Статья опубликована в рамках: X Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 28 мая 2012 г.)
Наука: Технические науки
Секция: Горная и строительная техника и технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ВРАЩАТЕЛЬНО-ПОДАЮЩЕГО МЕХАНИЗМА С ЭЛЕКТРОМАГНИТНОЙ ПОДАЧЕЙ РАБОЧЕГО ОРГАНА БУРОВОГО СТАНКА
Шигин Андрей Олегович
канд. техн. наук, Сибирский федеральный университет, г. Красноярск
Гилев Анатолий Владимирович
д-р техн. наук, Сибирский федеральный университет, г. Красноярск
Шигина Анна Александровна
соискатель, Сибирский федеральный университет, г. Красноярск
THE FEASIBILITY STUDY ON THE ROTARY SUBMITTING MECHANISM WITH ELECTROMAGNETIC GIVING OF WORKING BODY OF THE DRILLING RIG
Shigin Andrey Olegovich
cand. tech. sciences, Siberian federal university, Krasnoyarsk
Gilev Anatoliy Vladimirovich
doctor tech. sciences, Siberian federal university, Krasnoyarsk
Shigina Anna Aleksandrovna
Siberian federal university, Krasnoyarsk
НИР выполнена в рамках реализации ФЦП «Научные и научно-педагогические кадры инновационной России» на 2009—2013 г.г.
АННОТАЦИЯ
Оценка напряженного состояния опор шарошечных долот при бурении горных пород со сложной структурой показывает их низкий расчетный ресурс. Для увеличения ресурса, разработан адаптивный вращательно-подающий механизм и лабораторный стенд для исследования механических его характеристик при различных режимах работы. Произведен расчет ориентировочной потребляемой мощности двигателя. Сделаны выводы об эффективности применения линейного трехфазного асинхронного двигателя с массивным ротором в качестве привода подачи при бурении сложноструктурных горных массивов.
ABSTRACT
The assessment of a tension of support of roller bit chisels when drilling rocks with difficult structure shows their low settlement resource. For increase in a resource, the adaptive rotary submitting mechanism and the laboratory stand is developed for research of its mechanical characteristics at various operating modes. It is settled an invoice rough power consumption of the engine. Conclusions are drawn on efficiency of use of the linear three-phase asynchronous engine with a massive rotor in quality of a drive of giving when drilling a rocks with difficult structure.
Ключевые слова: Бурение сложноструктурных массивов; напряженное состояние шарошечных долот; максимальный ресурс; электромагнитный привод подачи; асинхронный двигатель
Keywords: Drilling of rocks with difficult structure; tension of roller bit chisels; maximum resource; electromagnetic drive of giving; asynchronous engine
В настоящее время в горной промышленности применяются буровые станки с различными типами вращательно-подающих механизмов. Их особенности характеризуются величиной усилия подачи, частотой вращения бурового става и др. Но при бурении сложноструктурных массивов горных пород, имеющих колебание физико-механических свойств по глубине, часто возникают значительные ударные нагрузки и вибрация, результатом которых является увеличение циклических напряжений во всем буровом органе. При этом 80 % случаев отказов приходится на разрушение опор качения шарошек буровых долот [9]. Часто из анализа наработок на отказ шарошечных долот следует вывод о значительном снижении их стойкости (до 2-х раз) в случае бурения породы со сложной структурой.
В конструкции современных шарошечных долот, имеющих опоры качения часто применяются подшипники по схеме ролик-шарик-ролик. Предел прочности сталей тел качения составляет 1900—2300 МПа и выше. Для получения высших показателей необходимо осуществлять термическую обработку с большой точностью в температурах и времени выдержки [1]. Расчеты показывают, что напряжение в телах качения при равномерном нагружении 1400—1650 МПа. Но при значительных колебаниях физико-механических свойств породы доходит до 2250 МПа и выше.
Для приближения ресурса шарошечных долот к максимально возможному, имеющему место при бурении однородной породы, необходимо применение адаптивного вращательно-подающего механизма [4, 8]. Он позволит использовать узкий промежуток между уровнем напряжения в телах качения и предельными прочностными показателями материала.
Отечественные станки шарошечного бурения имеют в системе подачи нерегулируемые гидроприводы [2]. И при изменении свойств горной породы исключить внезапную ударную нагрузку практически невозможно. На изменение свойств породы уже позже реагирует машинист. Но в течение указанного переходного процесса буровой инструмент испытывает сложнейшие по характеру и величине нагрузки. Вследствие чего стойкость буровых долот значительно снижается.
Из анализа существующих электрических машин вращательного и линейного действия можно сделать вывод, что из соображений прочности, простоты конструкции, удобства токоподвода и применения источников переменного напряжения для питания электрических установок буровых станков, наиболее предпочтительным является асинхронный двигатель с массивным ротором [6]. Вследствие сильно выраженного поверхностного эффекта вихревые токи протекают в сравнительно тонком слое на глубине проникновения электромагнитного поля в тело ротора. Эквивалентная глубина проникновения зависит от частоты перемагничивания ротора. Для двигателя, рассчитанного на частоту 50 Гц, эквивалентная глубина проникновения при пуске (s=1) составляет только 1–3 мм, в рабочем режиме при s=0,05 — примерно 5–15 мм. Вообще в линейном приближении глубина проникновения изменяется обратно пропорционально. Это приводит к соответствующему изменению сечения слоя, по которому протекают вихревые токи, активного сопротивления массивного ротора.
В результате такого проявления с массивным ротором поверхностного эффекта пусковой момент в двигателе с массивным ротором достаточно велик, и он уступает двигателю с короткозамкнутой обмоткой на роторе только по своим рабочим свойствам — КПД и коэффициенту мощности. Объясняется это тем, что в номинальном режиме при скольжении s=0,1–0,5 глубина проникновения тока и потока в тело ротора еще достаточно мала, а электрическое сопротивление для тока и магнитное сопротивление для потока велики, вследствие чего двигатель имеет большие электрические потери в роторе и большой намагничивающий ток.
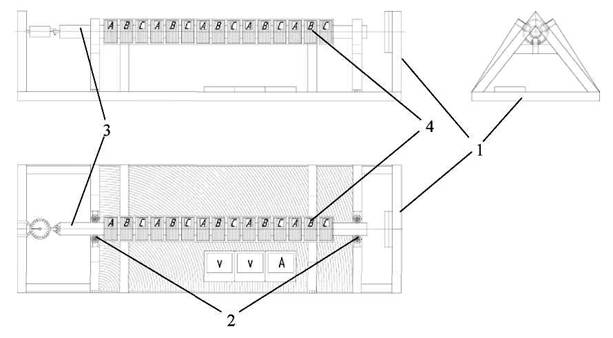
Рис. 1 – Схема экспериментальной установки с трехфазным асинхронным линейным двигателем
Схема экспериментальной установки с трехфазным асинхронным линейным двигателем представлена на рис. 1. Стенд состоит из стальной рамы 1 с роликовыми опорами 2, в которых подвижно закреплен массивный ротор 3 в виде стальной магнитной трубы. Статор 4 в виде цилиндрических обмоток расположен вокруг массивного ротора 3 с возможностью продольного перемещения последнего внутри статора. Катушки статора могут подключаться попеременно, как показано на рисунке по одной или несколько штук, на каждую фазу. Таким образом, стенд позволяет проанализировать режимы работы двигателя. Для этого он оснащен динамометром для измерения усилия подачи, а также приборами для измерения тока и напряжения в определенных фазах. Двигатель стенда не имеет магнитопровода для получения характеристик, зависящих от минимального числа факторов. Двигатель подключается к сети переменного трехфазного напряжения 380 В.
В результате начальных испытаний выяснено, что при потребляемой мощности 6,35 кВт и при нулевой скорости двигатель развивал усилие с учетом погрешности приборов 80—90 Н. Без нагрузки двигатель развивал линейную скорость 0,31 м/с.
Механическая характеристика асинхронной машины линейного действия имеет схожий вид с аналогичной характеристикой асинхронного двигателя вращательного действия. Наличие краевых эффектов при достаточно большой длине массивного ротора оказывает меньшее влияние [6]. Активное r2 и индуктивное ![]() сопротивления массивного ротора ввиду сильно выраженного поверхностного эффекта значительно зависят от скольжения. Так, в случае f1=50 Гц при пуске (S=1) эквивалентная глубина проникновения токов в роторе составляет только 3 мм, при S=0,02 – около 20 мм, при S=0,001 – около 100 мм [5]. Поэтому при пуске сопротивление r2 весьма велико и
сопротивления массивного ротора ввиду сильно выраженного поверхностного эффекта значительно зависят от скольжения. Так, в случае f1=50 Гц при пуске (S=1) эквивалентная глубина проникновения токов в роторе составляет только 3 мм, при S=0,02 – около 20 мм, при S=0,001 – около 100 мм [5]. Поэтому при пуске сопротивление r2 весьма велико и ![]() мало, а с уменьшением скольжения сопротивление r2 уменьшается, а
мало, а с уменьшением скольжения сопротивление r2 уменьшается, а ![]() – увеличивается.
– увеличивается.
В результате сильного проявления поверхностного эффекта пусковой момент двигателя с массивным ротором достаточно велик. Однако двигатели малой мощности с массивными роторами при f1=50 Гц имеют низкие кпд и коэффициент мощности. Но с увеличением мощности растет также и кпд.
Массивный ротор имеет большое преимущество в прочности. В связи с этим асинхронные двигатели с массивным ротором вполне могут применяться в качестве привода подачи рабочего органа бурового станка.
Поскольку двигатель в лабораторном стенде не имеет магнитопровода, необходимо рассчитать номинальное подающее усилие в случае наличия магнитопровода, изготовленного из электротехнической стали. А затем найти мощность двигателя, способного создавать подающее усилие до 200 или 300 кН в зависимости от модели бурового станка. Для этого необходимо рассчитать магнитное сопротивление цепи в случае с магнитопроводом и без.
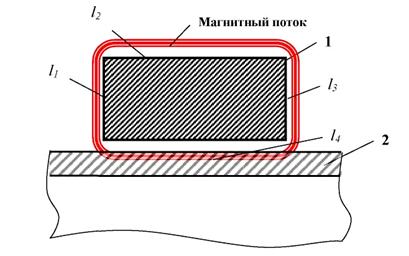
Рис. 2 – Схема магнитной цепи одной обмотки статора линейного асинхронного двигателя с массивным ротором без магнитопровода. Здесь 1 – обмотка статора, 2 – массивный ротор в виде стальной трубы l1, l2, l3, l4 – участки магнитной цепи.
Схемы магнитной цепи одной обмотки статора линейного асинхронного двигателя с массивным ротором без магнитопровода и с магнитопроводом показаны на разрезе тороидальной обмотки соответственно на рис. 2 и рис. 3.
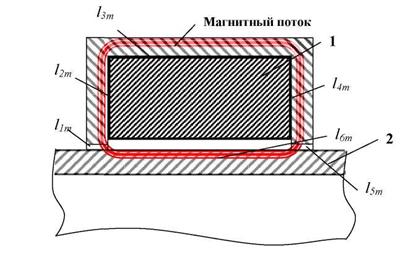
Рис. 3 – Схема магнитной цепи одной обмотки статора линейного асинхронного двигателя с массивным ротором с магнитопроводом. Здесь 1 – обмотка статора, 2 – массивный ротор в виде стальной трубы l1m, l2m, l3m, l4m, l5m, l6m – участки магнитной цепи с магнитопроводом.
Магнитное сопротивление участка цепи определяется из известного выражения [3]
 Гн-1,
Гн-1,
где Rm – магнитное сопротивление участка цепи, Гн-1; l – длина участка магнитной цепи, м; μ0 – магнитная постоянная, Гн/м; μr – магнитная проницаемость вещества участка магнитной цепи; S – площадь поперечного сечения участка магнитной цепи, м2.
Магнитное сопротивление цепи без магнитопровода определяется следующим образом

Длины участков магнитной цепи без магнитопровода (рис. 2)
l1=0,02 м; l2=0,06 м; l3=0,02 м; l4=0,06 м. Магнитная проницаемость вещества участков магнитной цепи [7] μr1=1 (воздух); μr2=1 (воздух); μr3=1 (воздух); μr4=3500 (среднеуглеродистая сталь 45). Площади поперечного сечения участков магнитной цепи принимаем равными S. ![]()
Магнитное сопротивление цепи с магнитопроводом из электротехнической стали определяется следующим образом

Длины участков магнитной цепи с магнитопроводом (рис. 3)
l1m=0,0005 м; l2m=0,0195 м; l3m=0,06 м; l4m=0,0195 м; l5m=0,0005 м; l6m=0,06 м. Магнитная проницаемость вещества участков магнитной цепи [7] μr1m=1 (воздух); μr2m=7500 (электротехническая сталь); μr3m=7500 (электротехническая сталь); μr4m=7500 (электротехническая сталь); μr5m=1 (воздух); μr6m=3500 (среднеуглеродистая сталь 45). Площади поперечного сечения участков магнитной цепи принимаем равными S. ![]()
Ориентировочное усилие, развиваемое двигателем, обмотки которого имеют магнитопровод, можно найти из соотношения
При условии, что воздушный зазор 0,5 мм, при аналогичных размерах магнитопровода получим
Таким образом, трехфазный асинхронный двигатель с массивным ротором, имеющий аналогичные размеры, оснащенный магнитопроводом будет развивать усилие в пределах 7766—8736,5 Н. Среднее значение усилия P1=8251 Н при потребляемой мощности 6,35 кВт.
Для получения усилия подачи 200 кН данный привод должен будет иметь ориентировочную мощность с учетом магнитных и электрических потерь 154 кВт.
Потребляемая мощность может быть уменьшена: 1. Увеличением площади поперечного сечения и магнитной проницаемости магнитопровода; 2. Уменьшением магнитного сопротивления в воздушном зазоре; 3. Нанесением металлического слоя с высокой электрической проводимостью на поверхность массивного ротора; 4. Созданием пазов в теле массивного ротора.
При этом основной задачей создания электромагнитного привода подачи бурового органа является своевременное реагирование на изменение свойств горной породы. Электромагнитный привод будет реагировать на увеличение или уменьшение показателя буримости соответственным изменением величины тока в обмотке статора. Т. е. точка рабочего режима двигателя будет перемещаться по механической характеристике. Время такой адаптивной реакции будет характеризоваться периодом переходных электромагнитных процессов, что равняется десятым долям секунды [3]. Изменение тока в обмотке двигателя должно быть учтено при проектировании электрической машины.
Кроме того, данный механизм подачи рабочего органа позволяет легко автоматизировать процесс, в случае длительных перегрузок. Изменение тока будет фиксироваться напрямую с обмотки двигателя. В автоматическом режиме, согласно заложенной в контроллере функции режим бурения будет изменен. Соответственно должны быть изменены усилие и скорость подачи, а также момент на валу вращательного механизма и скорость вращения бурового става. Регулировка режимов возможна тремя способами: 1) при помощи преобразователя частоты; 2) понижением напряжения – для экстренного снижения величины ударных нагрузок; 3) комплексное использование обоих способов для получения оптимальных режимов.
Выводы:
1. Применение адаптивного механизма подачи на основе линейного трехфазного асинхронного двигателя с массивным ротором возможно на базе существующих буровых станков, запитанных от трехфазной электрической сети;
2. Линейный трехфазный асинхронный двигатель с массивным ротором способен обеспечить требуемое усилие подачи с приемлемым значением потребляемой мощности;
3. Адаптивный привод подачи способен своевременно реагировать на резкие изменения свойств горных пород перемещением точки рабочего режима по механической характеристике асинхронной машины, при соответственном изменении величины тока в обмотке двигателя;
4. Применение в качестве системы подачи линейного электромагнитного двигателя позволяет получать информацию об изменениях физико-механических свойств породы, измеряя величину тока в обмотке двигателя;
5. В случае длительных перегрузок в автоматическом режиме, согласно заложенной в контроллере функции режим бурения может быть изменен.
Список литературы:
1.Анурьев В.И. Справочник конструктора-машиностроителя: в 3-х т.: Т.2. – 8-е изд., перераб. и доп. Под ред. И.Н. Жестковой. – М.: Машиностроение, 2001, 2001. – 912 с.
2.Арцимович Г.В. Механофизические основы создания породоразрушающего инструмента. – Новосибирск: Наука, 1985. – 268 с.
3.Бессонов Л.А. Теоретические основы электротехники. изд. 9, перераб. и доп. – М.: Высш. шк., 1996. – 638 с.
4.Виноградов В.Н. и др. О критерии усталостной прочности зубьев шарошек / Долговечность газонефтепромыслового оборудования и инструмента. Труды МИНХиГП, вып. 81 – М.: – Недра, 1968. – С. 20—25.
5.Вольдек А.И. Электрические машины: Машины переменного тока / Вольдек А.И., Попов Д.А. – СПб.: Высш. шк.; Питер, 2007. – 350 с., ил.
6.Гольдштейн М.И. Специальные стали. Учебник для вузов. / Гольдштейн М.И., Грачев С.В., Векслер Ю.Г., М.: Металлургия, 1985. 408 с.
7.Китаев В.Е. Электротехника с основами промышленной электроники / Китаев В.Е., Шляпинтох Л.С. Учебник для проф.-техн. учебных заведений. Изд. 3-е, переработ, и доп. М., «Высшая школа», 1973 – 360 с.
8.Решетов Д.Н. Детали машин: Учебник для студентов машиностроительных и механических специальностей вузов. 4-е изд. – М.: Машиностроение, 1989. – 496 с.
9.Техника, технология и опыт бурения скважин на карьерах. Под ред. В.А. Перетолчина. – М.: Недра, 1993. – 286 с.
дипломов