Статья опубликована в рамках: VII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 21 февраля 2012 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции, Сборник статей конференции часть II
- Условия публикаций
- Все статьи конференции
дипломов

ПОВЫШЕНИЯ КАЧЕСТВА РОБОТОТЕХНИЧЕСКИХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ УПРАВЛЯЮЩЕГО МАГНИТОРЕОЛОГИЧЕСКОГО ЭЛЕМЕНТА
Комлева Оксана Анатольевна
ассистент каф. УИТ, БИТТИУ, г. Балаково
Е-mail: komlevaoa@yandex.ru
В последнее время развивающаяся промышленность требует автоматизированного процесса управления сборкой робототехнических систем.
Обеспечение точной сборки деталей требует внедрения управляющих элементов, которые обеспечат увеличение производительности сборки, а так же позволит сэкономить материалы и время на обработку. Для уменьшения брака в производстве необходимо использовать элементы управления. Одним из таких элементов может являться магнитожидкостный управляющий элемент, который может применяться в робототехнике.
Магнитореологические управляющие элементы основаны на использовании суспензий, таких как магнитореологическая жидкость (МЖ). МЖ отличается от других поверхностно-активных веществ определенными свойствами, например, она способна менять свою вязкость в зависимости от создаваемого магнитного поля.
Способов получения (МЖ) много, однако производство, например, магнитожидкостных управляющих элементов за границей начинает только осваиваться, а в России ещё не планируется.
Основной рабочей характеристикой магнитожидкостного управляющего элемента является зависимость силы сопротивления перемещению штока от скорости его перемещения. Реальная система практически не поддается точному решению, а потому выберем дифференциальные уравнения для статической и динамической характеристик МЖ управляющего элемента.
МЖ управляющее устройство применяется в робототехнике. А именно используется как управляющий элемент стабильной и точной работы робота. Разработанная конструкция МЖ управляющего элемента основана на использования магнитореологической жидкости, которая под воздействием магнитного поля изменяет свои вязкожесткостные свойства, что позволяет регулировать частотные характеристики управляющего элемента, представленного на рис. 1.Магнитореологический управляющий элемент выполнен из стали Ст3 и состоит из следующих элементов:- корпуса; - поршня; - двух крышек; - двух штоков.
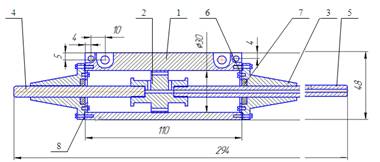
Рис. 1. Конструкция магнитореологического управляющего элемента
1 – корпус; 2 – поршень-катушка; 3 – крышка; 4 – шток; 5 – шток с отверстием под кабель-канал; 6 – планка; 7 – уплотнительное кольцо; 8 – прокладка.
Поршень выполнен из стали Ст3, имеет вид цилиндра с зазором по центру. Габаритные размеры изделия 40×30 мм. Зазор необходим для наматывания витков провода катушки, который подводится к месту наматывания по полому каналу, расположенному внутри поршня. В своем составе поршень имеет четыре пропускных канала для переливания жидкости из одной поршневой области в другую и две резьбы М8 для закрепления штоков. Принцип действия магнитореологического управляющего элемента основан на изменение плотности и вязкости магнитореологической жидкости внутри цилиндра, при изменения подачи напряжения на катушку. При изменения вязкости магнитореологичсекая жидкость становиться более плотной, тем самым уменьшается вибрация возникающая в процессе точечных операций.
Данная конструкция используется в роботе серии МП-11 и установлена на его руке [2].
Конструкция МЖ управляющего устройства используется как для перемещения, так и для захвата деталей. Управляющее устройство позволяет обеспечить точность операций робота и уменьшить вибрацию всей конструкции в целом. В настоящей статье произведен расчет [3] статической характеристик ЭМЖ управляющего устройства используемый в робототехники. На рис. 2 представлен робот модели МП-11.

Рис. 2. Робот модели МП-11
В работе [3] решены дифференциальные уравнения для статической характеристики МЖ управляющего элемента, в результате чего установлено:
· энергия магнитного поля определяется из графика, построенного в программной среде Elcut, предназначенной для моделирования магнитных полей, которая зависит от ряда параметров, основными из которых является сила тока катушки, напряженность магнитного поля, время;
· при увеличении магнитного поля, создаваемого магнитной катушкой, в МЖ управляющего элемента увеличивается вязкость МЖ, что позволяет снизить время реакции управляющего элемента на колебания;
· при увеличении вязкости МЖ в магнитожидкостном управляющим элементом увеличивается сила трения, прилагаемая на шток управляющего элемента.
Для расчета динамической характеристики МЖ управляющего элемента воспользуемся уравнением [3].
![]() (1)
(1)
и континуальной передаточной функцией [3].
 (2)
(2)
Найдем прямое преобразование Лапласа от стандартизирующей функции, учитывая, что прямое преобразование Лапласа от дельта функции равна 1:
![]()
![]()
Чтобы найти динамическую характеристику МЖ управляющего элемента, необходимо получить зависимость выходной величины от времени. Преобразуем выражение
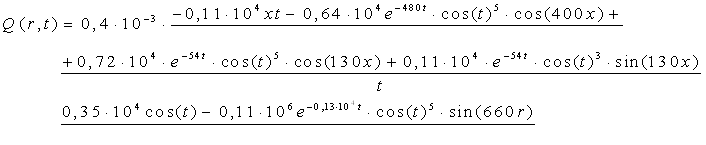 (3)
(3)
Подставим радиус цилиндра амортизатора r=0,015м в выражение (3), получим динамическую характеристику МЖ управляющего элемента
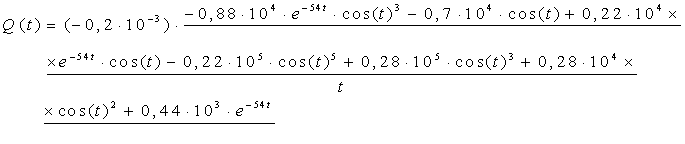 (4)
(4)
По уравнению (4) определили основные динамические свойства ЭМЖ управляющего элемента, построена ЛАЧХ и переходный процесс [2].
Разнообразные и уникальные свойства МЖ позволили создать на их основе новые высокоэффективные управляющие элементы. Которые могут использоваться не только в робототехники при гашения колебаний при перемещения деталей, а также использоваться как демпфирующее устройство-амортизаторы [1]. На основание теоретической динамической характеристики ЭМЖ управляющего устройства будут определены оценки качества автоматизированного технологического процесса сборке деталей в автомобилестроение.
Список литературы:
1. Власов А. В. Комлева О. А. Интеллектуальный магнитожидкостный амортизатор для автомобиля. IX Международная научная конференция «Современные проблемы электрофизики и электродинамики жидкостей», Санкт-Петербург 2009. - C. 102—105
2. Комлева О. А. Динамические характеристики электромагнитожидкостного управляющего элемента / О. А. Комлева // Вестник Саратовского государственного технического университета 2010, № 2(45), C. 116—120
3. Комлева О. А. Расчет теоретической статической характеристики магнитожидкостного амортизатора / Комлева О. А. // Системы автоматического проектирования и автоматизации производства: сб.науч.тр. - Саратов:СГТУ, 2009. – С. 232—237
дипломов