Статья опубликована в рамках: VII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 21 февраля 2012 г.)
Наука: Технические науки
Секция: Приборостроение, метрология, радиотехника
Скачать книгу(-и): Сборник статей конференции, Сборник статей конференции часть II
- Условия публикаций
- Все статьи конференции
дипломов

МАСШТАБНОЕ ФИЗИЧЕСКОЕ УЛЬТРАЗВУКОВОЕ МОДЕЛИРОВАНИЕ, ЕГО ПРОГРАММНАЯ И АППАРАТНАЯ СТОРОНА
Шкапский Глеб Игоревич
магистрант, БГТУ «Военмех», г. Санкт-Петербург
Курнина Дарья Валерьевна
магистрант, БГТУ «Военмех», г. Санкт-Петербург
Смолин Виктор Павлович
доцент, канд. техн. наук, БГТУ «Военмех», г. Санкт-Петербург
Данная статья посвящена применению масштабного физического УЗМ (ультразвукового моделирования) для экспериментального исследования ЭПР (эффективной площади рассеяния) моделей разнообразных объектов. Такое моделирование дает возможность производить многократные эксперименты работы проектируемой РЛ-системы в одинаковых условиях внешней обстановки. В настоящее время широко используются системы получения радиолокационных изображений (РЛИ) удаленных объектов для их распознания и идентификации.
Для повышения эффективности работ по проектированию РЛ-систем и решения указанных выше задач, широко используются различные методы моделирования: математическое, полунатурное, масштабное физическое (электродинамическое и ультразвуковое).
На начальных этапах проектирования системы применяется математическое и масштабное физическое моделирование.
Так как задачей рассматриваемого класса РЛ-систем является получение изображения объекта с высоким разрешением, модель внешней обстановки должна формировать параметры отраженных от объекта РЛ-сигналов в соответствии с его формой и отражающими свойствами. При моделировании необходимо использовать специальные цифровые базы данных, содержащие высокоточные трехмерные представления объектов, учитывать многократные переотражения сигналов между элементами объектов и т. п. Такие модели уникальны, требуют больших затрат времени и средств на свою разработку. При этом у пользователей модели нет полной уверенности в достаточной близости моделируемых сигналов к реальным. Поэтому более предпочтительным для моделирования внешней РЛ-обстановки может оказаться масштабное физическое ультразвуковое моделирование (УЗМ) в гидроакустическом бассейне с акустическими моделями реальных объектов. Так как в радиолокации и гидролокации используются одни и те же принципы и алгоритмы обработки эхосигналов, несмотря на различие природы акустических и электромагнитных волн, такое моделирование обладает по сравнению с математическим большей точностью и достоверностью. Различия получаемых при УЗМ гидролокационных и реальных РЛ-изображений объектов не имеют существенного значения, так как системы распознавания должны одинаково хорошо работать с изображениями, полученными как с помощью радиолокатора, так и гидролокатора [5].
УЗМ дает возможность многократно производить экспериментальные измерения при одних и тех же условиях внешней обстановки.
С помощью УЗМ могут исследоваться различные РЛ-системы и режимы, за исключением тех, в которых необходимо учитывать поляризационные свойства электромагнитных волн, так как акустические волны в воде имеют продольный характер колебаний, и поляризационные эффекты для них отсутствуют, в отличие от поперечных электромагнитных волн. В качестве приемопередающих антенн и элементов реальной радиолокационной обстановки (объектов, подстилающей поверхности и т. д.) при моделировании используются соответствующие им уменьшенные акустические модели – аналоги, выполненные в волновом масштабе (отношение длин ультразвуковой и электромагнитной волн) и размещенные в гидроакустическом бассейне.
УЗМ обладает большой эффективностью при разработке новых РЛ-систем и имеет ряд преимуществ по сравнению с другими способами исследования:
· небольшая стоимость и трудоемкость создания, эксплуатации оборудования и проведения экспериментов;
· большая достоверность и точность получаемых результатов, сравнимая с натуральными экспериментами.
Благодаря значительно меньшей скорости распространения моделирующих ультразвуковых волн в воде (Vм≈1500 м/c) по сравнению с реальными электромагнитными колебаниями в воздухе (Vр=3×108 м/c) удается имитировать сантиметровый диапазон электромагнитных волн, используя всего лишь мегагерцовый диапазон моделирующих несущих частот ультразвука, что упрощает применение современных цифровых технологий и делает возможным, например, преобразование эхосигналов с помощью аналого-цифровых преобразователей (АЦП) в цифровую форму непосредственно на несущей частоте.
Следует отметить, что для измерения случайных характеристик ЭПР и угловых флуктуаций эффективного центра отражения цели методом гидроакустического моделирования, необходимо поочередно в определенной точке бассейна располагать эталонный отражатель с известной ЭПР и модель протяженной цели, выполненную в определенном масштабе. Формировать выборки измеренных значений ЭПР числом не менее 2000, для неизменности его среднего значения![]() , и вводить их в ПК. А затем, осуществляя их статистическую обработку по программе, получать на дисплее, выводить из ПК на принтер или сохранять на носитель информации среднее значение ЭПР цели и эталонного отражателя, гистограмму распределения плотности вероятности и спектр колебаний величины ЭПР цели, или ее корреляционную функцию.
, и вводить их в ПК. А затем, осуществляя их статистическую обработку по программе, получать на дисплее, выводить из ПК на принтер или сохранять на носитель информации среднее значение ЭПР цели и эталонного отражателя, гистограмму распределения плотности вероятности и спектр колебаний величины ЭПР цели, или ее корреляционную функцию.
Измерение ЭПР целей с большим отношением характерного размера цели к длине волны является наиболее благоприятным случаем, так как ЭПР таких целей [4] слабо зависит от поляризации волны. А применять метод гидроакустического моделирования возможно лишь для экспериментального решения тех электродинамических задач, в которых поляризацией радиоволн можно пренебречь.
Однако при больших отношениях Lц/l появляются специфические трудности, основными из которых можно считать сильную изрезанность диаграммы вторичного излучения цели, большой динамический диапазон изменения ЭПР и трудности в обеспечении условия дальней зоны.
Известно, что само понятие ЭПР имеет смысл при некотором эталонном падающем поле. За эталонное поле обычно принимают поле плоской волны, т. е. падающая волна в месте расположения рассеивающего объекта должна быть плоской (монохроматической) [7]. Амплитуда отраженной волны должна измеряться либо на бесконечно большом удалении от рассеивающего объекта, либо условия дальней зоны обеспечиваются путем применения специальной акустической прожекторной системы.
Дистанционное зондирование объекта в гидроакустическом бассейне должно происходить в условиях, близких к радиолокационным натурным испытаниям. Рационально использовать одиночный излучатель точечного типа с широкой ДН на передачу, т. к. он будет уменьшать затраты, но из-за использования точечного излучателя будут возникать лишние переотражения от стенок бассейна. При выборе приемной антенны, актуальным вариантом является антенна с направленным излучением, имеющая узкую ДН, с высокой разрешающей способностью. Из всех антенн разного типа поставленному требованию удовлетворяет только АФАР. Причем, на базе именно цифровой антенной решетки (ЦАР) можно создать высокоинформативную приемную систему, способную воспринять всю информацию, содержащуюся в структуре пространственно-временных акустических полей в раскрыве решетки, и практически без потерь трансформировать ее в данные о наличии и параметрах объектов.
Приемный антенный модуль представляет собой плоскую эквидистантную решетку. На приеме решетка излучателей приемного модуля принимает отраженные сигналы, ограниченные ДН. Принятый сигнал является слабым, за один метр сигнал ослабляется на 9 Дб, для его усиления в каждом канале задействован малошумящий усилитель (рис. 1). Временная дискретизация и квантование осуществляется в АЦП. Для каждой дискретной выборки из возникающих колебаний в излучателях при падении на решетку гидроакустической волны производится оцифровка, каждая выборка представляется в виде двоичного числа. Решетка излучателей в отличие от непрерывного раскрыва по своему построению является дискретной системой, поэтому возбуждаемые в излучателях колебания являются дискретными выборками гидроакустической волны. Каждое колебание, попадая в АЦП своего канала, подвергается временной дискретизации и преобразуется в последовательность временных выборок. Таким образом, принимаемый сигнал можно представить в виде пространственно-временного поля выборок. Оцифрованные выборки одновременно, за один такт сохраняются в ПЛИС (программируемой логической интегральной схеме).
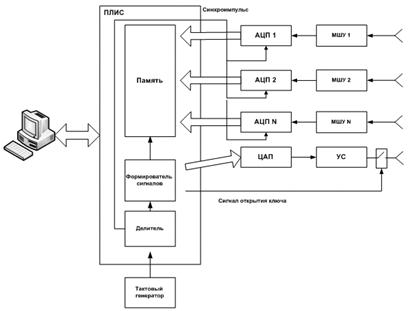
Рисунок 1. Структурная схема аппаратного комплекса
Кварцевый тактовый генератор вырабатывает импульсы, которые подаются на делитель, после делителя на формирователь сигналов и на АЦП, с формирователя сигнал поступает непосредственно в память ПЛИС, на цифровой ключ, для его открытия, и на канал передачи. Сначала сигнал проходит ЦАП, затем усиливается в малошумящем УС и подается на антенну, на одиночный излучатель точечного типа. После передачи сигнала антенной, цифровой ключ блокирует канал передачи, и отраженная волна падает только на приемную ЦАР, не затрагивая передающий тракт. Сигнал принимается излучателями ЦАР, затем усиливается в малошумящем усилителе, одновременно оцифровывается в АЦП и передаются в ПЛИС для записи в запоминающее устройство. После записи содержимое памяти передаётся на ПК для дальнейшей обработки.
Как правило, в теории [1, 2, 3, 6], а также на практике, принятый сигнал сразу пропускается через программируемые элементы задержки во всех приёмных трактах для формирования одной из ДН решётки. После оцифровки сигналы со всех приёмных каналов суммируются, и затем результат отображается или сохраняется. Далее генерируется ещё один сигнал, затем отраженный сигнал принимается излучателями и проходит уже через элементы задержки с другими временными параметрами. Для формирования полного изображения сигнал генерируется и принимается столько раз, сколько нужно сформировать ДН для различных направлений.
В настоящее время уже можно обойтись без элементов задержки. В данной статье мы предлагаем не использовать элементы задержки, а сохранять весь принятый оцифрованный сигнал сразу в память, сдвигать сигнал и формировать ДН непосредственно на ПК. Это требует гораздо большего объёма памяти, но в современных условиях это не является препятствием.
Итак, дальнейшее внимание будет сконцентрировано на создании программного комплекса для такого рода обработки принятых данных с ЦАР. Программа будет работать без аппаратного комплекса — на расчётный модуль для дальнейшей обработки будет подаваться сгенерированный в самой же программе тестовый сигнал. По полученным данным программы можно будет оценить, подходит ли этот метод формирования изображения. При положительном результате испытаний в дальнейшем можно легко подключить аппаратный комплекс для проведения полноценных испытаний в гидроакустическом бассейне.
Программа состоит из двух модулей. Первый модуль формирует для каждого излучателя отражённый от объекта тестовый сигнал и записывает его в память. Второй модуль обрабатывает сохранённый в памяти полученный сигнал, определяет направление прихода сигнала и строит гидролокационное изображение.
Рассмотрим первый модуль и процесс формирования сигнала. Введём несколько переменных, которые будут использоваться в расчёте.
![]() (1)
(1)
где f = 2,5 MГц — частота сигнала; T — период сигнала;
![]() (2)
(2)
где λ - длина волны сигнала;
![]() (3)
(3)
где d — расстояние между соседними излучателями;
Для оси X найдем основные параметры:
![]() (4)
(4)
где θxDeg — направление объекта в градусах; θx — направление объекта в радианах;
![]() (5)
(5)
где ddX — разница расстояний, преодолеваемых волной, для соседних излучателей;
![]() (6)
(6)
где dtX — разница времени прихода волны на соседние излучатели;
![]() (7)
(7)
где dφX — разница фаз сигнала на соседних излучателях;
Для оси Y найдем основные параметры:
![]() (8)
(8)
где θyDeg — направление объекта в градусах; θy — направление объекта в радианах;
![]() (9)
(9)
где ddY — разница расстояний, преодолеваемых волной, для соседних излучателей;
![]() (10)
(10)
где dtY — разница времени прихода волны на соседние излучатели;
![]() (11)
(11)
где dφY — разница фаз сигнала на соседних излучателях.
Примем фазу сигнала φNx,Ny на излучателе Nx, Ny равной нулю. Рассчитаем фазу на остальных излучателях относительно фазы φNx,Ny для сигнала, пришедшего с направления θx, θy.
![]() (12)
(12)
где x, y — номер излучателя; Nx — количество излучателей в направлении оси X; Ny — количество излучателей в направлении оси Y; x = 1…Nx; y = 1…Ny.
Cформируем сигнал для каждого излучателя.
![]() (13)
(13)
где A — амплитуда сигнала; fd — частота дискретизации; j — номер дискрета.
Рассмотрим второй модуль и процесс определения направления прихода сигнала. Введём несколько переменных, которые будут использоваться в расчёте.
![]() (14)
(14)
где Nk, Nl — количество формируемых ДН в плоскостях OYZ и OXZ; round – операция округления до целого числа.
Предположим, что на ЦАР поступает сигнал ![]() и помеха
и помеха ![]() . Тогда суммарный сигнал запишется в виде:
. Тогда суммарный сигнал запишется в виде:
![]() . (15)
. (15)
Сформируем все возможные ДН с помощью фазового сдвига и рассчитаем сигнал для каждого направления.
![]() (16)
(16)
Для каждого направления с помощью преобразования Фурье определим амплитуду сигнала на несущей частоте.
![]() (17)
(17)
Максимальное значение амплитуды Ak,l для k0,l0 соответствует направлению сигнала. Осталось вычислить углы, соответствующие направлению k0,l0.
![]() (18)
(18)
![]() (19)
(19)
В диалоговом окне программы задаются параметры сигнала и помехи, направление на объект, и характеристики ЦАР. На первой вкладке «Параметры сигнала, объекта, антенны» диалогового окна программы задаются параметры сигнала, направление на объект и характеристики ЦАР. На второй вкладке «Параметры помехи» задаются только параметры помехи. Для сигнала задается его частота, частота дискретизации и количество дискретов. Амплитуда сигнала фиксирована, равна единице, и задана в коде программы. ЦАР характеризуется количеством излучателей по обеим осям. Направление объекта в двух плоскостях OYZ и OXZ выставляется на шкале в пределах -90 до 90 градусов. В правой половине окна программы на графике отражена зависимость амплитуды сигнала от его направления. Направление прихода сигнала разложено по двум плоскостям, соответствующие углы расположены по горизонтальной и вертикальной осям. Амплитуда сигнала прямо пропорциональна интенсивности цвета точек, изображенных на этом графике. В левой стороне окна программы располагаются три графика. Верхний график показывает зависимость амплитуды от угла в плоскости OYZ для рассчитанного угла направления объекта в плоскости OXZ и зависимость амплитуды от угла в плоскости OXZ для рассчитанного угла направления объекта в плоскости OYZ. На нижних двух графиках уже приведена полярная система координат. Графики показывают зависимость амплитуды сигнала от угла в плоскостях OYZ и OXZ для ортогональных плоскостей, в которых присутствует максимальная амплитуда сигнала. Рассчитанные числовые значения углов направления объекта приводятся ниже всех графиков, и для удобства сравнивания также приведены его заданные углы. На второй вкладке программы выставляются параметры помехи, такие как её амплитуда, частота и направление в двух плоскостях OYZ и OXZ.
Если поставить галку «с помехой», то программа генерирует не только сигнал, но и помеху для дальнейшей их передачи в модуль распознавания объекта. Для распознавания сигнала прибегаем к преобразованию Фурье. Основное назначение преобразования Фурье — выделить частоты регулярных составляющих сигнала, зашумленного помехами. В нашем случае мы с помощью преобразования Фурье выделяем несущую частоту 2.5 МГц.
Если частота шума и сигнала совпадает, а заданные углы шума и сигнала разные, т. е. они приходят на излучатель с разных направлений, то мы видим на графики две точки: одна из них характеризует сигнал, другая помеху. Если частоты равны, то возникает неопределенность.
При различии частоты помехи и несущей частоты сигнала после преобразования Фурье и выделения несущей частоты помеха отсеивается.
Рассмотрим направление помехи, которая в одной из плоскостей почти совпадает с направлением сигнала, это усложняет распознавание сигнала на фоне помехи. При одинаковой амплитуде помехи и сигнала, но при отличии частоты сигнала от частоты помехи на 20 кГц (0.8 % при несущей частоте сигнала 2.5 МГц) помеха отсеивается после преобразования Фурье и выделения несущей частоты, а сигнал уже становится различимым. На рисунке 2 видно, что направление на объект верно рассчитано.
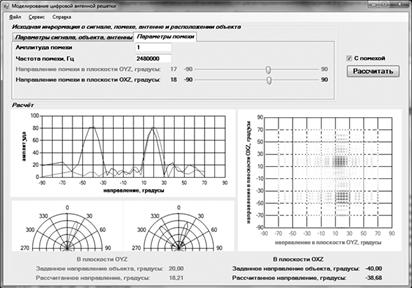
Рисунок 2. Результаты при различии частот сигнала и помехи на 20 кГц
Теперь рассмотрим случай при одинаковой частоте, но при разной амплитуде сигнала и помехи. Если амплитуда помехи составляет 90 % от амплитуды сигнала, то сигнал различим на фоне помехи. Программа определила направление на объект верно, это видно из сравнения заданного направления объекта и рассчитанного (рис. 3).

Рисунок 3. Амплитуда помехи составляет 90 % от амплитуды сигнала
Из теории о ЦАР, для получения узких ДН необходимо увеличивать длину антенны Nd. Но так как расстояние между излучателями должно быть меньше длины волны генератора (для получения одного главного максимума излучения), повышения направленности добиваются увеличением числа излучателей решётки N. Таким образом, можно проследить выполняется ли это характеристика в программе. Примем, что исходная решетка состоит из 9×9 излучателей, и затем увеличим матрицу до 25×25 и сравним полученные результаты от двух решеток, должно выполняться условие — чем больше излучателей в решетке, тем уже лепесток ДН. Результаты расчетов представлены на рисунках 4 и 5, на них видны существенные различия в ширине ДН. Это изменение ширины ДН полностью соответствует теории о ЦАР.
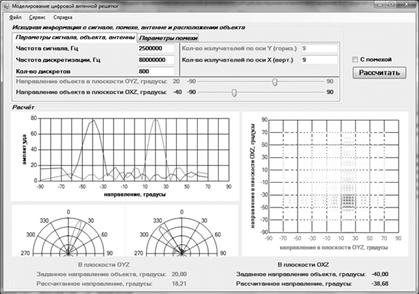
Рисунок 4. ДН решетки из 9×9 излучателей
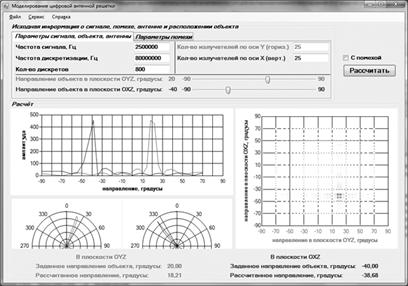
Рисунок 5 ДН решетки из 25×25 излучателей
Чтобы увеличить точность определения направления объекта можно увеличить частоту дискретизации fd. При этом увеличивается количество рассчитываемых ДН, что следует из (12) и (13). Увеличение количества рассчитываемых ДН пропорционально увеличению частоты дискретизации fd . Сравним рисунки 4 и 6, где все исходные параметры одинаковы, кроме значения частоты дискретизации. Видно, что при заданном угле -40 рассчитанный угол в плоскости OXZ при увеличенной частоте дискретизации до 200 МГц равен -40.54, а при частоте 80 МГц равен -38.68. Из этого следует, что точность определения направления объекта увеличивается вместе с увеличением частоты дискретизации.
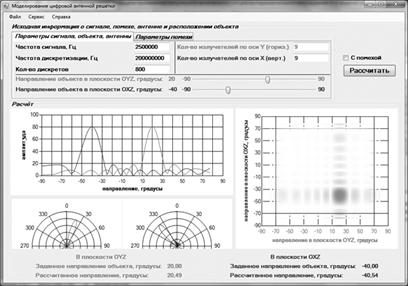
Рисунок 6 Увеличение частоты дискретизации до 200 МГц
Программа позволяет сохранить полученные результаты, также есть возможность просмотреть справку по работе с программой.
Выводы
1. В ходе исследования была разработана программа, позволяющая на фоне помехи обнаружить объект и определить направление на него.
2. Программа дает результаты, полностью сравнимые с результатами обработки сигналов, которая применима сегодня в аппаратных комплексах. Полученные результаты работы программы показывают, что она позволяет обнаружить объект и его изобразить.
3. Запись сигнала происходит гораздо быстрее, а значит за это короткое время погрешность, возникающая, если объект колеблется или перемещается, почти не накапливается.
4. Алгоритм разработанной программы по нахождению и формированию изображения объекта может быть применим в гидроакустических комплексах с аппаратной обработкой.
Список литературы:
1. Гениатулин К. А., Носов В. И. Планирование систем спутниковой связи с зональным обслуживанием // Вестник СибГУТИ, — 2009, — № 4, — C. 11—22.
2. Григорьев Л. Н. Цифровое формирование диаграммы направленности в фазированных антенных решетках. — М.: Радиотехника, 2010, — 144 с.
3. Кочетков В. Ю. Структура канальных трактов цифровых антенных решеток// Известия вузов. ЭЛЕКТРОНИКА, № 5(79), 2009, С. 66—69.
4. Майзельс Е. Н., Торганов В. А. Измерение характеристик рассеяния радиолокационных целей. — М.: Советское радио, 1972, — 232 с.
5. Семин А. И., Трофимов В. Н. Масштабное физическое гидроакустическое моделирование радиолокационных систем получения и обработки радиолокационных изображений высокого разрешения // Известия Российской академии наук. Теория и системы управления, № 3, 2005, С. 147—157.
6. Смарышев М. Д. Направленность гидроакустических антенн. — Л.: Судостроение, 1973, — 279 с.
7. Штагер Е. А. Рассеяние радиоволн на телах сложной формы. — М.: Радио и связь, 1986. — 184 с.
дипломов