Статья опубликована в рамках: LIV Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 25 января 2016 г.)
Наука: Технические науки
Секция: Аэрокосмическая техника и технологии
Скачать книгу(-и): Сборник статей конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ВОЗМОЖНОСТИ ПРОГРАММНОЙ СРЕДЫ MATLAB ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
Дьяченко Максим Евгеньевич
аспирант Морского Государственного Университета имени адмирала Г.И. Невельского,
РФ, г. Владивосток
E-mail: dyachenkomax92@gmail.com
Белоус Денис Вениаминович
аспирант Морского Государственного Университета имени адмирала Г.И. Невельского,
РФ, г. Владивосток
E-mail: shade_199@7x.ru
CAPABILITIES OF SOFTWARE THE MATLAB ENVIRONMENT FOR MODELING ELECTROMECHANICAL SYSTEMS
Maxim D’yachenko
рostgraduate, Admiral G.I. Nevelskoy Maritime State University,
Russia, Vladivostok
Denis Belous
postgraduate, Admiral G.I. Nevelskoy Maritime State University,
Russia, Vladivostok
АННОТАЦИЯ
Рассмотрены возможности программной среды Matlab для моделирования электромеханических систем управления. Рассмотрены основные блоки библиотеки SimPowerSystems, в частности, источник питания, двигатель постоянного тока и силовые переключающие элементы.
ABSTRACT
The capabilities of software the Matlab environment for modeling electromechanical control systems. The basic blocks SimPowerSystems library, in particular, a power supply, a DC motor and power switching elements
Ключевые слова: электромеханические системы; моделирование; Matlab; SimPowerSystems.
Keywords: electromechanical systems; modeling; Matlab; SimPowerSystems.
Введение.
В настоящее время возрос интерес к моделированию электромеханических систем управления. Особенно актуальным считается моделирование электроприводов роботов и их систем управления, в частности модели с упругостью звеньев или адаптивные системы. Но, как правило, при моделировании подобных систем используют упрощенные, линейные модели [2; 4]. Целесообразность создания более сложных программных моделей обусловлена тем фактом, что изготовление реального лабораторного стенда для исследования электромеханических систем является весьма затратным. Активно применяемая в настоящее время среда моделирования Matlab создает широкие возможности моделирования систем управления электромеханическими системами на базе двигателей постоянного тока независимого возбуждения и исследования их характеристик.
Библиотека блоков SimPowerSystems.
Библиотека блоков SimPowerSystems является одной из библиотек Matlab, и содержит набор блоков для моделирования электротехнических устройств. В состав библиотеки входят модели разнообразных электротехнических элементов, таких как источники электроэнергии, блоки управления электрическими двигателями постоянного и переменного тока, трансформаторы, линии передачи электроэнергии, а также элементы силовой электроники. Используя возможности Simulink совместно с SimPowerSystems, можно выполнять аналитическое исследование таких устройств [1; 3].
Библиотека SimPowerSystems включает в себя следующие разделы:
- Electrical Sources – источники питания;
- Measurements – измерительные устройства;
- Elements – электротехнические элементы;
- Power Electronics – устройства силовой электроники;
- Machines – электрические машины.
Сравнивая технологию создания модели в SimPowerSystems (SPS) с аналогичной, на основе библиотеки Simulink, можно отметить их сходство. Так же, как и для обычной Simulink-модели, используемые блоки располагаются на схеме, задаются их параметры, происходит их соединение, и устанавливаются параметры модели в целом. Однако, существует и различие. Это связано с тем, что, входы и выходы SPS-блоков являются эквивалентами электрических контактов, а соединительные линии между блоками являются электрическими проводами.
S-блоки и SPS-блоки не могут быть непосредственно связаны друг с другом. Для их объединения используют управляемые источники тока/напряжения и измерители тока/напряжения.
Необходимо отметить, что справочная система Matlab содержит достаточно много примеров моделей, в частности power_Hbridge.mdl, который может быть адаптирован для моделирования систем с переменной структурой [2].
Рассмотрим некоторые элементы SimPowerSystems библиотеки.
Обзор основных элементов библиотеки SimPowerSystems.
DC Voltage Source – источник постоянного напряжения (рис. 1). Предназначен для выработки постоянного по уровню напряжения. Блок является идеальным источником напряжения, т. е. его собственное сопротивление равно нулю.

Рисунок 1. Источник постоянного напряжения
DC Machine – Машина постоянного тока. Моделирует электрическую машину постоянного тока. На рис. 2 и 3 приведены обозначения блока DC Machine и его параметры.
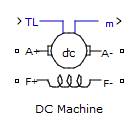
Рисунок 2. Обозначение электрической машины постоянного тока

Рисунок 3. Параметры блока DC Machine
Порты блока A+ и A – являются выводами обмотки якорной цепи, а порты F+ и F – представляют собой выводы обмотки возбуждения. Порт TL предназначен для подачи момента сопротивления движению. На выходном порту m формируется векторный сигнал, состоящий из пяти элементов: скорости, токов якорной цепи и цепи возбуждения, электромагнитного момента и ускорения.
Параметры блока:
- Armature resistance and inductance [Ra (ohms) La (H)]: Активное сопротивление Ra (Ом) и индуктивность La (Гн) цепи якоря;
- Field resistance and inductance [Rf (ohms) Lf (H)]: Активное сопротивление Rf (Ом) и индуктивность Lf (Гн) цепи возбуждения;
- Field-armature mutual inductance Laf (H): Взаимная индуктивность между цепью якоря и цепью возбуждения двигателя (Гн);
- Total inertia J (kg.m^2): Момент инерции двигателя J (кг*м^2);
- Viscous friction coefficient Bm (N.m.s): Коэффициент вязкого трения Bm (Н*м*с);
- Coulomb friction torque Tf (N.m): Реактивный момент сопротивления Tf (Н*м);
- Initial speed (rad/s): Начальная угловая скорость вала двигателя (рад/с).
Схема модели машины постоянного тока представлена на рисунках 4 и 5.

Рисунок 4. Схема модели машины постоянного тока
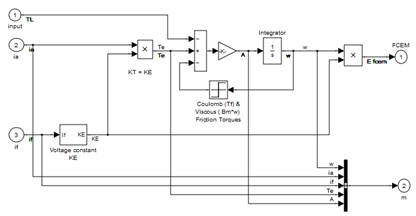
Рисунок 5. Схема модели машины постоянного тока
Якорная цепь двигателя представлена ее активным сопротивлением Ra, индуктивностью La и ЭДС обмотки якоря E_FCEM (управляемый источник напряжения). Величина ЭДС обмотки якоря вычисляется по выражению
 ,
,
где: ω – скорость двигателя, а KE – коэффициент пропорциональности:

где: Laf — взаимоиндуктивность обмотки якоря и обмотки возбуждения двигателя, а If — ток обмотки возбуждения.
Цепь возбуждения машины представлена на схеме активным сопротивлением Rf и индуктивностью Lf обмотки возбуждения.
Величина электромагнитного момента вычисляется в соответствии с выражением:

где: Ia – ток якоря, а KT – коэффициент пропорциональности между электромагнитным моментом и током якоря. В приведенной модели принято следующее соотношение:  .
.
Механическая часть модели вычисляет скорость двигателя в соответствии с уравнением:

где: J – момент инерции, Bm – коэффициент вязкого трения, Tf – коэффициент сухого трения.
Для управления силовой частью электромеханической системы в ключевом режиме используются силовые переключающие элементы (рис. 6). К ним относятся управляемые транзисторы (IGBT – Биполярный IGBT транзистор, Mosfet – Mosfet транзистор) и диоды(Diode – Силовой диод).

Рисунок 6. Силовые переключающие элементы
Рассмотренные элементы в комбинации с управляющей логикой могут быть использованы для моделирования электромеханических систем, в частности систем с переменной структурой.
Заключение.
В статье рассмотрены возможности подсистемы SimPowerSystems для моделирования электромеханических систем. Описаны возможности данной библиотеки и методика построения схем моделирования. Рассмотрены основные блоки, в частности, источник питания, двигатель постоянного тока и силовые переключающие элементы.
Список литературы:
1.Авторские руководства по продуктам MathWorks URL:http://matlab.exponenta.ru (Дата обращения: 15.12.2015).
2.Дыда А.А., Оськин Д.А. Адаптивное субоптимальное управление приводом манипуляционного робота // Современные наукоемкие технологии. № 12 (2) 2015, С. 230–233; URL: http://www.top-technologies.ru/ru/article/view?id=35243 (дата обращения: 11.01.2016).
3.Дьяконов В., Круглов В. MATLAB. Анализ, идентификация и моделирование систем. Специальный справочник. – СПб.: Питер, 2002. – 448 с.: ил.
4.Оськин Д.А., Дыда А.А. Нейросетевое прогнозирующее управление приводом робота на базе двухмассовой модели с упругостью // Фундаментальные исследования. № 11 (часть 5) 2015, С. 909–913; URL: http://www.fundamental-research.ru/ru/article/view?id=39531 (Дата обращения: 11.01.2016).
дипломов