Статья опубликована в рамках: XXV Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 04 сентября 2013 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ОБ ОЦЕНКЕ ЭНЕРГОЭФФЕКТИВНОСТИ ПРИМЕНЕНИЯ НЕЙРОСЕТЕВОЙ НАДСТРОЙКИ НАД ПИД-РЕГУЛЯТОРОМ ДЛЯ УПРАВЛЕНИЯ НЕЛИНЕЙНЫМИ ОБЪЕКТАМИ
Еременко Юрий Иванович
д-р техе. наук, профессор, Старооскольский технологический институт (филиал) НИТУ «МИСиС», г. Старый Оскол
E-mail: erem49@mail.ru
Полещенко Дмитрий Александрович
канд. техн. наук, доцент, Старооскольский технологический институт (филиал) НИТУ «МИСиС», г. Старый Оскол
E-mail: po-dima@yandex.ru
Глущенко Антон Игоревич
канд. техн. наук, доцент, Старооскольский технологический институт (филиал) НИТУ «МИСиС», г. Старый Оскол
E-mail:
ABOUT THE ENERGY EFFICIENCY ESTIMATION OF PID-REGULATOR NEURAL NETWORK TUNER USAGE FOR NONLINEAR PLANTS CONTROL
Yuri Eremenko
doctor of technical sciences, Professor of Stary Oskol technological institute (branch) NUST "MISiS", Stary Oskol
Dmitry Poleshchenko
candidate of technical sciences, Associate professor of Stary Oskol technological institute (branch) NUST "MISiS", Stary Oskol
Anton Glushchenko
candidate of technical sciences, Associate professor of Stary Oskol technological institute (branch) NUST "MISiS", Stary Oskol
АННОТАЦИЯ
В статье описана реализация схемы управления с автонастройкой ПИД-регулятора на основе нейронной сети. Для оперативного обучения сети применен метод обратного распространения ошибки, дополненный базой правил, включающей условия на изменение скорости обучения. Полученная надстройка и обычный ПИД-регулятор применены для управления электронагревательной печью, работающей в различных режимах загрузки. Для экспериментов оценен расход электроэнергии и сделан вывод о том, что ПИД-регулятор с нейронадстройкой позволил сэкономить 5% электроэнергии на ведение технологического процесса.
ABSTRACT
The neural network with self-adjustment control scheme is implemented. The backpropagation online training method was used. It was modified by adding a rule base. It contains conditions for choosing learning rate. PID-regulator with neural tuner and conventional PID-regulator were used for electric heating furnace control, working in different loading modes. Electric power consumption estimation was done for both experiments and the conclusion was made than the system with neural tuner made it possible to reduce the power consumption by 5% in comparison with the conventional PID-regulator.
Ключевые слова: нейронная сеть, ПИД-регулятор, нейросетевой оптимизатор, метод обратного распространения ошибки, нелинейные системы.
Keywords: neural network, PID-regulator, neural tuner, backpropagation algorithm, nonlinear systems.
На сегодняшний день достаточно активно ведутся исследовательские работы в области совершенствования систем управления технологическими процессами. Эта проблема весьма актуальна, поскольку, большинство реальных объектов управления обладают нелинейными характеристиками, которые изменяются в процессе эксплуатации, в то время как управление ими ведется, в большинстве случаев, с помощью линейных ПИД-регуляторов. Коэффициенты таких регуляторов часто подобраны оптимально для конкретного состояния объекта, однако при его переходе в другие состояния (например, смена задания по температуре, загрузка печи) данные значения коэффициентов уже не позволяют получать требуемых по качеству переходных процессов. Это ведет к снижению качества регулирования и к росту энергозатрат на ведение технологических процессов. Особенно данная проблема актуальна для металлургической отрасли ввиду наличия там большого числа нагревательных объектов — печи нагрева литой заготовки, дуговые печи и пр. — для которых принудительное охлаждение невозможно, ввиду чего наличие даже небольшого перерегулирования требует длительного времени на охлаждение [8].
Одним из возможных решений данной проблемы является построение адаптивных систем управления технологическими процессами [6], автоматически подбирающих коэффициенты ПИД-регулятора. Всю совокупность методов построения таких систем можно разбить на две группы. Первая группа — это классические методы, такие как метод Циглера-Никольса [9], частотный метод А.Г. Александрова [5], метод, заложенный в основу работы адаптивных ПИД-регуляторов фирмы Siemens [8]. Вторая группа - это методы основанные на методологии искусственного интеллекта. Анализ некоторых из них предложен авторами в [1, 4].
Одно из возможных направлений предложил Сигеру Омату в [7]. Он в своих исследованиях использовал методологию нейронных сетей (НС). Это связано с тем, что НС обладают нелинейными свойствами и способностью к обучению, что придает адаптивные свойства нейросетевым системам управления. В указанной работе было предложено несколько схем нейроуправления.
Экспериментально было установлено, что наиболее реализуемой с практической точки зрения является схема управления на основе автонастройки коэффициентов ПИД-регулятора KP, KI, KD с помощью НС (схема ПИД-нейрорегулятора с самонастройкой, рис. 1, где e — рассогласование).
Рисунок 1. Схема нейросетевого управления с самонастройкой
Такая схема позволяет учитывать нелинейные свойства объекта, не внося значительных изменений в существующую схему управления. Необходимо лишь подключить НС к существующей системе, что существенно снижает стоимость внедрения такой интеллектуальной надстройки.
В нашем случае в качестве предмета исследований была выбрана схема, приведенная на рис. 1. Осуществлена ее практическая реализация применительно к реальному технологическому объекту и выполнено сравнение результатов ее работы с системой с ПИД-регулятором, в том числе, с точки зрения энергопотребления.
Так как основной задачей при нагреве изделий является удержание уставки в неком допустимом технологией пределе, то и энергоэффективность системы управления будем понимать как количество энергии для обеспечения некоторого графика задания с обеспечением требуемого технологией режима.
1. Реализация схемы управления с нейросетевым оптимизатором
В качестве объекта управления была выбрана муфельная электронагревательная печь типа СНОЛ-1,6.2,5.1/11-И4.
Реализованная система управления муфельной электропечью, функциональная схема которой представлена на рис. 2, состояла из трех уровней управления.
На нижнем уровне находились термопара, измеряющая температуру рабочей зоны печи, и реле, посредством симисторов включающее нагревательный элемент.
Simatic S7-300, осуществлял непосредственное управление муфельной электропечью. Контроллер получал данные от термопары через термопреобразователь, производил их обработку и отправлял на рабочую станцию, от которой он получал значение управляющего воздействия, которое необходимо применить к объекту. В контроллере производилась широтно-импульсная модуляция управляющего воздействия и выдача этого сигнала на исполнительный механизм включения/выключения нагревательного элемента.
Рисунок 2. Функциональная схема системы управления муфельной электропечью
На уровне визуализации находилась рабочая станция с системой визуализации WinCC и пакетом Matlab, в котором реализован ПИД-нейрорегулятор. WinCC и Matlab взаимодействовали между собой через OPC-интерфейс посредством тегов.
Схема управления, реализованная в пакете Matlab, приведена на рис. 3.
WinCC передавала данные о температуре (temperat) и уставку (zadanie) по температуре в Matlab. Запущенная в Matlab НС формировала значение управляющего воздействия (upravl_neu), которое через систему визуализации WinCC поступало в контроллер. Group1, group2 — это OPC блоки для соответственно записи и чтения значений в соответствующих тегах WinCC.
В Matlab реализован ПИД-регулятор (PID) с нейронадстройкой (S-function neuc_PID). Ui, Up, Ud, Upid — сигналы управления на выходе i-, p-, d-каналов и всего ПИД-регулятора соответственно. Блок Saturation2 использован для ограничения получаемого с ПИД-нейрорегулятора сигнала управления до диапазона [0;100] единиц. U — управляющее воздействие, подаваемое на объект управления.
Рисунок 3. Схема управления муфельной электропечью с помощью ПИД-нейрорегулятора
Исходя из технологического регламента для печей нагрева металлургических предприятий, был сформирован график температурного режима нагрева литой заготовки в масштабе 1:2 как по времени, так и по температуре. График смены заданий выглядит следующим образом: 6400С→5050С→5900С и т. д. Для перехода на следующую уставку температура должна была удерживаться в 5 % окрестности задания в течение 30 минут.
Для рассматриваемой пустой печи с помощью идентифицированной ранее модели были подобраны коэффициенты ПИД-регулятора: KP=0.2422, KI=0.0001504, КD=0.
До начала каждого из экспериментов создавалась необученная НС. Она имела трехслойную структуру. Во входном слое расположено 5 нейронов (будут описаны ниже), в выходном слое — три нейрона (отвечают за коэффициенты ПИД-регулятора KP, KI, KD). Экспериментально было установлено, что в данном случае 15 нейронов в скрытом слое является оптимальным числом. В скрытом слое была использована функция активации гиперболический тангенс, в выходном слое — линейная функция.
Нейронадстройка над ПИД-регулятором была реализована при помощи средств пакета Matlab — это S-функция neuС_PID (см. соответствующий блок на рис. 3). Она имеет шесть следующих входов (первые пять совпадают со входами НС): текущее задание по температуре; на 20 секунд и на 40 секунд сигнал по выходу объекта управления; задержанный на 1 секунду сигнал управления после ограничителя; задержанный на 1 секунду сигнал управления до ограничителя.
Внутри функции реализован алгоритм оперативного обучения описанной НС, представляющий собой алгоритм обратного распространения ошибки [7], модифицированный рядом условий. Рассмотрим эти условия подробнее.
2. Модификации, внесенные в схему нейросетевого управления с самонастройкой
Основные дополнения, внесенные в схему С.Омату: 1) внесены ограничения, накладываемые на выходы НС; 2) разработаны правила изменения скорости обучения НС; 3) разработаны правила обучения выхода НС, формирующего p-канал; 4) определено количество эпох обучения НС на каждом такте работы схемы, 5) разработаны правила обучения выхода НС, формирующего i-канал.
Первые четыре модификации подробно описаны в [2, 3]. Рассмотрим детально лишь последний пункт.
2.1 Модификация управления i-каналом
В соответствии с [7] при многократном предъявлении одного и того же задания схема с нейронадстройкой должна обучаться, то есть среднеквадратическое отклонение выхода объекта от задания должно уменьшаться. Однако эксперименты показали, что при использовании постоянной скорости обучения в методе обратного распространения ошибки обучения не происходит.
При этом было установлено, что применение одинаковой скорости обучения для всех нейронов всех слоев неэффективно. Поэтому было предложено использовать для весовых коэффициентов выходного слоя различные скорости обучения. В скрытом же слое было предложено изменять скорость обучения пропорционально от текущего уровня рассогласования. Экспериментально было установлено, что для нейронов, формирующих первый выход (KP), требуется скорость η1=10-5; второй выход (KI) — η2=10-10; третий выход (KD) — η3=10-21.
Для влияния на качество переходного процесса за счет варьирования скоростью прироста интегральной составляющей регулятора в алгоритм управления был внесен ряд условий.
Причем при очередной смене задания определялось, находится ли система в стабильном состоянии. Критерием стабильности являлось следующее: скорость изменения температуры должна быть менее 0,5 градуса за последние 2 такта работы схемы (такт соответствует 20 секундам), а текущее рассогласование — менее трех градусов. Если система стабильна, то текущее задание и текущий сигнал управления сохранялись в специально отведенный массив. Если такое задание уже есть в массиве, то обновлялось соответствующее ему управляющее воздействие. Такие управляющие воздействия принимались как эталонные для соответствующих заданий.
В течение любого переходного процесса при первом пересечении задания фиксировалось значение сигнала управления в i-канале. Если это значение меньше эталонного для текущего задания, то принималось решение об увеличении KI, а если больше — то об уменьшении.
Ускорение обучения i-канала в сторону увеличения начиналось при соблюдении условий: переходный процесс уже достиг своего первого максимума после пересечения задания, скорость изменения температуры за последние 2 такта работы схемы менее 0,5 градуса, а текущее рассогласование больше 3-х градусов. Скорость обучения при этом устанавливалась равной η2=10-8.
Ускорение обучения i-канала в сторону уменьшения начиналось при соблюдении следующих условий: скорость изменения температуры за последние 2 такта работы схемы более 0,5 градуса, а текущее рассогласование больше 3-х градусов. Скорость обучения при этом устанавливалась равной η2=10-8.
3. Результаты экспериментов
В рамках исследования были проведены одинаковые по условиям эксперименты для двух систем управления — для системы с нейросетевым оптимизатором параметров ПИД-регулятора и для обычного ПИД-регулятора. Первоначально использовалась пустая печь для отслеживания следующего графика заданий: 5900С 5900С→6400С→505→5900С. Затем печь загружалась литой заготовкой, объем которой составлял примерно 30 % объема печи, и для нее повторялся указанный график заданий. Затем печь разгружалась, и для нее также повторялся указанный график заданий. Каждый переходный процесс считался завершенным, если после входа в 5 0С окрестность задания проходило 30 минут. Затем происходила смена задания. Для этого был использован счетчик времени. Если выходной сигнал температуры печи выходил за пределы окрестности, то счетчик времени обнулялся, после входа в окрестность — счетчик времени включался.
Нейросетевой оптимизатор начинал эксперимент с известными значениями коэффициентов ПИД-регулятора, указанными ранее как оптимальные для пустой печи. Обычный же ПИД-регулятор всегда использовал только их.
Время эксперимента составило 12,3 часа, расход электроэнергии — 5,39 кВт, суммарный сигнал управления — 57071 единиц, управление в единицу времени — 24,95 единиц. По результатам эксперимента можно сделать вывод, что нейросетевой оптимизатор перенастроил коэффициенты на новый режим работы объекта (загруженная печь), а затем вернул исходные коэффициенты для незагруженной печи. Однако, это заняло некоторое время, поэтому после разгрузки печи наблюдается ухудшение качества переходных процессов.
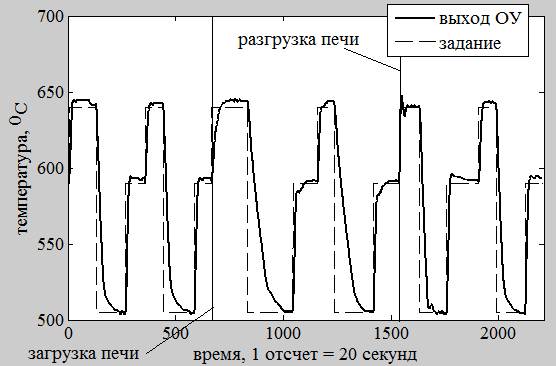
Рисунок 4. Выход объекта управления, управляемого регулятором с нейросетевым оптимизатором
Результаты экспериментов, полученные с использованием обычного ПИД-регулятора, приведены на рис. 5.
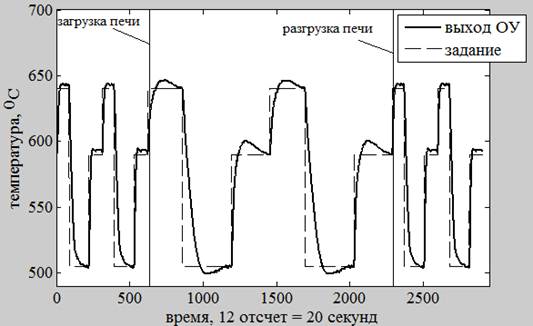
Рисунок 5. Выход объекта управления, управляемого обычным ПИД-регулятором
Время эксперимента составило 16,2 часа, расход электроэнергии — 7,23 кВт, суммарный сигнал управления — 76557 единиц, управление в единицу времени — 26,26 единиц. По результатам эксперимента можно сделать вывод, что коэффициенты, подобранные для пустой печи, не подходят для осуществления управления в режиме загруженной печи, и требуется их перенастройка.
Сравнительные характеристики экспериментов приведены в таблице 1.
Таблица 1.
Сравнительная характеристика результатов экспериментов
|
Критерий оценки |
ПИД+НС |
ПИД |
|
Суммарный сигнал управления за все время опыта |
57071 |
76557 |
|
Энергопотребление, кВт |
5,39 |
7,23 |
|
Время опыта, час |
12,3 |
16,2 |
|
Средний сигнал управления в единицу времени |
24,95 |
26,26 |
Таким образом, в единицу времени экономия составляет 26,26 / 24,95 = 1,05, то есть 5 %.
Указанные выше результаты позволяют сделать вывод о том, что использование нейросетевого оптимизатора параметров ПИД-регулятора для учета нелинейных свойств объекта управления позволило не только сократить энергопотребление на ведение технологического процесса на 5 % в единицу времени, но и снизить время проведения указанного опыта на 4 часа. Таким образом, в условиях реального производства за один и тот же промежуток времени может быть выпущен больший объем продукции.
Заключение
Предлагаемые усовершенствования, внесенные в схему реализации ПИД-нейрорегулятора, позволили обеспечить стабильную работу нейронной сети и ее обучаемость в контуре управления в реальном масштабе времени. Кроме того, при изменении параметров объекта такая обученная (и постоянно оперативно дообучаемая) НС способна за время переходного процесса перенастроить параметры ПИД-регулятора и обеспечить требуемое качество переходного процесса.
Результаты проведенных экспериментов позволяют сделать вывод о том, что созданная нейронадстройка вполне может стать прототипом универсального промышленного аппарата настройки параметров ПИД-регулятора для класса объектов, которые возможно описать апериодическим звеном второго порядка с запаздыванием.
Список литературы:
- Еременко Ю.И., Полещенко Д.А., Глущенко А.И. К вопросу о совершенствовании схемы ПИД-нейрорегулятора с самонастройкой // Системы управления и информационные технологии. — 2012. — № 4(50). — С. 27—31.
- Еременко Ю.И., Полещенко Д.А., Глущенко А.И. Об условиях применения ПИД-нейрорегулятора для управления объектами, описываемыми апериодическим звеном второго порядка с запаздыванием // Приборы и системы. Управление. Контроль. Диагностика. — 2013. — № 6. — С. 39—45.
- Еременко Ю.И., Полещенко Д.А., Глущенко А.И. Синтез системы управления чашевым окомкователем с нейросетевой надстройкой и оценка ее эффективности о
- Еременко Ю.И., Полещенко Д.А., Глущенко А.И. Анализ методов реализации схемы нейросетевого управления с самонастройкой // Приборы и системы. Управление. Контроль. Диагностика. — 2012. — № 6. — С. 50—55.
- тносительно шаговой системы экстремального управления// Мехатроника. Автоматизация. Управление. — 2011. — № 10. — С. 56—61.
- Alexandrov A.G., Palenov M.V Self-tuning PID-I controller // Preprints of the 18th IFAC World Congress. Milano, Italy. 28 Aug. —2 Sept. 2011. —PP. 3635—3640.
- Astrom K.J., Hagglund T., Hang C.C. and Ho W.K. Automatic tuning and adaptation for PID controllers. A survey. // IFAC J. Control Eng.. — 1993. Practice 1. — Pp. 699—714.
- Omatu S., Khalid M., Yusof R. Neuro-Control and its Applications. London: Springer, 1995. —255 p.
- Pfeiffer B.-M. Towards "plug and control": self-tuning temperature controller for PLC // International journal of Adaptive Control and Signal Processing. — 2000. — № 14. — Pp. 519—532.
- Ziegler J., Nichols N. Optimum settings for automatic controllers // Trans. ASME. —1942. —№ 65. —Pp. 759—768.
дипломов