Статья опубликована в рамках: XIX Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 20 марта 2013 г.)
Наука: Технические науки
Секция: Приборостроение, метрология, радиотехника
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

КОМПЕНСАЦИЯ МУЛЬТИПЛИКАТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ С УЧЕТОМ ПОЛОЖИТЕЛЬНОЙ НЕЛИНЕЙНОСТИ ТЕМПЕРАТУРНОЙ ХАРАКТЕРИСТИКИ ВЫХОДНОГО СИГНАЛА ДАТЧИКА
Тихоненков Владимир Андреевич
канд. техн. наук, Ульяновский государственный технический университет Ульяновск
Солуянов Денис Александрович
аспирант Ульяновского государственного технического университета Ульяновск
E-mail:
COMPENSATION OF MULTIPLICATIVE TEMPERATURE ERROR OF GAUGE WITH TAKING INTO ACCOUNT POSITIVE NONLINEARITY OF SIGNAL OUTPUT TEMPERATURE CHARACTERISTIC
Tihonenkov Vladimir Andreevich
Candidate of Technical Sciences Ulyanovsk state technical university Ulyanovsk
Soluyanov Denis Aleksandrovich
Postgraduate student of Ulyanovsk state technical university Ulyanovsk
АННОТАЦИЯ
Данная статья посвящена вопросу компенсации мультипликативной температурной погрешности тензорезисторного датчика с учетом положительной нелинейности температурной характеристики выходного сигнала датчика.
ABSTRACT
This article focuses on the question of compensation multiplicative temperature inaccuracy gauge sensor based on positive temperature characteristic nonlinearity of sensor signal output.
Ключевые слова: тензорезистор; мультипликативная погрешность; компенсация; нелинейность; температура; выходной сигнал.
Keywords: gauge; multiplicative inaccuracy; compensation; nonlinearity; temperature; signal output.
Современные системы контроля и управления в различных отраслях промышленности предъявляют высокие требования к точности и стабильности средств измерения.
Большое распространение в данной области получили тензорезисторные датчики. Одним из наиболее мощных дестабилизирующих факторов тензодатчиков является температура. Компенсация температурной погрешности является одной из приоритетных задач при разработке и изготовлении тензорезисторных датчиков.
В настоящее время предложены способы компенсации температурной погрешности, которые позволяют учесть нелинейность температурной характеристики девиации выходного сигнала датчика благодаря использованию микропроцессоров. Один из них основан на использовании двух каналов: информационного и температурного [2]. Для подобного решения характерны следующие недостатки:
1. усложнение измерительной схемы из-за наличия двух измерительных каналов;
2. высокие требования к точности и стабильности канала измерения температуры;
3. разница между среднеинтегральной температурой тензорезисторов измерительного канала и температурой, воспринимаемой вторым каналом, может составлять десятки градусов;
4. значительная температурная погрешность при нестационарных тепловых режимах эксплуатации из-за разности температур измерительного и температурного канала;
5. уменьшение частотного диапазона измеряемого физического параметра, которое вызвано необходимой цифровой обработкой измерительной информации.
В другом способе мостовую цепь используют в качестве дополнительного канала, измеряющего температуру [1]. Подобное решение устраняет дополнительную температурную погрешность, вызванную нестационарным тепловым режимом, но не решает вопрос возникновения температурной погрешности. В этом случае селективность датчика к измеряемой физической величине приводит к уменьшению чувствительности дополнительного канала к температуре на 1—2 порядка по сравнению с предыдущим случаем. В результате снижается нижний порог чувствительности температурного канала, что не позволяет получить требуемую точность компенсации температурной погрешности.
Существующие схемные способы компенсации температурной погрешности лишены данных недостатков, но не позволяют учесть нелинейность температурной характеристики девиации выходного сигнала датчика в рабочем диапазоне температур. По этой причине ведется разработка схемных способов, которые позволят учесть нелинейность температурной характеристики датчика.
В [3] предлагаются схемные способы компенсации мультипликативной температурной погрешности с учетом нелинейности температурной характеристики девиации выходного сигнала датчика. В данных способах компенсационные резисторы могут включаться как в диагональ питания, так и в выходную диагональ. Главным недостатком данных схемных способов является то, что они обеспечивают при компенсации мультипликативной температурной погрешности учет только отрицательной нелинейности температурной характеристики девиации выходного сигнала датчика, удовлетворяющей неравенству ![]() где
где ![]() — температурный коэффициент чувствительности (ТКЧ) мостовой цепи при температуре t+, соответствующей верхнему пределу рабочего диапазона температур,
— температурный коэффициент чувствительности (ТКЧ) мостовой цепи при температуре t+, соответствующей верхнему пределу рабочего диапазона температур, ![]() — ТКЧ мостовой цепи при температуре t–, соответствующей нижнему пределу рабочего диапазона температур.
— ТКЧ мостовой цепи при температуре t–, соответствующей нижнему пределу рабочего диапазона температур.
Таким образом, встал вопрос о разработке схемных способов для компенсации мультипликативной температурной погрешности при положительной нелинейности температурной характеристики девиации выходного сигнала датчика.
Введем ряд понятий, необходимых для последующего рассмотрения компенсации мультпликативной температурной погрешности схемным путем. Обозначим температурный коэффициент чувствительности тензорезисторов при температуре t+, соответствующей верхнему пределу рабочего диапазона температур, как ![]() а при температуре t–, соответствующей нижнему пределу рабочего диапазона температур —
а при температуре t–, соответствующей нижнему пределу рабочего диапазона температур — ![]() Нелинейность зависимости чувствительности тензорезисторов от температуры можно характеризовать выражением
Нелинейность зависимости чувствительности тензорезисторов от температуры можно характеризовать выражением ![]()
Как показано в [3] Δαдо включает в себя две составляющие:
1. нелинейность, вносимая тензорезисторами, установленными на упругом элементе, которая может принимать как отрицательное, так и положительное значение;
2. нелинейность, вносимая мостовой измерительной схемой, которая всегда является отрицательной при использовании мостовой цепи.
Таким образом, в соответствии с пунктом 2, изменяя составляющую нелинейности, вносимую мостовой измерительной схемой, можно получить смещение нелинейности ТКЧ мостовой цепи в область отрицательных значений. Для этого следует включить в диагональ питания мостовой цепи термонезависимый резистор Ri.
В данном случае, в соответствии с [3], выходное напряжение мостовой цепи после включения резистора Ri при воздействии температуры может быть представлено следующим образом:
![]() (1)
(1)
где: Uвыхt — выходное напряжение мостовой цепи при воздействии температуры;
Uпит — напряжение питания мостовой цепи;
k = R1 / R2 = R3 / R4 — коэффициент симметрии мостовой цепи;
Rвх — входное сопротивление мостовой цепи датчика;
αвх — температурный коэффициент сопротивления (ТКС) входного сопротивления мостовой цепи;
Δt = t - t0 — изменение температуры;
αд — ТКЧ тензорезисторов;
Ri — номинал термонезависимого резистора, включенного в цепь питания;
t — воздействующая температура;
t0 — нормальная температура;
εj — относительное изменение сопротивления плеча Rj мостовой цепи.
Анализ знаменателя зависимости (2) позволяет сделать следующие выводы:
1. После включения резистора Ri у зависимости напряжения питания от температуры будет составляющая, обратно пропорциональная росту температуры, что приведет к смещению зависимости Δαдо в сторону отрицательных значений;
2. С ростом ТКС входного сопротивления мостовой цепи смещение Δαдо в сторону отрицательных значений возрастает.
В соответствии с п. 1 — п. 2 преобразовать положительную нелинейность температурной характеристики выходного сигнала в отрицательную можно двумя способами:
1. Схема 1: включение резистора Ri в диагональ питания;
2. Схема 2: шунтирование входного сопротивления мостовой цепи термозависимым резистором Rαвх и термонезавсимым резистором Rдвх, которые соединены друг с другом последовательно, с целью увеличения ТКС входного сопротивления при наличии резистора Ri.
Поскольку, как упоминалось выше, включение компенсационных резисторов в выходную диагональ позволяет произвести компенсацию мультипликативной температурной погрешности с учетом отрицательной нелинейности температурной характеристики выходного сигнала датчика, то после преобразования положительной нелинейности температурной характеристики выходного сигнала в отрицательную с использованием схемы 1 или 2 возможна последующая компенсация мультипликативной температурной погрешности в соответствии с [3] путем включения термозавимых и термонезависимых резисторов в выходную диагональ мостовой цепи датчика.
На основе численного эксперимента были установлены области применения обеих схем преобразования нелинейности температурной характеристики выходного сигнала, представленные на рис. 1. Как видно из рис. 1, каждая схема не позволяет охватить всю область возможных значений физических параметров металлопленочных датчиков, а области применения схемы 1 и 2 перекрываются. По этой причине был предложен схемный способ компенсации мультипликативной температурной погрешности с учетом положительной нелинейности температурной характеристики выходного сигнала датчика, описанный ниже.
Определяют ![]()
![]() вычисляют Δαдо. Если величина Δαдо является положительной, то определяют
вычисляют Δαдо. Если величина Δαдо является положительной, то определяют ![]()
![]() и вычисляют Δαд. При температуре t+ определяют ТКС входного сопротивления мостовой цепи
и вычисляют Δαд. При температуре t+ определяют ТКС входного сопротивления мостовой цепи ![]() а при температуре t– — ТКС
а при температуре t– — ТКС ![]() Если параметры датчика принадлежат области применения схемы 1, то вычисляют номинал резистора Ri, который обеспечит выполнение неравенства Δαдо ≤ -2,0 · 10-6 1/°C и, как следствие, последующую компенсацию мультипликативной температурной погрешности в соответствии с [3]. Для определения номинала Ri решают уравнение:
Если параметры датчика принадлежат области применения схемы 1, то вычисляют номинал резистора Ri, который обеспечит выполнение неравенства Δαдо ≤ -2,0 · 10-6 1/°C и, как следствие, последующую компенсацию мультипликативной температурной погрешности в соответствии с [3]. Для определения номинала Ri решают уравнение:
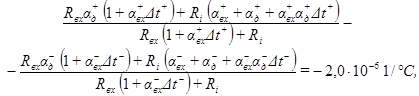
где: ![]() — ТКЧ тензорезисторов при температуре t+,
— ТКЧ тензорезисторов при температуре t+,
![]() — ТКЧ тензорезисторов при температуре t–,
— ТКЧ тензорезисторов при температуре t–,
Δt+ = t+ - t0 — положительный диапазон температур,
Δt– = t– - t0 — отрицательный диапазон температур.
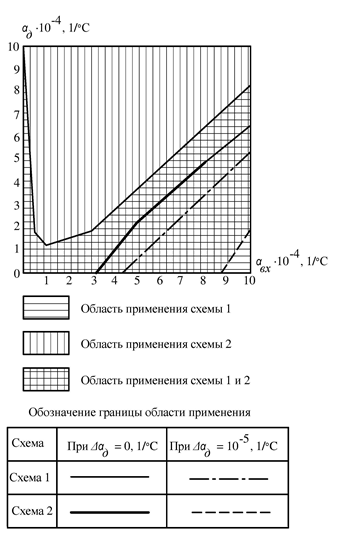
Рисунок 1. Области применения схемы 1 и схемы 2
Если параметры датчика принадлежат области применения схемы 2, то принимают номинал резистора Ri = 100 Ом, величину сопротивления шунта равной сопротивлению входному сопротивлению мостовой цепи (Rш = Rαвх + Rдвх = Rвх), определяют номиналы резисторов Rαвх и Rдвх, обеспечивающих выполнение неравенства Δαдо ≤ -2,0 · 10-6 1/°C и последующую компенсацию мультипликативной температурной погрешности в соответствии с [3]. Для определения номинала резистора Rαвх решают уравнение:
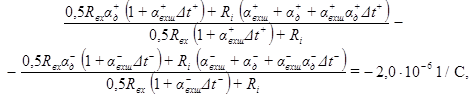
где: ![]() — ТКС входного сопротивления мостовой цепи после шунтирования;
— ТКС входного сопротивления мостовой цепи после шунтирования;
![]() — ТКС шунта, образованного последовательным включением резисторов Rαвх и Rдвх.
— ТКС шунта, образованного последовательным включением резисторов Rαвх и Rдвх.
Номинал резистора Rдвх определяют по формуле:
Rдвх = Rш - Rαвх.
После определения номиналов резисторов Rαвх, Rдвх и Ri включают резисторы с вычисленными номиналами в диагональ питания мостовой цепи в соответствии с выбранной схемой. Определяют ![]()
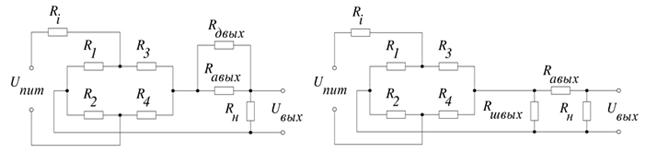
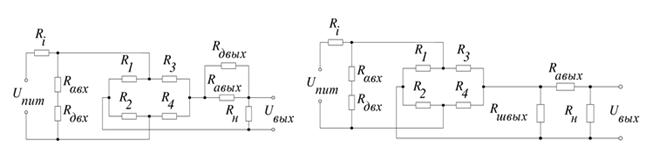
![]() вычисляют Δαдо и производят дальнейшую компенсацию мультипликативной температурной погрешности с учетом полученной отрицательной нелинейности температурной характеристики выходного сигнала датчика в соответствии с [3] путем включения термозависимого резистора Rαвых, а также термонезависимого резистора Rдвых или Rшвых. В результате электрические схемы при компенсации мультипликативной температурной погрешности с использованием схемы 1 примут вид, представленный на рис. 2, а при использовании схемы 2 — представленный на рис. 3.
вычисляют Δαдо и производят дальнейшую компенсацию мультипликативной температурной погрешности с учетом полученной отрицательной нелинейности температурной характеристики выходного сигнала датчика в соответствии с [3] путем включения термозависимого резистора Rαвых, а также термонезависимого резистора Rдвых или Rшвых. В результате электрические схемы при компенсации мультипликативной температурной погрешности с использованием схемы 1 примут вид, представленный на рис. 2, а при использовании схемы 2 — представленный на рис. 3.
а) б)
Рисунок 2. Компенсация мультипликативной температурной погрешности с применением схемы 1
а) б)
Рисунок 3. Компенсация мультипликативной температурной погрешности с применением схемы 2
Список литературы:
1.Дружинин А.А. Многофункциональный датчик давления и температуры на основе твердых растворов SiGe [текст]/ А.А. Дружинин, И.П. Островский, С.Н. Матвиенко, А.М. Вуйцик// Технология и конструирование в электронной аппаратуре.— 2005.— № 6.— С. 24—26.
2.Пат. 2199088 Российская Федерация, МПК G 01 D 3/02, G 01 R 35/00. Способ коррекции статических характеристик измерительных преобразователей/ М. З. Асадуллин, Ф. М. Аминев,В. Ф. Галиакбаров, С. В. Емец, В. Д. Ковшов, Г. Е. Коробков, И. Н. Полищук — № 2002121952/28(023559); заявл. 11.04.02; опубл. 20.02.03, Бюл. № 5.
3.Пат. 2450244 Российская Федерация, МПК G 01 B 7 / 16 Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликаивной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала датчика / Тихоненков В. А., Винокуров Л. Н.; заявитель и патентообладатель Ульяновский государственный технический университет. — № 2010142322/28; заявл. 15.10.2010; опубл. 10.05.2012, Бюл. № 13.
дипломов