Статья опубликована в рамках: XVI Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 12 декабря 2012 г.)
Наука: Технические науки
Секция: Электротехника
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ПРИМЕНЕНИЕ КОНЕЧНО-ЭЛЕМЕНТНЫХ МОДЕЛЕЙ ДЛЯ ПРОЕКТИРОВАНИЯ ПРИВОДОВ ЭЛЕКТРОМАГНИТНЫХ ДОЗИРУЮЩИХ УСТРОЙСТВ С РАЗЛИЧНОЙ ФОРМОЙ ШТОКА
Геча Владимир Яковлевич
д-р техн. наук, проф. ФГБОУ ВПО «НИУ МЭИ», г. Москва
Мильшин Алексей Юрьевич
аспирант каф. ЭМ ФГБОУ ВПО «НИУ МЭИ», г. Москва
E-mail: milshinau@mail.ru
FINITE ELEMENT MODELS FOR DESIGN DRIVE OF ELECTROMAGNETIC DOSING DEVICES WITH DIFFERENT ROD FORMS
Vladimir Gecha
D. Sc., prof. MPEI, Moscow
Alexey Milshin
Ph.D. student of Electromechanical dep. MPEI, Moscow
АННОТАЦИЯ
В публикации показаны особенности расчета привода электромагнитного дозирующего устройства. Приведены допущения и требования, предъявляемые к таким устройствам. Представлена геометрия и графические зависимости тягового усилия и времени движения от координаты по перемещению для устройств с различной формой штока. Сформулированы выводы.
ABSTRACT
The article shows the features of calculation of electromagnetic dosing device drive. Given the assumptions and requirements for such devices. Represented geometry and figure of traction and motion time from move coordinate. Conclusions.
Ключевые слова: дозирующее устройство; дозатор; рабочий орган; шток; система дозирования.
Keywords: dosing device; dispenser; working body; rod; dosing system.
В последнее время активно развиваются технологии высокоскоростного дозирования жидкостей и газов. В связи с чем, особо остро встала проблема поиска оптимальных принципов и способов управления, конструирования, проектирования и усовершенствования приводов дозирующих устройств. Среди требований, предъявляемые к высокоскоростным дозирующим устройствам, следует выделить: надежность, долговечность, производительность, точность, быстродействие и низкую стоимость изготовления, а так же минимальные затраты на эксплуатацию. Типы приводов дозаторов весьма разнообразны, например: электромагнитный, гидравлический, пневматический, пьезоэлектрический, электродинамический и их комбинации. В дозирующих устройствах, в которых требуется высокая частота подачи доз, наиболее целесообразно использовать приводы электромагнитного типа. Ниже приведены требования, предъявляемые к приводам электромагнитного типа, а именно: частоты срабатывания (1—500 Гц), рабочая температура (–200—600°С), рабочее давление (0—250 МПа).
Разработку и исследование вопросов проектирования электромагнитных механизмов, расчета их магнитных систем [2, с. 77, 92, 103], исследования динамики [2, с. 393] различных устройств с электромагнитным приводом, принято связывать с именами следующих ученых: А.М. Ашавского, А.В. Гордона, М.А. Любчика, Б.Ф. Симонова, В.С. Шейнбаума и др. Среди вопросов, освещенных ими в своих работах, нас наиболее заинтересовали следующие: разработка математических моделей и методик расчета электромагнитных приводов различного конструктивного исполнения [3, с. 47], расчет динамических режимов в электромагнитных механизмах.
Однако, большинство методов расчета применяемых авторами относятся к цепным методам, которые можно считать традиционными для расчета электромагнитных систем. Такие методы применяются достаточно успешно и по настоящее время, но при расчете дают несколько большие погрешности, чем полевые методы.
К современным методам расчета приводов электромагнитных дозирующих устройств, стоит относить полевые методы. Работы Й. Виттенберга, И.П. Иванова, Н.Г. Лысова и ряда других основаны на теории электромагнитного поля и уравнениях Максвелла [1, с. 257]. Полевые методы расчета базируются на универсальных методах численного решения краевых задач, а именно: метод конечных разностей (МКР) и метод конечных элементов (МКЭ). Эти методы сводят решение краевых задач к решению систем алгебраических уравнений, однако для эффективного использования этих методов необходимо четко обозначить границы расчетной области. Метод конечных элементов следует относить к математическому способу численного решения задач, описываемых дифференциальными уравнениями второго порядка в частных производных.
Таким образом, мы считаем, что применение метода конечных элементов для расчета привода электромагнитного дозирующего устройства, как наиболее современного метода расчета, может дать хорошие результаты. В качестве программы для проведения такого расчета предлагается воспользоваться программой Elcut, назначением которой является расчет магнитных полей методом конечных элементов. В работе мы будет рассматривать 3 конструкции привода электромагнитного дозирующего устройства: со свободным ходом, со стопом и с длинным ходом. Зададимся их геометрическими параметрами, на рисунке 1 приведены соответствующие чертежи устройств.
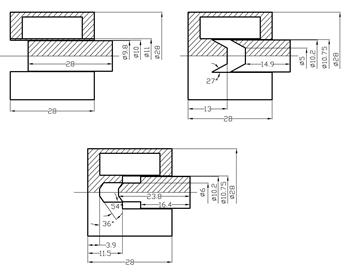
Рисунок 1. Чертежи приводов электромагнитных дозирующих устройств с различной формой штока: а) со свободным ходом, б) с обычным стопом, в) с длинным ходом
Для каждой исполнения привода были получены полиноминальные зависимости тягового усилия от координаты по перемещению (полином 4-ой степени), являющиеся результатом расчета электромагнита методом конечных элементов (Elcut). Эти полиномиальные зависимости сведены в таблицу 1.
Таблица 1.
Полиномиальные зависимости для тягового усилия
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
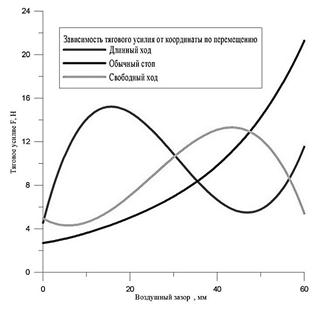
Рисунок 2. Полиноминальные зависимости тягового усилия от координаты по перемещению.
Полученные полиноминальные зависимости для тягового усилия были использованы для построения зависимости времени движения штока привода электромагнитного дозирующего устройства от координаты по перемещению (рисунок 3).
Рисунок 3. Зависимости времени движения от координаты по перемещению
Графические зависимости, представленные на рисунке 3, позволяют провести анализ динамических параметров привода электромагнитного дозатора. Предварительное сравнение результатов расчет значений времени движения в точке 6 мм, показало, наилучшим исполнением для привода электромагнитного дозирующего устройства является «со свободным ходом».
По результатам работы, сформулированы следующие выводы:
1.Наилучшим исполнением для привода электромагнитного дозирующего устройства является исполнение — «со свободным ходом».
2.Эффективность предложенного способ расчета привода электромагнитного дозирующего устройства, с применением моделирования методом конечных элементов в программе Elcut, подтверждается расчетом нескольких разных исполнений для привода электромагнитного дозирующего устройства.
Список литературы:
1.Виттенбург Й. Динамика систем твердых тел. М.: Мир, — 1980.
2.Гордон A.B, Сливинская А.Г. Электромагниты постоянного тока. M.—JI.: Госэнергоиздат, 1960. 447 с.
3.Любчик М.А. Силовые электромагниты аппаратов и устройств автоматики постоянного тока. М.: “Энергия”, 1968. — 152 с.
дипломов