Статья опубликована в рамках: XL Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 19 ноября 2014 г.)
Наука: Технические науки
Секция: Транспорт и связь, кораблестроение
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
НЕКОТОРЫЕ ВОПРОСЫ КОНСТРУКЦИЙ СПУСКО-ПОДЪЕМНЫХ УСТРОЙСТВ ДЛЯ ПОДВОДНЫХ АППАРАТОВ
Быканова Анна Юрьевна
канд. техн. наук, Дальневосточный федеральный университет, РФ, г. Владивосток
CERTAIN QUESTIONS OF LAUNCHING AND RECOVERY APPLIANCE CONSTRUCTIONS FOR UNDERWATER VEHICLES
Anna Bykanova
candidate of Technical Sciences, Far Eastern Federal University, Russia, Vladivostok
АННОТАЦИЯ
В работе рассмотрены особенности спуско-подъемных операций для различных типов подводных аппаратов. Приведены некоторые конструкции специализированных устройств. Предложены перспективные направления усовершенствования конструкций спуско-подъемных устройств.
ABSTRACT
In the article peculiarities of launching and recovery operations for various types of underwater vehicles are considered. Some constructions of special-purpose hardware are mentioned. Development promising directions of launching and recovery appliances are offered.
Ключевые слова: спуско-подъемное устройство (СПУ).
Keywords : launching and recovery appliance.
Многочисленные исследования океана с помощью специализированной подводной техники сопряжены с выполнением операций спуска и подъема вне зависимости от назначения и массогабаритных показателей используемых подводных аппаратов. Указанные операции являются сложными, дорогостоящими и очень ответственными, особенно при выполнении оперативных подводно-технических или поисково-спасательных работ. Срочные работы характерны тем, что на их выполнение не всегда достаточно времени для ожидания идеальных погодных условии и рабочие погружения не редко выполняют при ощутимом волнении моря, ночью, при отрицательных температурах воздуха и т. д. Стоит отметить, что плохие метеоусловия и темное время суток могут наступить и при выполнении плановых работ.
Если проектированию подводных аппаратов уделено достаточное внимание, то к спуско-подъемным устройствам (СПУ), как к вспомогательному оборудованию, необоснованно придают меньшее значение. В мире существуют не один десяток фирм, основное направление которых являются создание СПУ, например, российская компания Обуховское [3]. Свою продукцию подобные компании чаще всего изготавливают в виде универсального устройства под определенный типоразмер аппаратов или под конкретный аппарат. Обзор конструктивных особенностей и условий эксплуатации спуско-подъемных устройств для подводных аппаратов (ПА) дает основание полагать, что задача создания эффективных СПУ для различного класса подводной техники является весьма актуальной.
Работа спускоподъемных устройств в любых режимах всегда ведет к опасности повреждений дорогого подводно-технического оборудования, например, при сильных волнениях возможны удары поднимаемого или опускаемого подводного аппарата об воду или борт судна. Практика показывает, что даже небольшое волнение моря вызывает ощутимую качку обеспечивающего судна, и управление находящимся на палубе спуско-подъемным устройством представляет собой непростую задачу. Достаточно часто возникают ситуации, в которых при спуске подводный аппарат сначала опускают на набежавшую волну, которая в своем максимуме приподымает его вверх, ослабляя при этом грузовой трос, но потом гребень волны сменяется впадиной, и аппарат, не поддерживаемый волной, падает вниз, вызывая при этом резкое натяжение грузового троса. В результате пиковых рывков возможно разрушение места крепления тросов, а также повреждение внутренних систем ПА.
В большинстве случаев при выполнении спуско-подемных работ участие человека не ограничено функциями оператора механизмов СПУ, достаточно часто операции стропления ПА выполняют в ручном режиме. В случаях, когда стыковку и расстыковку подводного аппарата с СПУ производятся за бортом судна, значительные волнения (более 3 баллов) представляет не только неудобство, но и угрозу для работы операторов. Не редкостью в настоящее время является применение грузоподъемных лебедок, крюк которых вручную зацепляют за выступающие из корпуса аппарата рымы. В связи с тем, что все это напрямую сопряжено с опасностью для жизни оператора, очень желательно, чтобы в ПА было предусмотрено его полуавтоматическое стропление. В качестве примера полуавтоматического механизма крепления аппарата к стропам можно указать на расцепители норвежской компании Imenco [4]. На рис. 1а показан сам механизм, на рис. 1б - он же в рабочем состоянии на аппарате Comanche.

Рисунок 1. Расцепитель: а — внешний вид; б — его рабочее положение на ПА
В подводной робототехнике для операций спуска и подъема распространено применение штатного судового грузоподъемного оборудования. Как правило, это механизмы содержащие А- или П-образную раму и лебедку, а также палубный стреловой кран. Наряду с традиционным грузоподъемным оборудованием, существуют оригинальные технические решения. Например, на рис.2 приведено устройство, применяемое для спуско-подъемных операций аппарата Hugin. Здесь конструкция представляет собой сочетание лебедки и направляющей рамы. Несмотря на очевидную привлекательность подобных конструкций, они имеют один существенный недостаток — малая эффективность в условиях качки, т. к. рама будет находиться в непрерывном колебании по вертикали и может повредить аппарат. Для решения указанной проблемы необходимо применять дополнительные методы компенсации качки.


Рисунок 2. СПУ для АНПА Hugin
Стоит отметить тот факт, что относительная простота применения лебедки свойственна только для спусковых операций применительно к АНПА, но не для телеуправляемых необитаемых подводных аппаратов (ТНПА). Для этого класса аппаратов, характерно наличие катушки с кабелем, соединяющим аппарат с постом оператора и снабжающий аппарат питанием. В связи с этим необходимо не только опустить аппарат под воду, но и произвести выпуск его кабеля согласно глубине погружения аппарата. При этом необходимо реализовать синхронность стравливания кабеля ТНПА, грузонесущего троса судовой лебедки и отдельного кабеля управления расцепителем (если он присутствует). Кроме того, в конструкции присутствует устройство контролирующее натяжение кабелей, т. к. если допустить сверхнормативное натяжение кабеля (например, если аппарат под водой движется быстрее, чем происходит выпуск его кабеля), то это может вызвать повреждение узла стыковки кабеля с аппаратом.
Выполнение работ под водой на больших глубинах сопряжено с тем, что аппарат должен погружаться сам и одновременно затягивать за собой на глубину кабель, при этом часть кабеля расходуется только на достижение заданной глубины. Протяженный кабель, попадая в течения, а также увлекаемый за собой подводным аппаратом создает дополнительное сопротивление движению ПА. Это снижает эффективность применения ТНПА на больших глубинах. Поэтому здесь очень перспективным техническим решением считают применение подводных гаражей. Вся суть конструкции состоит в том, что ТНПА с катушкой кабеля находятся в защитном водопроницаемом коробе (гараже). Гараж опускается с помощью грузоподъемной лебедки на заданную рабочую глубину, далее ТНПА выходит из подводного гаража и производит свою миссию [2, c. 22]. На рис. 3а и 3б представлены робототехнические комплексы, содержащие подводные гаражи.
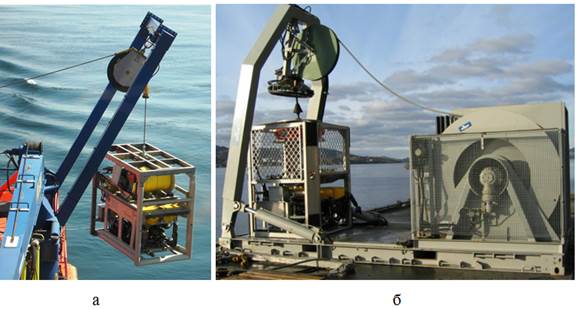
Рисунок 3. Комплексы с подводным гаражом: а — погружение ТНПА Comanche ; б — СПУ компании “Lawson Engineers Ltd”
В рассмотренных примерах применения гаражей наряду с очевидными преимуществами заметен существенный недостаток — это значительное увеличение массогабаритных показателей погружаемого комплекса. В связи с этим необходимо применять более мощные лебедки, а размеры П- или А-рамы судна должны быть подходящими для столь габаритной конструкции, и , как следствие, приводные механизмы рам необходимо выполнять более грузоподъемными. Все это критично для судов небольшого размера, но на крупных исследовательских судах палубные лебедки и рамы рассчитаны на работу с крупногабаритными и тяжелыми грузами.
Приведенные ранее операции спуска аппаратов на воду являются технически непростыми, но реализация подъема ПА на палубу судна — задача намного сложнее. Особенно это сказывается при попытке исключить из операции подъема ручную стыковку аппарата к СПУ. Поэтому существуют технические решения, основанные на принципе стыковки аппаратов на специализированный подводный ложемент, связанный грузонесущим тросом с судном обеспечения. Наведение ТНПА на месторасположение подводного ложемента производят различными способами, например, по акустическому сигналу, а далее с помощью различных ловителей и прочих механизмов, расположенных на ТНПА, производят постановку аппарата на ложемент. Состыкованный с ложементом ТНПА поднимают из воды на судно-носитель подобно поднятию подводного гаража. Также благодаря тому, что у телеуправляемых аппаратов в контуре управления всегда находится человек-оператор, а на аппарате расположены видеоустройства, процессом стыковки может управлять человек-оператор в режиме реального времени. А в случае применения подводных гаражей, где аппарат, и гараж связаны кабелем, возврат ТНПА и заход его в гараж возможно производить полностью в автоматическом режиме.
Для автономных аппаратов такой возможности нет. В связи с этим для АНПА разрабатывают отличные от указанных методы стыковки. В настоящее время множество работ производят в направлении дальнейшего развития систем технического зрения на ПА, позволяющего выполнять идентификацию подводных объектов и организовывать приведение аппарата к стыковочному модулю на основе обнаружения искусственных ориентиров расположенных на нем [1, c. 29]. В качестве ориентиров могут быть искусственные объекты правильной формы, например, светодиодный круг как ориентир для входа в зону стыковки и т. д. В любом случае задача подводной стыковки АНПА с СПУ является чрезвычайно сложной. Большую роль в эффективности работы стыковочного модуля здесь играет совокупность разработанной конструкции модуля и программного обеспечения управления ПА. Примером стыковочного модуля может быть механизм, так называемый «конус-ловитель», приведенный на рис. 4.
Рисунок 4. Приведение ПА к подводному стыковочному модулю
Указанные в работе способы и средства проведения спуско-подъемных операций для ПА являются незначительной частью из всего разнообразия технических решений в направлении СПУ для подводной робототехники, но наиболее распространенной.
Более широкий анализ спуско-подъемных операций показывает, что расстыковку ПА и СПУ в операциях спуска для любого типа подводной техники возможно производить как в ручном, так и в полуавтоматическом режимах. В операциях подъема стыковку находящегося в воде ТНПА к СПУ также можно выполнить вручную или автоматически, а стыковку АНПА к СПУ с воды в подавляющем большинстве случаев выполняют вручную.
Обобщая приведенные в работе замечания относительно конструкций, алгоритмов управления и требований максимальной безопасности при эксплуатации спуско-подъемных устройств можно сделать вывод, что особо значимые вопросы, решение которых позволит создать более эффективные СПУ в настоящее время следующие:
1. Автоматизация стыковки/расстыковки ПА и СПУ.
2. Усовершенствование алгоритмов наведения ПА к стыковочному модулю.
3. Создание надежного расцепителя.
4. Компенсация бортовой качки.
В заключении следует отметить, что необходим комплексный подход в решении задачи создания эффективных СПУ, заключающийся не только в применении оригинальных конструкций и алгоритмов управления сложными объектами, но и в расширении спектра применения накопленных знаний в области технического зрения, использовании современных технологий и материалов, а также интеграции научных знаний с практическим опытом.
Список литературы:
1.Борейко А.А., Воронцов А.В., Кушнерик А.А., Щербатюк А.Ф./ Алгоритмы обработки видеоизображений для решения некоторых задач управления и навигации автономных необитаемых подводных аппаратов//Подвод. исследования и робототехника. — 2010. — № 1(9). — С. 29—39.
2.Костенко В.В., Мокеева И.Г. Исследование влияния кабеля связи на маневренность телеуправляемого аппарата//Подвод. исследования и робототехника. — 2009. — № 1(7). — С. 22—27.
3.Обуховское//сайт компании [Электронный ресурс] — Режим доступа. — URL: http://www.obuhovskoe.ru/katalog-oborudovaniya/kompleksy-sudovogo-oborudovaniya/spusko-podemnye-kompleksy.html / (дата обращения 11.10.2014).
4.Imenco//сайт компании [Электронный ресурс] — Режим доступа. — URL: http://imenco.no/products-services/subsea-lifting-handling/rov-lifting-products/rov-latches/ (дата обращения 20.10.2014).
дипломов