Статья опубликована в рамках: VIII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 19 марта 2012 г.)
Наука: Технические науки
Секция: Машиностроение и машиноведение
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ТЕРМОГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Кузнецов Сергей Викторович
аспирант, УрГУПC, г. Екатеринбург
Е-mail: q555@yandex.ru
В настоящее время промышленность выпускает огромное количество разнообразных приводов вращательного движения, но в некоторых случаях требуется малогабаритный привод с высокой надежностью, удобным способом преобразования энергии и большим крутящим моментом при малых габаритах.
Всю совокупность этих требований может удовлетворить термогидропривод (ТГП) вращательного движения.
Выявить все достоинства и недостатки ТГП в полной мере возможно только в конкретных условиях эксплуатации.
К основным недостатками ТГП можно отнести:
- низкий КПД (не более 2 %);
- малую скорость (линейную или угловую);
- сложность изготовления профиля статора в модуле вращательного движения.
При сегодняшней точности изготовления деталей на станках с ЧПУ последний недостаток уже не является непреодолимым.
Главными достоинствами привода являются:
- возможность получения больших усилий и крутящих моментов на выходном звене [3, с. 30];
- способность работать при больших динамических нагрузках;
- отсутствие необходимости подачи жидкости извне;
- отсутствие насосов, фильтров, трубопроводов, то есть всех основных элементов, присущих обычной гидросистеме.
Простота ТГП как гидросистемы, заключающаяся в отсутствии насосов, трубопроводов, фильтров и т. п., не оставляет места для каких бы то ни было гидравлических сопротивлений, а, следовательно, и расчетов в привычном для гидропривода виде. Однако выходные характеристики ТГП во многом определяются такими свойствами рабочей жидкости, как плотность и вязкость.
На рисунке 1 показано принципиальное устройство простейшего силового модуля на основе ТГП. Он состоит из гидроцилиндра 1, полость 2 которого герметически закрыта и заполнена рабочей жидкостью. В полости расположении нагревательный элемент 3 [1, с. 14].
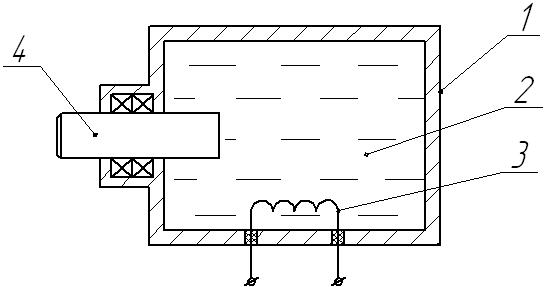
1 – корпус гидроцилиндра; 2 – полость;
3 – нагревательный элемент; 4 – плунжер
Рисунок 1 – Принципиальное устройство простейшего силового модуля
Устройство ТГП вращательного движения рассмотрим на примере конструкции демонстрационной модели (рисунок 2) [2]. ТГП содержит ротор 6, емкости 1 и 8, в которых находится рабочая жидкость, нагреватели 4 и 7, токосъемник 11, через который идет включение в коммутирующую систему. Емкости 1 и 8 соединены каналами с полостями цилиндров 13 и 12 соответственно. Плунжеры 5 и 2 контактируют с поверхностью расточки статора 10. Коммутирующая система представляет собой управляющий контроллер 14, силовой преобразователь 15, датчик угла поворота 16 и термодатчики 17, 18.
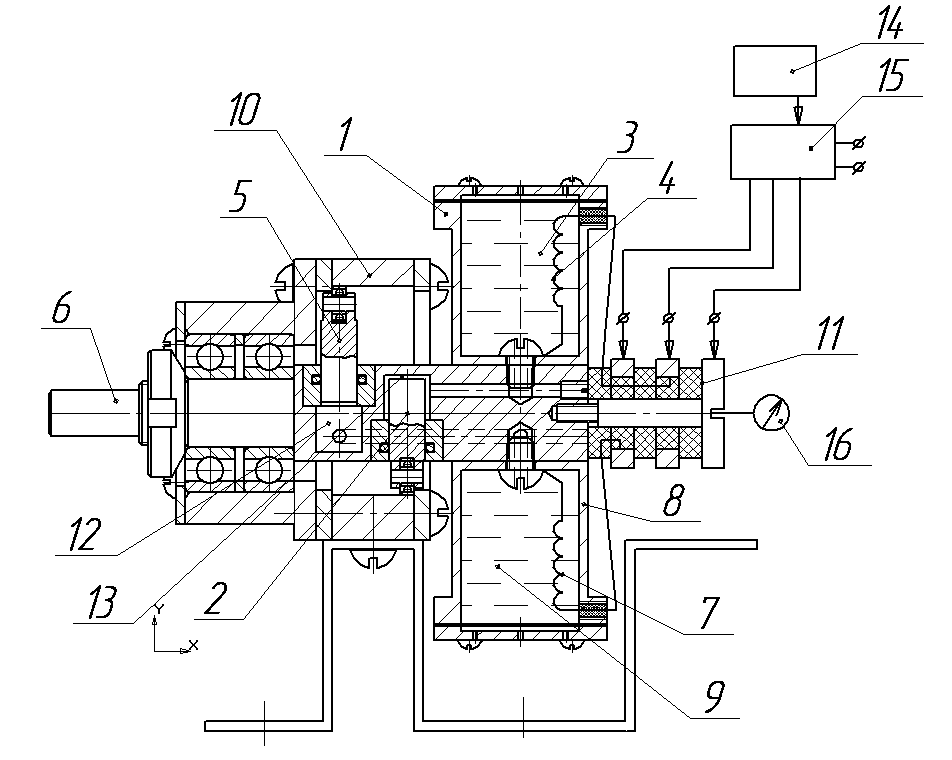 |
Рисунок 2 – Устройство ТГП вращательного движения
На рисунке 3 показаны силы, действующие при взаимодействии плунжера и статора.
.png)
Рисунок 3 – Силы действующие на плунжер
Геометрия профилированной поверхности статора такова, что одной из составляющих реакции Rсо стороны статора на поршень является осевая сила Rа. В результате силового взаимодействия плунжера и статора появляется окружная сила Fона поршне, создающая вращающий момент Т на роторе, содержащем блок цилиндров. Контакт плунжера со статором (рисунок 4)осуществляется с помощью подшипника качения, поэтому для простоты примем, что трение в паре плунжер – статор отсутствует.
Блок цилиндров (а вместе с ним и весь ротор гидродвигателя) поворачивается и занимает положение, в котором плунжер 2 выдвинут на максимальную величину.
По сигналу датчика 16 управляющий контроллер отдает команду силовому преобразователю на отключение нагревателя 4 и включение нагревателя 7. Жидкость в емкости 1 начинает охлаждаться, а в емкости 8 – нагреваться, плунжер 2 начинает углубляться, в то время как начинает выдвигаться плунжер 5 до соприкосновения со статором 10. Теперь сила Foдействует на плунжер 5, вращение ротора 6 продолжается. По достижении плунжером 5 определенного положения с датчика 16 поступает сигнал на управляющий контроллер 14 и цикл повторяется.
В начальный момент нагреватели 4 и 7 обесточены, температура в емкостях 1 и 8 равна температуре окружающей среды.
Включение привода осуществляется подачей напряжения от силового преобразователя 15 по сигналу управляющего контроллера 14 на нагреватель 4. Жидкость в емкости 1 нагревается, ее объем увеличивается, и часть жидкости поступает через канал в полость цилиндра 13. Плунжер 2 начинает выдвигаться и воздействовать на внутреннюю профилированную поверхность статора 10.
На рисунке 5 показана трехмерная модель статора.
Положение ротора и статора после начала работы ТГП показано на рисунке 6. Также из рисунка видно как взаимодействуют плунжеры ТГП с поверхностью статора.
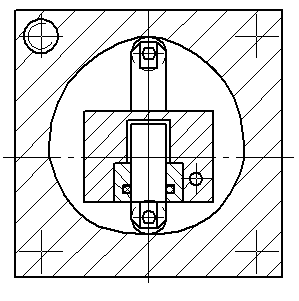
Рисунок 4 – Расположение плунжеров в статоре
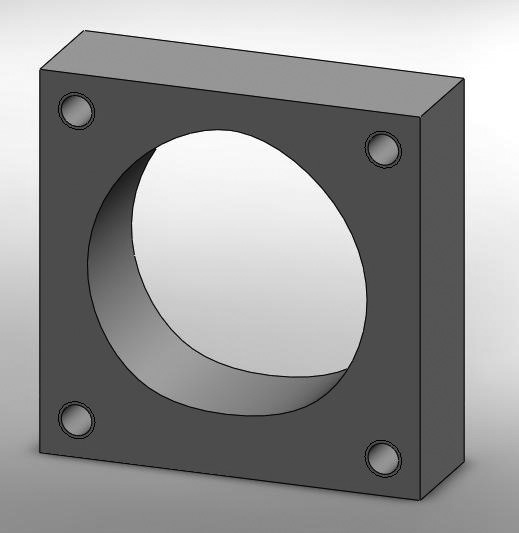
Рисунок 5 – Трехмерная модель статора
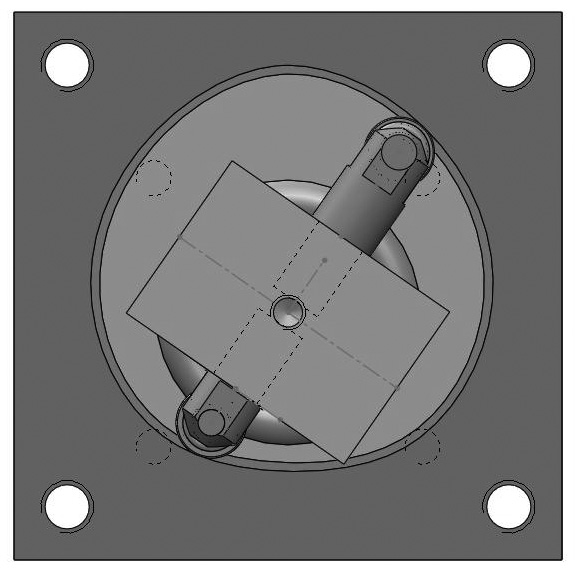
Рисунок 6 – Положение ротора относительно статора
Предложенный ТГП упрощает конструкцию привода путем исключения гидросистемы, а так же обеспечивает регулируемое непрямое преобразование электрической энергии в механическую.
Список литературы:
- Кузнецов С. В. Теоретические основы работы термогидропривода // Актуальные проблемы гуманитарных и естественных наук. 2011. № 7. С. 236.
- Роторно – поршневой гидродвигатель. Пат. 2424445 Рос. Федерация.
- Таугер В. М. Сравнительная оценка надежности механизмов регулирования шахтных осевых вентиляторов // Известия вузов. Горный журнал. 2011. № 3.
дипломов