Статья опубликована в рамках: LX Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 25 июля 2016 г.)
Наука: Технические науки
Секция: Электроника
Скачать книгу(-и): Сборник статей конференции
дипломов
ОПТИЧЕСКИ СВЯЗАННЫЕ КОЛЬЦЕВЫЕ СЕТИ ИЗ НЕЙРОНОВ Nvc, ВВЕДЕНИЕ ПОНЯТИЙ АКСОННЫЕ И ДЕНДРИТНЫЕ ИНТЕРФЕЙСЫ ПЕРВОГО УРОВНЯ

THE OPTICALLY COUPLED TO THE NEURONS Nvc, INTRODUCING THE CONCEPT OF AXONS AND DENDRITS INTERFACE FIRST LEVEL
Ernesto Zholondiyevsky
graduate student, PEE HPE “Tolyatti management academy”,
Russia, Tolyatti
АННОТАЦИЯ
В данной статье рассматривается непосредственное управление оптически связанными кольцевыми сетями из нейронов Nvc, реализация на их основе стимульно-реактивных BEAM роботов, предполагается дальнейшее использование стимульно-реактивных устройств в качестве симбиотических роботов. Вводится понятия аксонных и дендритных интерфейсов первого уровня.
ABSTRACT
This article discusses the direct control of optically coupled ring networks of neurons Nvc, implementation on the basis of their stimulus – jet BEAM robots, is expected to further the use of stimulus-jet devices as a symbiotic robots. Introduces the concept of axonal and dendrites’ interfaces of the first level.
Ключевые слова: Nvc нейроны; нейронные кольцевые цепи; BEAM робот; стимульно-реактивные устройства; симбиотический робот; аксонный и дендритный интерфейсы первого уровня.
Keywords: NvC neurons; neural ring circuits; BEAM robot; stimulno-reactive devices; symbiotic robot; axonal and dendrites interface of the first level.
Ранее в статьях «Поведенчески ориентированные схемы BEAM роботов, введение понятий Nv и Nu нейронов в зависимости от типа входных цепей» и «Схемы петлевых сетей из Nvc , NvL нейронов, введение понятий ведущая и ведомая двуядерная схема» мы уже рассматривали схемы, построенные на основе нейронных цепей, характеристики нейронов в зависимости от использования типа входных цепей. В данной статье мы будем рассматривать виды интерфейсов от типа входных и выходных цепей нейронов. По аналогии с биологическим нейроном введем понятия дендритные цепи – для всех видов входных цепей и аксонные цепи – для всех выходных цепей Рисунок 1 а) для NvC нейрона и б) для NuR нейрона.
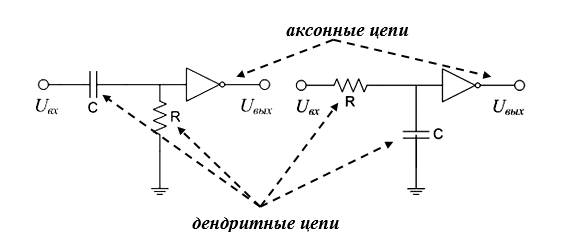
Рисунок 1. а) NvC нейрон б) NuR нейрон
Мы уже рассматривали ведущие и ведомые петлевые нейронные сети и косвенное управляющее воздействие, далее мы будем рассматривать непосредственное управляющее воздействие.
Рассмотрим простую двуядерную схему из двух нейронов NvС соединенных в кольцевую сеть. Разрываем сеть в месте соединения аксонной цепи второго нейрона NvС и дендритной цепи первого нейрона NvС, и далее подсоединяем к аксонной цепи инфракрасный передатчик, а к дендритной цепи инфракрасный приемник. Таким образом, мы получаем аксонный и дендритные интерфейсы первого уровня, показанные на Рисунке 2, или Оптически Связанную кольцевую двуядерную нейронную Сеть NvС (ОСС). В последующем мы рассмотрим и другие типы интерфейсов, но для принципиального понимания процессов непосредственного управления кольцевой нейронной сетью мы на данном этапе ограничимся рассмотрением Оптически Связанной Сетью (ОСС).
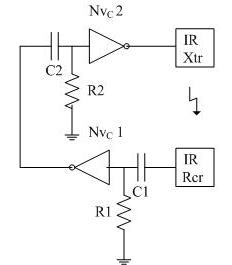
Рисунок 2. Кольцевая Оптически Связанная Сеть (ОСС) из двух нейронов NvС
На Рисунке 2 показана простейшая (каноническая) кольцевая Оптически Связанная Сеть (ОСС) из двух нейронов NvС. Данную схему можно использовать в качестве простого детектора обнаружения. Пока оптический связь «свободна», двуядерная сеть будет работать в обычном режиме. Как только что-то попадает в поле оптической связи, двуядерная схема прекращает работать. В данной конфигурации есть одно преимущество, она обладает способностью к обнаружению объекта, и это происходит с помощью передатчика и приемника. Преимущество использования двуядерной сети из нейронов NvС состоит в том, что типовое инфракрасное излучение (IR) слаботочное и не требует при использовании в данной сети дополнительного усиления, что ведет к потере быстродействия. При помощи двуядерной сети из нейронов NvС работающей на довольно высокой скорости, оптическую пару можно включить на краткое время, но большую часть времени сама сеть будет не рабочей.
Исходная классическая схема, ОСС проста, и поэтому существуют две очевидных проблемы. Во-первых, если сработает оптическая пара, то двуядерная сети из нейронов NvС, как только нормализуется инфракрасный световой поток, не запустится снова автоматически. Во-вторых, при работе двуядерной сети из нейронов NvС нет четкой индикации, того что цикл прохождения импульсов завершен, независимо от того в какой точке схемы мы фиксируем импульсы, мы будем получать импульсы в виде не маркированных сигналов. В любом случае необходимы дополнительные схемы, для решения этих проблем.
И последнее проблема, которая существует, это сам передатчик IR и приемник сложность используемой конструкции, ее габариты, простота.
Однако рассмотрим ряд возможностей использования ОСС из двух нейронов NvС. На Рисунке 3 мы меняем направление приемника и передатчика IR. Таким образом, мы получаем простейший IR дальномер.

Рисунок 3. Кольцевая Оптически Связанная Сеть (ОСС) из двух нейронов NvС – схема реализации IR дальномера
Инфракрасный свет отражается практически от всех материалов, таким образом, эта новая конфигурация может использоваться в качестве датчика расстояния, реализованного на приемнике и передатчике IR. В зависимости от коэффициента усиления, эмиттерной интенсивности и расположения датчиков IR на корпусе самого робота или исполнительного механизма, поверхности могут быть обнаружены на расстояния от 25 мм до 100 мм. Блестящие и металлические поверхности могут быть обнаружены на еще больших расстояниях.
Кроме того, инфракрасный свет может, рассеивается, из-за неровностей на многих поверхностях. Но этого достаточно, для того чтобы схема смогла бы обнаруживать поверхности, которые находятся под углом к световому потоку. Этот же эффект можно использовать, для установления точного расстояния до объекта. Если приемник и передатчик сфокусировать на одной точке под определенным откалиброванным углом и на известном расстоянии, то такое расположение поможет точно определить расстояние до обнаруженной поверхности (данная функция была реализована в черепашках Грея Уолтера (William Grey Walter)).
И наконец, можно получить еще больше возможностей при, использовании двух идентичных ОСС из нейронов NvС. Если разместить эти две схемы непосредственно друг напротив друга, эффект состоит в том, чтобы создать оптически связанное двойное микроядро. На Рисунке 4 показана реализация такой схемы.
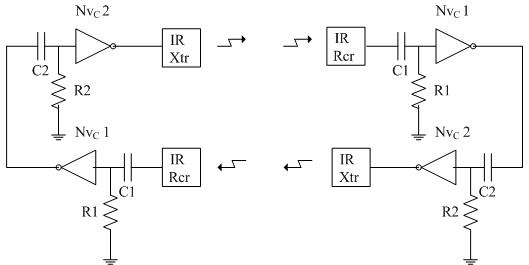
Рисунок 4. ОСС из двух двуядерных сетей из нейронов NvС – оптически связанное двойное микроядро
Такая «комбинация» может использоваться, как угодно. Можно использовать для обнаружения друг друга двумя роботами или некоторого «общения», то есть обмена информацией. Или в качестве постоянно работающего маяка, который подает сигналы, тем самым сообщая о своем местоположении одному или нескольким роботам. Можно использовать для передачи информации, посылая различные импульсы с оптического передатчика и считывая их в приемнике.
Основной элемент в ОСС из двух нейронов NvС – инфракрасный передатчик. Все что для этого требуется транзистор, включенный по схеме с общим эмитерром, для того что бы добиться наиболее яркого и равномерного свечения инфракрасного светодиода. Это необходимо, из – за того что для функционирования IR светодиода в рабочем режиме необходимо чуть больше мощности чем дают инверторы, используемые для построения двуядерной нейронной сети. Для эффективного управления инфракрасным светодиодом, можно использовать транзистор PNP.
Модуль передатчика довольно прост и показан на Рисунке 5.
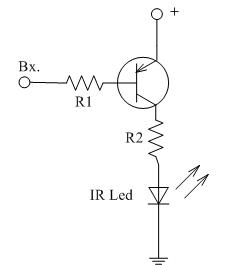
Рисунок 5. Модуль IR передатчика ОСС из двух нейронов NvС
Выход от основной нейронной схемы ОСС соединен с базой транзистора через резистор R1. Когда напряжение на выходе ОСС низкое, электрический ток через транзисторный переход эмиттер – база и через R1 маленький. Это позволяет большему току течь через коллектор транзистора и инфракрасный светодиод.
Значение резистора R2 определяет, какой ток будет течь через инфракрасный светодиод. Из всех резисторов в схеме данный резистор выполняет наиболее важную функцию. Стоит обратить внимание на мощность при использовании малых значений для резистора R2.
При практическом применении IR светодиодов возникает небольшая проблема, она заключается в том, что инфракрасное излучение ниже видимого спектра света. Очень сложно убедится в том, что передатчик функционирует в нужном режиме, прежде чем перейти к тестированию других частей схемы. Но, тем не менее, существует несколько простых способов для того что бы убедится в работоспособности светодиода IR. Можно замерить ток, проходящий через светодиод или замерить падение напряжения на светодиоде. Замер постоянного тока гарантированный способ для того что бы убедится, что на светодиод подается нужная сила тока; это подтвердит так же правильность подбора номинала резистора. Существенный недостаток разрыв цепи и громоздкость измерительных приборов.
Измерение напряжения менее проблематично, поместив измерительные зажимы по обе стороны светодиода IR, при этом обязательно удостоверившись, что полярность соблюдена. Если светодиод правильно подключен и работает, то можно увидеть, что напряжение составляет в 1,4 вольта (или меньше, если ток довольно низкий). Если светодиод не работает, то напряжение будет очень близко к Vпит. И если светодиод закорочен, то напряжение будет ноль.
При использовании слишком больших значений выходного тока передатчика, высока вероятность, что каждый выходной импульс вызовет скачёк напряжения питания, которое будет влиять на нейроны NvС. Это может привести к ложным срабатыванием в ОСС из двух нейронов NvС.
Но этого можно избежать, подключив конденсатор большой емкости, между полюсами питания как показано на Рисунке 6.
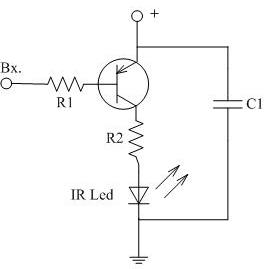
Рисунок 6. Шунтирующий конденсатор
Эффекты скачков напряжения можно также уменьшить, за счет раздельного питания IR передатчика и приемника. Но все эти решения не требуются при низких токах.
Конструкция IR приемника так же важна, как и конструкция передатчика в схеме ОСС. Однако существуют две проблемы, которые необходимо решать с конструкцией схемы. Приемник должен отличать инфракрасный луч от передатчика и фоновое инфракрасное излучение, далее усилить принятый сигнал, таким образом, чтобы полученный результат можно было использовать со стандартной двуядерной схемой. На Рисунке 7 показана схема IR приемника для ОСС из двух нейронов NvС.
Рисунок 7. Схема IR приемника для ОСС из двух нейронов NvС
Один из основных элементов в схеме приемника – операционный усилитель (ОУ). Реализация схемы может быть сконфигурировано разными способами, с использованием резисторных цепочек. В нашем случае один ОУ будет использоваться в качестве усилителя сигнала, а второй как компаратор.
Фотодиод IR D1 выдает маленькое напряжение в ответ на инфракрасное излучение, меньше чем полвольта. В комнате, освещенной лампами накаливания, фоновое излучение IR может составить 1/4 вольта или больше, таким образом, сигнал должен быть обработан так, чтобы отличить инфракрасный луч передатчика от фонового излучения.
Второй элемент в приемнике – R1C1 цепочка, используемая, для фильтрации фонового инфракрасного излучения. У этой части схемы есть некоторое сходство с классическим нейроном NvC, но фактически имеет отличие. Через конденсатор C1 происходит фильтрация сигнала, когда фотодиод обнаруживает инфракрасный луч. Сигнал, проходящий через фильтр, являясь входным сигналом, отфильтрованным от фонового излучения. Резистор R1 сохраняет на выходе фильтра напряжение близкое к 0 вольтам, если только нет внезапного повышения напряжения от фотодиода. Это препятствует передаче через фильтр сигнала, вызванного, изменением в фоновом инфракрасном излучении.
Диод D2 препятствует тому, чтобы выходное напряжение фильтра «подсаживалось» общей шиной, когда проходит входной сигнал. Диод D2 нужен только в том случае, если используется операционный усилитель, у которого нет встроенных диодов защиты.
Первый операционный усилитель используется как усилитель напряжения. Он усиливает выходное напряжение фильтра на порядок, повышая его от полувольта к нескольким вольтам.
Второй операционный усилитель сравнивает усиленное напряжение с опорным напряжением, которое установлено потенциометром R4. Если входное напряжение выше, чем опорное напряжение, напряжение на выходе второго операционного усилителя повышается до его максимального уровня (обычно 70 % Vпит). Если входное напряжение, ниже опорного напряжения, второй операционный усилитель подает низкое выходное напряжение.
И наконец, стандартный инвертор Шмидта используется, для четкого срабатывания. Это – выход приемника. Когда схема приемника обнаруживает на входе луч IR, на выход приемника низкий уровень сигнала, и когда нет никакого луча IR на входе, на выходе приемника высокий уровень сигнала. Это те типы сигналов и условия, которые необходимы, для управления нейроном NvC в двуядерной схеме.
Таким образом в данной статье мы рассмотрели дендритный и аксонный интерфейсы, датчики первого уровня и реализация на их основе Оптически Связанной Сети из двух нейронов NvС, что дает возможность реализации на основе ОСС роботов с возможностью обмена информацией, обнаружения препятствий, IR дальномера, детектора движения, функции «свой-чужой» и т. д.
Список литературы:
- Жолондиевский Э.Р. Поведенчески ориентированные схемы BEAM роботов, введение понятий Nv и Nu нейронов в зависимости от типа входных цепей. // Технические науки от теории к практике – по материалам LVI Международной научно практической конференции: научное издание / Э.Р. Жолондиевский – СибАК: сб. статей № 3 Новосибирск, 2016. – С. 130–142.
- Кацман М.М. Электрические машины и электропривод автоматических устройств: учеб. для техникумов / М.М. Кацман. – М.: Высшая школа, 1987. – 335 с.
- Кенио Т. Двигатели постоянного тока с постоянными магнитами: научное издание / Т. Кенио; Пер. с англ. А.Ю. Черкашина. – М.: Энергоатомиздат, 1989. – 184 с.
- Brooks R.A. A robust layered control system for a mobile robot. – [Электронный ресурс] – Режим доступа. – URL: http://beam-robot.ru (Дата обращения: 17.06.16).
- Brooks R.A. Intelligence without Reason. – [Электронный ресурс] – Режим доступа. – URL: http://beam-robot.ru (Дата обращения: 14.05.16).
- Tilden M.W. Living Machines. – [Электронный ресурс] – Режим доступа. – URL: http://beam-robot.ru (Дата обращения: 21.04.16).
- Tilden M.W. The Design of «Living» Biomech Machines: How low can one go? – [Электронный ресурс] – Режим доступа. – URL: http://beam-robot.ru (Дата обращения: 18.04.16).
дипломов