий или дополняющий оптические геодезические приборы. Это далеко не полный список возможного применения лазера. Во многих случаях лазерный луч используется исключительно совместно с оптической системой, осуществляющей отклонение луча для достижения поставленной перед устройством цели. Пожалуй даже можно говорить о том, что, кроме использования в лазерных прицелах и лазерных указках, лазер обязательно используется совместно с оптической отклоняющей системой.
Управление отклонением лазерного луча условно можно поделить на три различных способа. В лазерных принтерах, устройствах считывания штрих-кодов и инструментах чаще всего находят применения схемы с использованием вращающихся призм и зеркал, осуществляющие с помощью луча развёртку по заранее известной прямой. Такие схемы отличаются очень большим углом развёртки, высоким быстродействием, но абсолютно не подходят для создания произвольных траекторий перемещения лазерного луча.
Также отклонения лазерного луча можно осуществлять, используя рефракцию или дифракцию прозрачных для луча сред. Этот способ не позволит добиться больших углов развёртки, хотя предполагает высокое быстродействие.
Ещё один вариант оптической схемы предполагает наличие двух зеркал, угол отклонения каждого из которых задаётся приводом. Такое решение может быть использовано при отрисовке несложных изображений на близко расположенных объектах: передача информации для пилота на стекле самолёта, строительная разметка, реклама на витрине и стене магазина и другие варианты.
Последняя представленная схема интересна тем, что позволяет достигать больших углов развёртки, при этом традиционно имеет низкое быстродействие. В случае использовании этого варианта перед разработчиком возникнет ряд задач. В работе представлены вопросы проектирования описанных систем, которые можно сформулировать и хотя бы частично разрешить общим порядком. Поставив задачу визуализировать отрезками изображение на плоскости при заранее известной его точности, количестве кадров в секунду и расположения источника лазерного излучения относительно плоскости рисования, акцентируем внимание на четырёх вопросах. Считая аналоговые системы морально устаревшими, как выбрать разрядность для дискретизации угла отклонения зеркала, смоделировать закон управления, обеспечивающий заданное качество изображения, посчитать требуемую вычислительную мощность управляющей отклонением системы и рассмотреть возможности увеличения её быстродействия.
Поскольку в оптической системе используется идентичная пара зеркал для отклонения по горизонтали и вертикали, то рассматривается только один независимый канал управления зеркалом
Вопрос дискретизации угла отклонения решается пересчётом шага дискретизации по координате рисунка в угол отклонения. Дальнейшие исследования могут только уменьшить шаг дискретизации при необходимости.
В любительских решениях для управления отклонением зеркала используются быстродействующие гальванометры [3]. Возвращающая пружина гальванометра несколько уменьшает быстродействие системы, поэтому от неё необходимо избавиться несмотря на неизбежные в этом случае сложности в генерировании управляющего сигнала. Полученное устройство для поворота зеркала можно описать следующей передаточной функцией [1]:
![]() (1)
(1)
где: kv — коэффициент усиления разомкнутой системы по скорости;
kр — статический коэффициент передачи регулятора;
kс — коэффициент передачи сканатора;
Tм — электромеханическая постоянная времени сканатора;
Tэ — электромагнитная постоянная времени сканатора.
Электромеханическая постоянная времени приблизительно на порядок больше электромагнитной и для взятого в качестве примера сканатора фирмы «АТЕКО-ТМ» [2] с оптимальной нагрузкой на валу равна 6 мс против 0,25 мс для электромагнитной постоянной. Для примерного расчёта kv можно задать до ста отрезков на отображаемом рисунке, 15 кадров в секунду и точность воспроизведения в 5 %. Значение kv тогда получается выше 1000 с-1. Из формулы (1) видно, что система получается третьего порядка, с астатизмом первого порядка. Приблизительная логарифмическая амплитудно-частоная характеристика разомкнутой системы показана на рисунке 1.
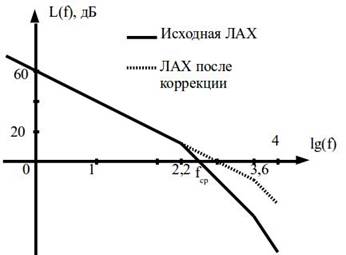
Рисунок 1. ЛАХ разомкнутой системы
Оценочный расчёт показывает, что при замыкании мы получим устойчивую систему. Однако, наклон ЛАХ на частоте среза будет -40 дБ/дек, что гарантирует колебательный переходной процесс. В системе отклонения лазерного луча колебательный процесс недопустим, поскольку ведёт к размытию краёв отрезков рисунка. Процесс должен быть апериодическим. Широко известная в интернете схема Чена [3] для лазерного проектора тоже содержит раздел, посвящённый реализации обратной связи, обеспечивающей оптимальный переходной процесс. Очевидно, что обратную связь надо будет делать гибкой. Обратная связь по скорости поднимет наклон на частоте среза до -20 дБ/дек, что приведёт к уменьшению колебательности переходного процесса вплоть до превращения его в апериодический. Влияние электромагнитной постоянной времени сканатора при увеличении требований к изображению может привести к необходимости вводить обратную связь и по ускорению угла поворота зеркала. Итак, оценочный анализ исходных данных позволяет утверждать, что необходима реализация пропорционально- дифференцирующего закона управления.
По скорретированной ЛАХ системы можно оценить минимальную частоту дискретизации для получаемого цифрового сигнала угла поворота зеркала. В рассматриваемом примере частота дискретизации может быть взята выше 5 кГц. В этом случае изменение ЛАХ системы под влиянием дискретизации будет на частоте выше частоты среза, что позволит не рассматривать этот эффект.
Ранее предлагалось решение вопроса о дискретизации угла поворота зеркала. Однако теперь необходимо уточнить это значение, поскольку кроме обратной связи по углу положения необходима и обратная связь по скорости изменения этого угла. Искомая скорость может быть получена как величина, пропорциональная разности текущего и предыдущего отсчётов угла. При невысокой разрядности значения выходной величины скорость её представляется функцией с ярко выраженной ступенчатостью, объясняемой большим значением шага дискретизации по уровню. Увеличение разрядной сетки для угла отклонения может привести к неоправданному росту требований к вычислительной мощности управляющей системы, однако здесь видится простой вариант разрешения проблемы. Разрядность при оцифровке угла поворота выбирается исходя из частоты дискретизации и требований к точности по скорости системы. Для формирования пропорциональной части сигнала регулятора необходимо брать старшие биты значения сигнала обратной связи в количестве, определяемом требованиями к максимальной ошибке отрисовки, обуславливаемой дискретностью системы. Младшие же биты будут необходимы для обратной связи по скорости. Их количество определяется частотой дискретизации, максимальной скоростью в системе и заданной ошибкой дискретизации по скорости.
Вышеописанное позволяет для выбранного оборудования, при заданной сложности картинки и требованиях по её точности сделать приблизительный расчёт необходимой вычислительной мощности регулятора.
Необходимо отметить, что вопросы, возникающие перед разработчиком подобного оборудования, достаточно объёмны. Данное статья затрагивает только часть из них, может служить помощью на начальном этапе работы. Некоторые из приведённых положений можно обобщать и углублять с целью формализации подхода к проектированию.
Список литературы:
1.Бесекерский В.А., Попов Е.П. Теория систем автоматического управления / В.А. Бесекерский, Е.П. Попов. Изд. 4-е, перераб. и доп. СПб, Изд-во «Профессия», 2004. — 752 с.
2.Нестерук И.Н. Современные гальванометрические сканаторы. Лазер-информ, — № 5 (356) — март 2007, — с. 9—10.
3.Home built laser projector / The Electronic Lives Manufacturing — presented by ChaN [Электронный ресурс]. —Режим доступа. — URL: http://elm-chan.org/works/vlp/report_e.html (дата обращения 15.10.2014).
дипломов