Статья опубликована в рамках: XXXIV Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 28 мая 2014 г.)
Наука: Технические науки
Секция: Аэрокосмическая техника и технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ОПТИМАЛЬНАЯ ПРОГРАММА УПРАВЛЕНИЯ В ЗАДАЧЕ ФОРМИРОВАНИЯ ВЫСОТЫ ПЕРИГЕЯ С ИСПОЛЬЗОВАНИЕМ МАЛОЙ ТЯГИ
Ишков Сергей Алексеевич
д-р техн. наук, профессор Самарского государственного аэрокосмического университета (национального исследовательского университета), РФ, г. Самара
E -mail: ishkov@ssau.ru
Филиппов Григорий Александрович
специалист, инженер Самарского государственного аэрокосмического университета (национального исследовательского университета), РФ, г. Самара
OPTIMAL CONTROL IN PROBLEM OF FORMING OF HEIGHT OF PERIGEE WITH LOW – TRUST
Ishkov Sergey
doctor of technical science, Associate professor of Samara State Aerospace University (National Research University), Russia, Samara
Filippov Grigoriy
specialist, Engineer of Samara State Aerospace University (National Research University), Russia, Samara
АННОТАЦИЯ
Рассматривается задача управления высотой перигея высокоэллиптической орбиты. Получена локально-оптимальная программа управления ориентацией вектора тяги на витке. С использованием принципа максимума Л.С. Понтрягина сформулирована и решена краевая задача оптимального управления перигеем орбиты. Приведён сравнительный анализ программ управления для задачи утилизации космического мусора.
ABSTRACT
The problem of control of perigee of high elliptical orbit is studied. The locally-optimum program of control of orientation of the trust vector of the propulsion system is obtained. Using Pontryagin maximum principle, the boundary value problem of optimal control of perigee is formulated and solved. The comparative analysis of the resultsis shown.
Ключевые слова: высота перигея; оскулирующие элементы; локально-оптимальная программа управления ориентацией вектора тяги; принцип максимума Понтрягина; краевая задача.
Keywords: the height of perigee; osculating elements; locally-optimum trust vector control program; Pontryagin maximum principle; boundary value problem.
Радиус перигея орбиты, как известно, определяет минимальное расстояние от космического аппарата до поверхности Земли и является важной характеристикой, определяемой срок существования космического аппарата на орбите.
В данной работе рассматривается задача оптимального и локально-оптимального управления радиусом перигея орбиты с использованием на борту космического аппарата двигателя малой тяги.
Данная задача является актуальной при реализации операции увода и спуска с орбиты космического мусора. Применение для этих целей специального многоразового космического аппарата — сборщика мусора, снабжённого электрореактивными двигателями малой тяги позволяет повысить эффективность процедуры утилизации космического мусора [1].
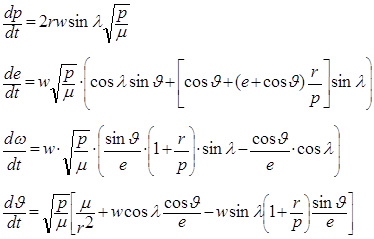
Введём в рассмотрение систему дифференциальных уравнений в оскулирующих элементах, описывающих движение космического аппарата в плоскости орбиты [2]:
 (1)
(1)
где: р — фокальный параметр орбиты,
e — эксцентриситет орбиты,
![]() — аргумент перигея,
— аргумент перигея,
r — геоцентрическое расстояние ![]() ,
,
![]() — истинная аномалия,
— истинная аномалия,
![]() — гравитационный параметр Земли,
— гравитационный параметр Земли,
![]() — угол между вектором тяги реактивной струи и радиус вектором в плоскости орботы,
— угол между вектором тяги реактивной струи и радиус вектором в плоскости орботы,
w — ускорения тяги.
Так как двигатель работает без выключений и является нерегулируемым, то единственным параметром управления будет угол ![]() .
.
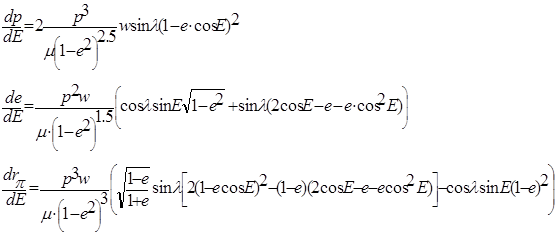
В качестве допущения примем, что реактивное ускорение мало по сравнению с гравитационным и ![]() . На этом основании осуществим переход к новой независимой переменной – эксцентрической аномалии E, пренебрегая членами содержащими множитель
. На этом основании осуществим переход к новой независимой переменной – эксцентрической аномалии E, пренебрегая членами содержащими множитель ![]() . Получим систему уравнений вида:
. Получим систему уравнений вида:
 (2)
(2)
Поскольку положение перигея, определяемое ![]() , не рассматривается, то уравнение для него опущено.
, не рассматривается, то уравнение для него опущено.
Определим локально оптимальное управление углом ориентации вектора тяги ![]() , обеспечивающим наибольшую скорость изменения радиуса перигея
, обеспечивающим наибольшую скорость изменения радиуса перигея ![]() . Для этого найдём решение уравнения
. Для этого найдём решение уравнения ![]() относительно управления
относительно управления ![]() [3].
[3].
 (3)
(3)
Рассмотрим вопрос о предельных возможностях управления. Для тех же допущений определим оптимальную программу управления углом ориентации тяги ![]() с использованием принципа максимума Л.С. Понтрягина [4].
с использованием принципа максимума Л.С. Понтрягина [4].
В соответствии с общим алгоритмом принципа максимума запишем гамильтониан системы для критерия ![]()
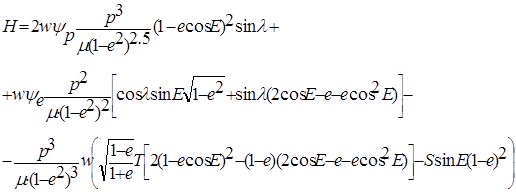 (4)
(4)
где![]() и
и ![]() — спряжённые множители для фокального параметра и эксцентриситета соответственно.
— спряжённые множители для фокального параметра и эксцентриситета соответственно.
Оптимальное управление ![]() определится из условия максимума Н.
определится из условия максимума Н.
 (5)
(5)
Уравнения для сопряженных множителей примут вид:
 (6)
(6)
Из условий трансверсальности в конечной точке ![]() , значения сопряженных множителей
, значения сопряженных множителей ![]() должны быть равны нулю. Тогда граничные условия решаемой системы (2), (6) с учётом управления (5) примут вид:
должны быть равны нулю. Тогда граничные условия решаемой системы (2), (6) с учётом управления (5) примут вид:
 (7)
(7)
Краевая задача сводится к определению начальных значений сопряжённых множителей ![]() для удовлетворения граничных условий (7). Для определения начального приближения могут быть использованы решения, полученные при интегрировании локально-оптимальной программой (3). Краевая задача обладает хорошей сходимостью при интегрировании из конечной точки в начальную с отрицательным шагом.
для удовлетворения граничных условий (7). Для определения начального приближения могут быть использованы решения, полученные при интегрировании локально-оптимальной программой (3). Краевая задача обладает хорошей сходимостью при интегрировании из конечной точки в начальную с отрицательным шагом.
На рисунке 1 показана полученная локально-оптимальная и оптимальная программа управления ориентацией вектора тяги на одном витке.
Рисунок 1 Оптимальная и локально-оптимальная программы управления ориентацией вектора тяги на витке
Программы близки друг к другу на всём диапазоне значений углов эксцентрической аномалии ![]() , за исключением точек в окрестности точки
, за исключением точек в окрестности точки ![]()
Проведённые расчёты показали, что выигрыш при использовании оптимальной программы (5) по сравнению с локально-оптимальной программой (3) составляет величину менее 1 % на одновитковом интервале, на многовитковом интервале 5-7 % в зависимости от граничных условий перелета.
Рассмотрим задачу формирования предспусковой эллиптической орбиты с высотой перигея 200 км, используемой для реализации управляемого спуска с орбиты космического мусора с использованием малой тяги.
Варьировалась высота перигея ![]() и высота апогея
и высота апогея ![]() начальной орбиты и рассчитывались затраты характеристической скорости
начальной орбиты и рассчитывались затраты характеристической скорости ![]() обеспечивающие перелёт по программе (3) с начальной орбиты на предспусковую.
обеспечивающие перелёт по программе (3) с начальной орбиты на предспусковую.
 (8)
(8)
Результаты некоторых расчётов представлены на рисунке 2 в виде линий уровня равных затрат ![]() . Расчёт выполнен для ускорения тяги
. Расчёт выполнен для ускорения тяги ![]()
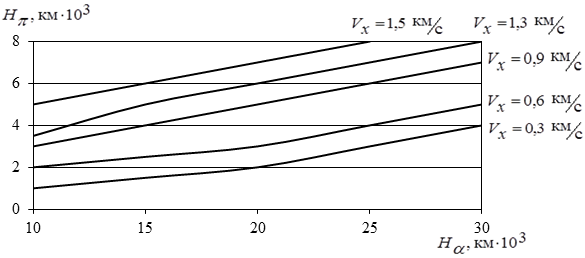
Рисунок 2. Затраты характеристической скорости для перевода КА с произвольной орбиты на предспусковую
В рассматриваемом диапазоне параметров линии уровня оказались близкими к линейным функциям.
Полученные в статье результаты позволяют дать оценку эффективности применения оптимальной и локально-оптимальной программ управления высотой перигея для задачи коррекции и вывода на предспусковую орбиту фрагментов космического мусора.
Список литературы:
1.Ишков С.А., Филиппов Г.А. Выбор проектных параметров космического аппарата сборщика — мусора с использованием малой тяги // Вестник СГАУ — 2014. — № 3. — С. 25—35.
2.Лебедев В.Н. Расчет движения космического аппарата с малой тягой. М.: ВЦ АН СССР, 1968. — 108 с.
3.Охоцимский Д.Е., Сихарулидзе Ю.Г. Основы механики космического полёта. М.: Наука. 1990. — 448 с.
4.Понтрягин Л.С., Болтянский В.Г. и др. Математическая теория оптимальных процессов / под ред. Понтрягина Л.С./ М.: Наука, 1976, — 392 с.
дипломов