Статья опубликована в рамках: XXVI Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 02 октября 2013 г.)
Наука: Технические науки
Секция: Машиностроение и машиноведение
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ УПРАВЛЯЕМЫХ ДЕБАЛАНСНЫХ ВИБРОВОЗБУДИТЕЛЕЙ
Черевко Александр Николаевич
канд. техн. наук, зав. кафедрой теоретической механики,
доцент Полтавского национального технического университета, г. Полтава
E-mail:
DYNAMIC CHARACTERISTICS OF CONTROLLED DEBALANCE VIBRATION EXCITERS
Alexandr Cherevko
candidate of Science, Head of Theoretical Mechanics department, assistant professor of Poltava National Technical University, Poltava
АННОТАЦИЯ
Управляемые дебалансные вибровозбудители — основа технологических машин будущего. Генератор колебаний позволяет получать разнообразные нестационарные вибрационные поля переменной структуры. Для оценки возможностей управляемого вибровозбудителя используется теория приведения системы сил к заданному центру. В результате проведенных исследований были построены графики зависимостей динамических характеристик силового поля от угла поворота подвижного дебаланса.
ABSTRACT
Controlled unbalance vibration exciters - the basis of machinery technology of the future. The oscillator produces a variety of non-stationary vibrational fields of variable structure. To assess the opportunities managed exciter theory is used to bring the system of forces to a given center. The studies were plotted dynamic characteristics of power-th field of the angle of rotation of the movable eccentric weight.
Ключевые слова: дебаланс; вибровозбудитель, силовое поле.
Keywords: eccentric weight, vibration exciter, the force field.
В качестве привода вибрационной машины может использоваться управляемый вибровозбудитель с тремя дебалансами [1—2]. В начальный момент времени, который совпадает с моментом пуска машины, он представляет собой динамически уравновешенную систему. Дальнейшая работа машины связана с перемещением подвижных дебалансов вдоль дебалансного вала по направлению винтовых канавок.
Рассмотрим несколько возможных случаев:
1. направление поворота подвижных дебалансов совпадают (против часовой стрелки, если смотреть навстречу оси ![]() ) (рис. 1а);
) (рис. 1а);
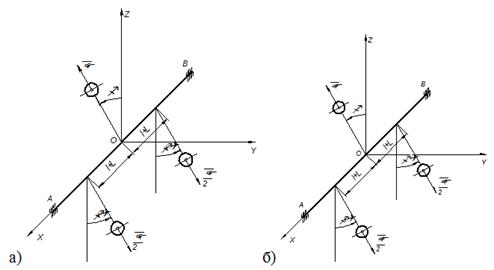
Рисунок 1. Схема управляемого трехдебалансного вибровозбудителя: а) направление поворота подвижных дебалансов совпадают; б) направление поворота подвижных дебалансов противоположны
Для определения возможностей вибровозбудителя приведем систему сил инерции к простейшему виду.
Определим главный вектор сил инерции ![]() :
:
![]() .
.
Проекции главного вектора на оси координат определяются по следующим формулам:
![]() ;
; ![]()
![]()
![]()
![]() ;
; 
 (рис. 2).
(рис. 2).
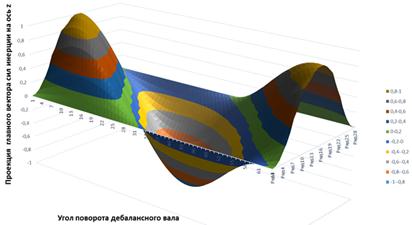
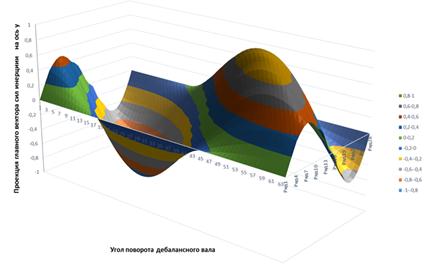
Рисунок 2. Изменение проекций главного вектора сил инерции на оси координат
![]() .
. ![]() ; (рис. 3а).
; (рис. 3а).
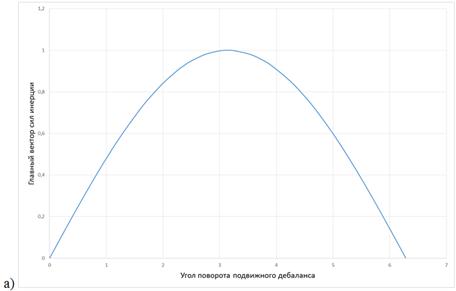
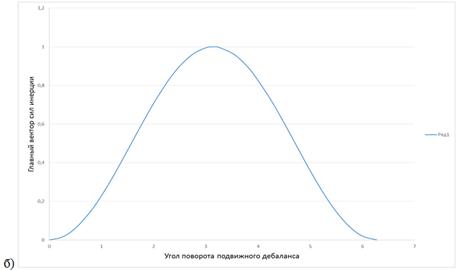
Рисунок 3. Изменение главного вектора сил инерции: а) направление поворота подвижных дебалансов совпадают; б) направление поворота подвижных дебалансов противоположны
Определим главный момент сил инерции ![]() .
.
![]() ;
;
где: ![]() ;
; ![]() ;
; ![]() .
.
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Таким образом, система сил приводится к равнодействующей в центре приведения ![]() ,
, ![]() .
.
Определим направляющие косинуси равнодействующей:
 ;
; 
 .
.
2. направление поворота подвижных дебалансов противоположны (рис. 1б);
Приведем систему сил к центру ![]() .
.
Главный вектор системы сил ![]() имеет следующие проекции на оси координат:
имеет следующие проекции на оси координат:
![]() ;
; ![]() ;
; ![]()
![]() ;
; ![]()
![]() (рис.4).
(рис.4).
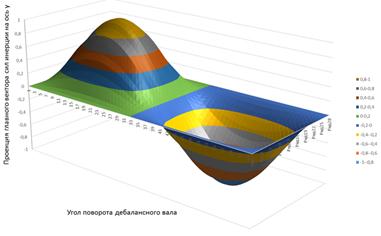
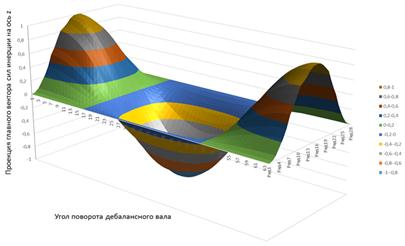
Рисунок 4. Изменение проекций главного вектора сил инерции на оси координат
 (рис.3б).
(рис.3б).
Проекции главного момента ![]() на оси координат определяться по следующим формулам:
на оси координат определяться по следующим формулам:
![]() ;
; ![]()
![]()
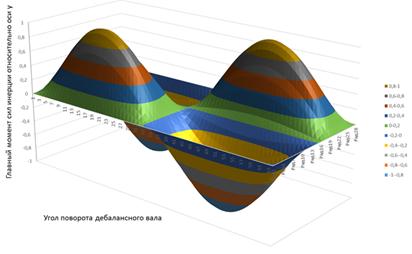
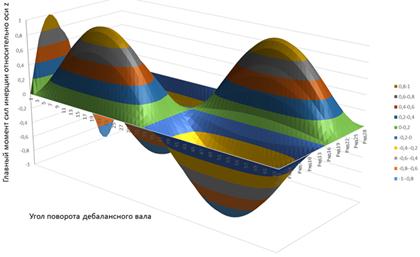
Рисунок 5. Изменение проекций главного момента сил инерции на оси координат
Определим главный момент ![]() системы сил:
системы сил:
![]() .
.
Для оценки возможностей вибровозбудителя по синтезу вибрационных полей, определим наименьший главный момент системы сил:

Таким образом, система сил может приводиться к динамическому винту с параметром:
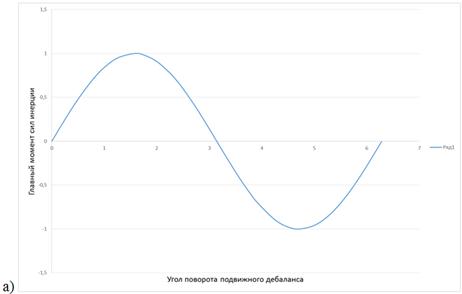
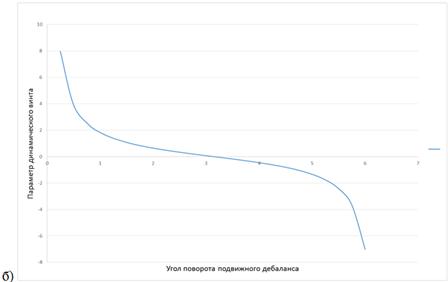
Рисунок 6. Изменение динамических параметров вибровозбудителя: а)главного момента сил инерции; б) параметра динамического винта
Определим уравнение центральной винтовой оси:
 .
. ![]() .
.
Исследуем, когда полученное уравнение выполняется:
1) ![]() ;
; ![]() ;
; ![]() ;
;
В этом случае ![]() ;
; ![]() ; и система находится в динамическом равновесии.
; и система находится в динамическом равновесии.
2) ![]() ;
; ![]() .
.
 ;
; ![]() .
.
 ;
; ![]() .
.
Таким образом, получены следующие уравнения оси:
Решим эту систему:
а) ![]() ;
;
б) ![]() ;
; ![]() ;
; ![]() ,
, ![]() — система находится в динамическом равновесии, поэтому этот корень не подходит;
— система находится в динамическом равновесии, поэтому этот корень не подходит;
в) если ![]() , то необходимо, чтобы и
, то необходимо, чтобы и ![]() , а это невозможно;
, а это невозможно;
г) если ![]() , то дополнительно должно быть и
, то дополнительно должно быть и ![]() , а это, как показано выше, в данной задаче невозможно.
, а это, как показано выше, в данной задаче невозможно.
Принимаем ![]() .
.
Система сил инерции не приводится к динамическому винту, когда ![]() . Таким образом, должно быть:
. Таким образом, должно быть: ![]() . Уравнение выполняется тогда, когда:
. Уравнение выполняется тогда, когда: ![]() , а
, а ![]() .
.
При ![]() система сил находится в динамическом равновесии, а при
система сил находится в динамическом равновесии, а при ![]() ,
, ![]() ,
, ![]() и система сил приводится к равнодействующей, приложенной в старом центре приведения. Проекции равнодействующей на оси координат имеют вид:
и система сил приводится к равнодействующей, приложенной в старом центре приведения. Проекции равнодействующей на оси координат имеют вид:
![]() ;
; ![]() ;
;
![]() .
.
Случай приведения системы сил к паре сил невозможен, так как:
![]() , при
, при ![]() , но в этом случае
, но в этом случае ![]() .
.
Выводы.
При изменении угла поворота ![]() подвижных дебалансов в пределах от
подвижных дебалансов в пределах от ![]() до
до ![]() система сил инерции приводится к различным простым видам:
система сил инерции приводится к различным простым видам:
1. ![]() , система сил находится в динамическом равновесии;
, система сил находится в динамическом равновесии;
2. ![]() , система сил приводится к правому динамическому винту с параметром
, система сил приводится к правому динамическому винту с параметром ![]() ;
;
3. ![]() , система сил приводится к равнодействующей,
, система сил приводится к равнодействующей, ![]() приложенной в старом центре приведения;
приложенной в старом центре приведения;
4. ![]() , система сил приводится к левому динамическому винту с параметром
, система сил приводится к левому динамическому винту с параметром ![]() . Может показаться на первый взгляд, что изменение угла поворота подвижных дебалансов в этих пределах, ничем не отличается от пункта б. Однако, это не так. Происходит изменение направления динамического винта в процессе работы технологической машины;
. Может показаться на первый взгляд, что изменение угла поворота подвижных дебалансов в этих пределах, ничем не отличается от пункта б. Однако, это не так. Происходит изменение направления динамического винта в процессе работы технологической машины;
5. ![]() , система сил находится в динамическом равновесии.
, система сил находится в динамическом равновесии.
Список литературы:
1.Бабичев А.П. Основы вибрационной технологии / А.П. Бабичев, И.А. Бабичев. Ростов-н/Д.: ДГТУ, 1999. — 620 с.
2.Сердюк Л.И. Основы теории, расчет и конструирование управляемых вибрационных машин с дебалансными возбудителями: автореф. дис. докт. техн. наук / Л.И. Сердюк; ХПИ. Харьков, 1991. — 48 с.
дипломов