Статья опубликована в рамках: LII Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 18 ноября 2015 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ АКТИВНОГО ПОДАВЛЕНИЯ СЛУЧАЙНОГО НИЗКОЧАСТОТНОГО ШУМА
Ушенина Инна Владимировна
канд. техн. наук,
ПензГТУ,
РФ, г. Пенза
E-mail:
MATHEMATICAL MODEL OF AN ACTIVE NOISE CONTROL SYSTEM WORKING WITH BANDLIMITED RANDOM NOISE
Inna Ushenina
candidate of science,
PenzSTU,
Russia, Penza
Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта №14-07-31091 мол_а
АННОТАЦИЯ
В работе рассматривается математическая модель системы активного подавления акустического шума, разработанная в MATLAB. Модель предназначена для выявления характера зависимости уровня подавления случайного низкочастотного шума от порядка адаптивного фильтра системы.
ABSTRACT
This paper considers a MATLAB model of an active noise control system. This model is intended to recognize a dependence character of noise suppression level on the order of the system’s adaptive filter.
Ключевые слова: активное подавление шума; математическая модель; адаптивный фильтр.
Keywords: active noise control; mathematical model; adaptive filter.
Принцип действия большинства систем активного подавления акустического шума (АПШ) состоит в формировании противофазного компенсирующего сигнала на основе анализа опорного сигнала и сигнала ошибки, являющегося разностью шума и компенсирующего сигнала в контрольной точке (рисунок 1). Эту задачу, как правило, выполняет адаптивный фильтр (АФ) с алгоритмом наименьших средних квадратов и предварительной фильтрацией опорного сигнала [2; 4; 5].
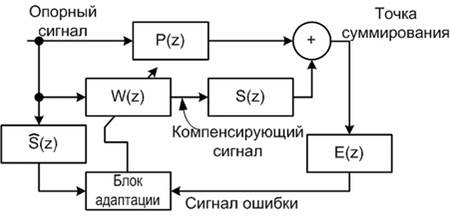
Рисунок 1. Структура системы АПШ с опорным сигналом
На рисунке 1 P(z) – передаточная функция акустического пути распространения шума от опорного микрофона до точки суммирования; W(z) – передаточная функция АФ; S(z) – передаточная функция пути компенсации, включающего динамик – от выхода АФ до точки суммирования; E(z) – передаточная функция пути сигнала ошибки, включающего микрофон ошибки – от точки суммирования до входа блока адаптации; Ŝ(z) – оценка S(z)E(z), используемая для предварительной фильтрации опорного сигнала [5].
Оптимальной передаточной функцией АФ является (1):
Поскольку инверсия S(z), как правило, имеет бесконечную импульсную характеристику (ИХ), выбор порядка (количества коэффициентов N) АФ путем приравнивания к длине ИХ идентифицируемой системы [3] невозможен.
Если подавляемый шум содержит одну или несколько гармоник, N принято определять из расчета 4–20 коэффициентов на гармонику. Для системы, работающей со случайным шумом, процедура выбора N не формализована [8].
Тем не менее, выбор порядка АФ является важным этапом разработки системы АПШ. С одной стороны, от N зависит достижимый уровень подавления шума и скорость сходимости алгоритма [3]. С другой стороны, с повышением N увеличивается объем ресурсов, требуемых на реализацию адаптивного алгоритма, что актуально для многоканальных систем АПШ [2; 5].
В данной работе рассматривается MATLAB-модель системы АПШ, предназначенная для выявления характера зависимости уровня подавления шума от порядка АФ, что способствует выбору наименьшего порядка АФ, позволяющего получить требуемый уровень подавления.
При создании модели предполагаются известными: передаточные функции и задержки акустического пути распространения шума и пути компенсации, которые могут быть получены в результате измерений [7] или идентификации [2; 4; 5], характеристики шума, частота дискретизации системы АПШ, шаг сходимости [1] и количество итераций адаптивного алгоритма. Для моделирования АФ используется функция MATLAB adaptfilt.filtxlms [6].
Модель создавалась с соблюдением условия каузальности [2; 4; 5]: задержка акустического пути устанавливалась не меньшей, чем задержка пути компенсации. Также было принято допущение об отсутствии акустической обратной связи [4] между опорным микрофоном и микрофоном ошибки.
Для получения зависимости уровня подавления шума A от N задан набор из J значений Nj, для которого в виде цикла организуется моделирование АФ. Результатом каждого j-го выполнения операций цикла является уровень подавления шума Aj, рассчитанный по формуле (2):
![]() , (2)
, (2)
где: Pxj – средняя мощность опорного сигнала при N=Nj;
Pej – средняя мощность сигнала ошибки при N=Nj. Для расчета Pej берутся отсчеты сигнала ошибки, полученные после завершения процесса сходимости.
Рассмотрим для примера результаты, полученные при использовании в качестве моделей P(z) и S(z) КИХ-фильтров с экспоненциальным затуханием огибающей ИХ, часто встречающимся на практике [3]. ИХ модели S(z) представлена на рисунке 2. ИХ модели P(z) аналогична представленной на рисунке 2, но имеет большую задержку.
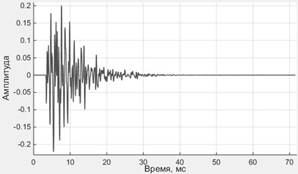
Рисунок 2. ИХ модели S(z), с экспоненциальным затуханием огибающей
В качестве модели опорного сигнала использовался случайный шум с диапазоном частот 100–1500 Гц. Частота дискретизации системы АПШ, которая оптимально должна быть в 10–20 раз выше частот подавляемого шума [4; 8], выбрана равной 15 кГц. Шаг сходимости адаптивного алгоритма выбран достаточно малым, чтобы обеспечить сходимость даже для АФ высоких порядков, и составляет 0,0005. Порядок АФ варьировался от 200 до 2000 коэффициентов. Сигнал ошибки оценивался спустя 3·106 итераций адаптивного алгоритма.
На рисунке 3 представлены полученные в результате моделирования графики зависимости A от N при различных соотношениях задержек P(z) и S(z). Задержка P(z) для всех случаев принималась равной 50 отсчетам; задержка S(z) – от 10 до 55 отсчетов – указана рядом с каждым из графиков.
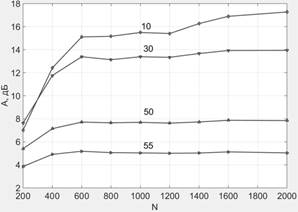
Рисунок 3. Зависимость уровня подавления шума A от порядка АФ N для различных соотношений задержек P(z) и S(z)
Модель системы АПШ позволяет также отследить приближение к характеристикам акустического пути, достигаемое последовательно соединенными W(z) и S(z) при различных N и других параметрах системы. Приближения к АЧХ и групповой задержке акустического пути при N = 400 и N=1400, и задержке пути компенсации на 10 отсчетов представлены на рисунках 4 и 5 соответственно.
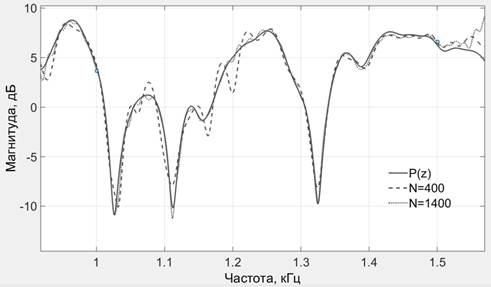
Рисунок 4. АЧХ P(z) и последовательно соединенных W(z) и S(z) для двух значений N (фрагмент рабочего диапазона частот)
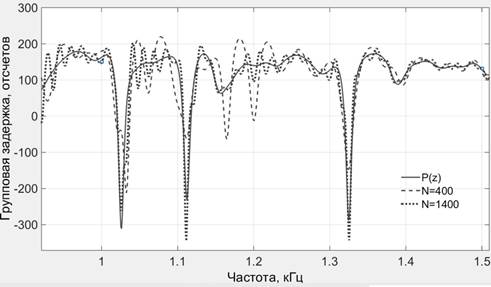
Рисунок 5. Групповые задержки P(z) и последовательно соединенных W(z) и S(z) для двух значений N (фрагмент рабочего диапазона частот)
Согласно рисункам 3–5, при соблюдении условия каузальности уровень подавления шума повышается с увеличением порядка АФ. Однако для N более 600 коэффициентов рост A замедляется. Задержка S(z) в значительной степени влияет на достижимый уровень подавления шума. Наилучшее приближение к характеристикам P(z) достигается на частотах, приблизительно в 10 раз меньших частоты дискретизации системы.
Таким образом, предложенная модель системы АПШ позволяет оценить характер зависимости уровня подавления шума от порядка АФ для заданных параметров шума и системы, и выбрать минимальный порядок АФ, обеспечивающий требования к уровню подавления шума.
Список литературы:
- Джиган В.И. Адаптивная фильтрация сигналов: теория и алгоритмы. М.: Техносфера, 2013. – 528 с.
- Elliott S. Signal processing for active control. Academic Press, 2000.
- Gu Y. et al. Convergence analysis of a deficient-length LMS filter and optimal-length sequence to model exponential decay impulse response //Signal Processing Letters, IEEE. – 2003. – Т. 10. – № 1. – С. 4–7.
- Hansen C.H. et al. Active control of noise and vibration. – 2nd ed. CRC Press, 2013.
- Kuo S.M., Morgan D.R. Active noise control system algorithms and DSP implementations. John Wiley & Sons, 1996.
- MathWorks documentation. FIR adaptive filter that uses filtered-x LMS algorithm. [Электронный ресурс] – Режим доступа. – URL: http://www.mathworks.com/help/dsp/ref/adaptfilt.filtxlms.html?s_tid=srchtitle (дата обращения 15.11.2015).
- Morgan D.R., Quinlan D.A. Local silencing of room acoustic noise using broadband active noise control //Applications of Signal Processing to Audio and Acoustics, 1993. Final Program and Paper Summaries., 1993 IEEE Workshop on. – IEEE, 1993. – С. 23–25.
- Snyder S.D. Active noise control primer. Springer, 2000.
дипломов