Статья опубликована в рамках: XXIX Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 25 декабря 2013 г.)
Наука: Технические науки
Секция: Электротехника
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

СРАВНИТЕЛЬНЫЕ ИСПЫТАНИЯ ШАССИ КОЛЕСНЫХ РОБОТОВ
Вяльцев Георгий Бенцианович
инженер НГТУ, РФ, г. Новосибирск
Сагитов Юрий Ильдарович
ассистент НГТУ, РФ, г. Новосибирск
WHEELED ROBOT'S CHASSIS COMPARATIVE TESTS
Vyaltsev George Bentsianovich
engineer NSTU, Russia Novosibirsk
Sagitov Yuri Ildarovich
Assistant NSTU, Russia Novosibirsk
АННОТАЦИЯ
В статье проанализированы результаты сравнительных испытаний двух шестиколесных полноприводных автономных (дистанционно-управляемых моделей) роботов. Произведена оценка проходимости двух различных конструкций подвески. Сделаны выводы о преимуществах и недостатках испытанных конструкции.
ABSTRACT
This paper analyzes the results of comparative tests of the two wheel-drive six-wheeled autonomous remote-controlled robots. Patency of two different designs of the suspension is evaluated. Conclusions are about the advantages and disadvantages experienced by the structure.
Ключевые слова: робот; колесное шасси; проходимость.
Keywords: robot; wheeled chassis; patency.
Автономные мобильные роботы в настоящее время приобретают все большее распространение. Во многом такая популярность обусловлена большим ассортиментом готовых деталей и возможностью свободного творчества в области конструирования и прикладного программирования, а также высоким уровнем доступностей компонентов для разработки.
Электронное оборудование для роботов весьма развито и унифицировано. Для создания механической части также существуют различные готовые комплекты и конструкторы. В этих условиях даже не имеющий собственного производственного оборудования коллектив или одиночный исследователь может создавать весьма разнообразные по конструкции и назначению прототипы.
Довольно большую нишу на рынке занимают готовые шасси, как правило, китайского производства. Эти комплекты очень привлекательны для использования благодаря доступности и хорошей рекламе. Производители часто не предоставляют никакой технической информации о своей продукции. Поэтому о реальных качествах того или иного шасси можно судить только по результатам испытаний.
В этой статье рассматривается результат сравнительных испытаний двух близких по конструкции роботов, и анализируются преимущества и недостатки испытываемых конструкций.
В испытаниях принимали участие два робота, созданных в Новосибирском Государственном Техническом Университете. Оба робота имеют трехосную полноприводную конструкцию с приводом каждого колеса от собственного электрического двигателя.
Робот, имеющий внутреннее наименование ЕЖ 3 был создан как дистанционно управляемый разведчик помещений. Фотография этого образца приведена на рисунке 1. При создании этого робота руководствовались соображениями максимальной простоты и прочности. Поэтому предпочтение было отдано корпусу в виде фермы обшитой листовым алюминием. Подрессоривание колес отсутствует. Амортизация осуществляется за счет мягких шин с поролоновым наполнением. Для защиты двигателей между колесом и двигателем на каждую ось установлен подшипник.

Рисунок 1. Робот ЕЖ
Другой робот «МСЦ» создавался сотрудниками студенческого конструкторского бюро «Робототехника и Искусственный Интеллект» для тестирования разрабатываемой приемо-передающей аппаратуры и отработки моделей полуавтономного управления. Фотография приведена на рисунке 2. Этот робот был собран на базе готового шасси DAGU Wild Thumper 6WD [1].
Колеса, аналогичные использованным в конструкции робота ЕЖ, установлены непосредственно на оси электродвигателей (в конструкции использованы двигатели со встроенным в корпус редуктором, т.е. фактически колесо устанавливалось на выходной вал редуктора). Двигатель с колесом подвешивается к раме, со степенью свободы в вертикальной, перпендикулярной с ось робота плоскости и подрессорен в этой плоскости. Такое решение позволяет адаптировать шасси к поверхности дороги, обеспечивая максимальное сцепление. Кроме того рессора защищает подшипник двигателя от ударов в вертикальном направлении.

Рисунок 2. Робот МСЦ
Двигатели были подключены в две ветви — по правому и левому борту. В пределах ветви двигатели соединены параллельно. Технические данные испытываемых роботов сведены в таблицу 1.
Автономный мобильный робот как транспортное средство должен обладать проходимостью, достаточной для преодоления препятствий, встречающихся роботу при выполнении служебных обязанностей. Целью сравнительных испытаний была проверка шасси испытываемых моделей по этому параметру.
Таблица 1.
Технические данные испытываемых роботов
|
|
Еж3 |
«МСЦ» |
Вес |
5 кг |
2 кг* |
Габариты |
35**х30х20 см |
40х25х20 см |
Клиренс |
35 мм |
55 мм |
Колесо |
D=180 мм |
D=180 мм |
Питание |
12 В 5000 мАч |
2 акк. По 12 В 5000 мАч |
Автономность |
1.5 ч |
~4 ч |
Крейсерская скорость |
0.3 м/с (≈1 км/ч) |
1.5 м/с (≈5 км/ч) |
Запас хода |
Около 1.5 км |
неизвестно |
Мощность двигателя |
36Вт х 6 двигателей |
≈40Вт х 6 двигателей |
Номинальная частота вращения двигателя |
130 об/мин |
295 об/мин |
Номинальный момент двигателя |
9,4 кг∙см |
4,кг∙см |
Передаточное число встроенного редуктора |
75:1 |
34:1 |
* Робот испытывался в облегченной конфигурации, со снятыми корпусом и частью бортовых систем.
** 40см со съемным «тараном» / бампером
В качестве наиболее общих препятствий были выбраны ступени обычных типовых лестниц, а также элементы растительного ландшафта. В ходе испытаний были получены следующие результаты.
Спуск по лестницам
Расстояние между краями соседних ступеней типовой лестницы сравнимо с длинной корпуса обеих испытываемых моделей. По этой причине спуск по лестнице представляет определенные трудности.
Лестничная ступень для малоразмерного робота фактически является противотанковым контрэскарпом. Преодоление такого препятствия можно условно разделить на три этапа, как это показано на рисунке 3. На первом этапе робот подходит к краю ступени и вывешивается, приблизительно на половину длинны корпуса (рис. 3 поз. 1). После этого под действием силы тяжести корпус наклоняется и происходит утыкание передними колесами в землю (рис. 3 поз. 2). Если в этот момент проекция центра тяжести робота на грунт (рис. 3 точка А) окажется за осью переднего колеса (рис. 3 точка В), то произойдет переворачивание. В противном случае робот продолжит движение вперед. Простой расчет позволяет легко вычислить предельную высоту преодолеваемой ступени.
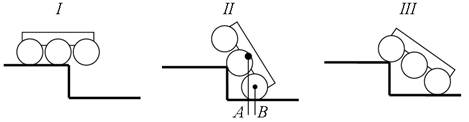
Рисунок 3. Этапы преодоления роботом ступеньки
Визуально робот «МСЦ» имеет более высокий центр тяжести и должен хуже преодолевать данное препятствие. Кроме того за счет особенностей подвески, передние колеса этого робота могут сильно провиснуть вниз на первом этапе, что должно сказаться на дальнейшем процессе спуска.
В действительности за счет меньшей массы и большей скорости робот «МСЦ» успешно преодолел препятствие, разогнавшись и благодаря инерции фактически спрыгнув со ступеней, полностью миновав второй этап и сразу перейдя в положение рис. 3 поз. 3. Также некоторую помощь аппарату оказала несимметричность конструкции — тяжелый блок аккумуляторов в кормовой части, смещающий центр тяжести конструкции назад.
Робот ЕЖ не имея возможности разогнаться произвел спуск с опорой на бортовой «таран» (Рис. 4). Этот «таран» предназначен для помощи в расчистке пути робота в ходе осмотра помещений от небольших объектов — стульев, бытового мусора и т. п. а также для манипуляций с межкомнатными не запираемыми дверями.
В ходе испытаний был также опробован способ спуска диагонально по ступеням (см рис. 5). Этот способ требует большего мастерства от оператора робота, но позволяет аппарату при спуске компенсировать недостаток размера, в достаточной степени, чтобы избежать переворота.

Рисунок 4. Спуск по ступеням с использованием вынесенной опоры

Рисунок 5. Спуск по ступеням диагонально
При утыкании в грунт колес (рис. 3. поз. 2; рис. 5) происходит сильный удар по оси двигателя. Существует опасность повреждения двигателя или оси, которую необходимо учитывать при расчете прочности конструкции робота.
Подъем по лестнице
Лестничная ступень, при преодолении ее роботом, является эскарпом. Из практики использования полноразмерной гусеничной и вездеходной техники эскарп является более сложным препятствием чем контрэскарп. В рекомендациях по вождению танка указано, что для преодоления эскарпа, высота которого существенно больше высоты переднего катка гусеницы, данный эскарп необходимо разрушить ударами гусениц или огнем танкового орудия. Оба эти способа для робота неприменимы. Однако исследуемые роботы существенно отличаются от полноразмерных транспортных средств соотношением массы к мощности двигательной установки. Это позволяет роботу производить подъем передними колесами по вертикальной стене за счет упора задними колесами в грунт.
Препятствием при преодолении ступени становится не сам подъем на ступень, а момент переваливания корпуса через край ступени.
Может создаться впечатление, что для преодоления ступеньки достаточно обеспечить устойчивость робота при заезде средним колесом. Т. е. центр тяжести (рис. 6, поз. 1, точка А) не должен выходить за точку касания земли колесом (рис. 6, поз. 1, точка В). В действительности для стабильного подъема на ступеньку необходимо чтобы центр тяжести оказался за краем верхней ступеньки (рис. 6 поз. 2). Очевидно, что безопасно преодолеваемая высота ступени в этом случае значительно меньше чем при спуске. Если это условие не выполняется, то при подъеме на ступеньку робот остановится в положении, изображенном на рис. 7.
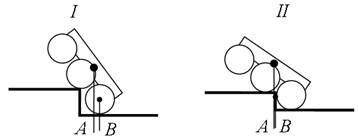
Рисунок 6. Преодоление ступени в направлении вверх
Единственное отличие шасси робота «МСЦ» при преодолении этого препятствия заключается в возможности забросить на ступень одно колесо и подниматься вверх аналогично спуску по диагонали (рис. 5). За счет особенностей подвески робот «МСЦ» при таком подъеме мог касаться нижней ступени двумя-тремя колесами (см. рис. 8), в то время как робот ЕЖ вынужден был бы балансировать на одном колесе.


Рисунок 7. Роботы в процессе преодоления ступени

Рисунок 8. Преимущество использования свободной подвески колес
Для обоих роботов непроходимыми оказались ступени с отрицательным углом наклона вертикальной поверхности ступени.
Тестовая поездка по растительному ландшафту показала, что оба робота имеют примерно одинаковую проходимость. Преодоление травы и корней деревьев не вызвало существенных проблем. Исключением стал единственный досадный инцидент с попаданием сучка в подвеску робота «МСЦ» (см рис. 9).

Рисунок 9. Авария, вызванная открытой конструкцией подвески робота «МСЦ»
Выводы
Анализ результатов сравнительных испытаний показал, что робот «МСЦ» имея с роботом ЕЖ, двигательные установки одинаковой мощности, но будучи вдвое легче и обладая большей скоростью (большее передаточное число редукторов) показывает несколько лучшую проходимость.
Однако механическая уязвимость конструкции подвески этого робота может сказаться в ходе эксплуатации, особенно, в случае установки на эту подвеску более тяжелого корпуса. В этом случае защищенная конструкция робота ЕЖ может оказаться более целесообразной.
Оба робота в ходе испытаний показали свою пригодность для решения поставленных задач.
Список литературы:
1.Сайт фирмы DAGU Electronics // [Электронный ресурс] — Режим доступа. — URL: http://dagurobot.en.made-in-china.com Дата обращения: 01.12.2013.
дипломов