Статья опубликована в рамках: LI Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 26 октября 2015 г.)
Наука: Технические науки
Секция: Энергетика и энергетические техника и технологии
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ФИНИТНОЕ УПРАВЛЕНИЕ ПРИВОДАМИ ЛОПАСТЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ
Капля Егор Викторович
канд. физ.-мат. наук, доцент, ведущий научный сотрудник
филиала Московского энергетического института в г. Волжском,
РФ, г. Волжский
FINITE CONTROL BY THE BLADES DRIVES OF THE WIND POWER PLANT
Egor Kaplya
candidate of physics and mathematics, associate professor,
leading researcher branch of Moscow power engineering Institute in Volzhsky,
Russia, Volzhsky
АННОТАЦИЯ
Составлена структурная схема автоматической системы финитного управления сервоприводами лопастей поворотно-лопастного ветроколеса. Предложен закон финитного управления приводами на основе двигателей постоянного тока.
ABSTRACT
The block diagram of an automatic system of finite control by servo-drivers of blades pitch angle control wind turbine is composed. Proposed law finite control actuators based on DC motors.
Ключевые слова: ветроэнергетическая установка; ветроколесо, угол установки лопасти; финитное управление; серводвигатель; сервопривод; лопасть.
Keywords: wind power plant; wind turbine; pitch angle of the blade; finite control; fixed-time control; servo motor; servo-driver; blade.
Повышение энергоэффективности ветроэнергетических установок (ВЭУ) достигается совершенствованием аэродинамических характеристик и оптимизацией систем управления ВЭУ. Современные поворотно-лопастные ВЭУ (ПЛВЭУ) — сложные автоматизированные устройства. Система управления лопастями ВЭУ содержит блок управления и исполнительные механизмы.
Одна из основных задач системы управления ветроэлектрической установкой — стабилизация частоты электрического тока. Частота электрического тока, вырабатываемого синхронным генератором, непосредственно связана с угловой скоростью вращения ветроколеса (ВК). При изменении скорости воздушного потока управление угловой скоростью вращения ВК обычно осуществляется поворотом лопастей [3, с. 8—10] относительно их собственных продольных осей. Поворотно-лопастные механизмы (рис. 1) позволяют стабилизировать частоту вращения ВК и уменьшить аэродинамическую нагрузку ВК при ураганном ветре путём флюгирования лопастей.
Существующие ПЛВЭУ имеют электромеханические или электрогидромеханические сервоприводы. Каждая лопасть, как правило, оснащается индивидуальным сервоприводом. С целью поддержания стабильной частоты тока на выходе генератора ВЭУ и стабильной частоты вращения ВК используют ПИД-регуляторы [4, с. 4].
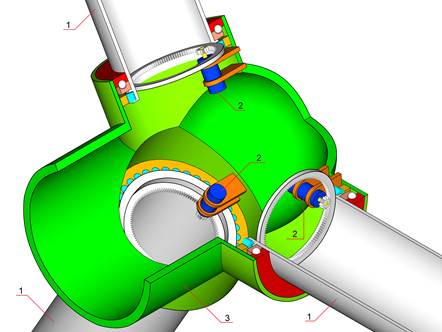
Рисунок 1. Поворотно-лопастное ВК: 1 — лопасть ВК в продольном разрезе; 2 — сервопривод лопасти; 3 — ступица ВК в разрезе ![]()
При запуске ПЛВЭУ лопасти ВК устанавливаются под углом, при котором достигается максимальный вращающий момент на валу ВК, обеспечивается наибольшее угловое ускорение ВК и наименьшая продолжительность разгона. Для останова ВК лопасти устанавливаются во флюгерное положение, в котором вращающий момент минимален. Применение ПИД-регулятора при разгоне и останове ВК приводит к существенному перерегулированию и (или) к появлению ошибки регулирования. В процессе разгона или останова ВК вместо ПИД-закона управления целесообразно использовать алгоритмы финитного управления.
Структурная схема усовершенствованного автоматизированного сервопривода лопасти с двигателем постоянного тока, блоком финитного управления (БФУ) и ПИД-регулятором представлена на рис. 2.
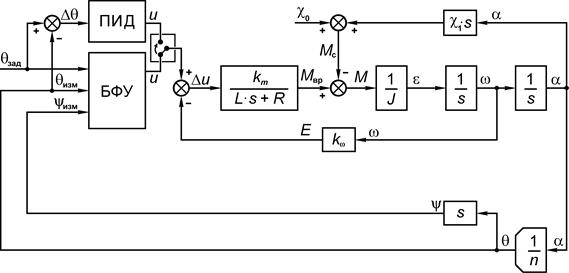
Рисунок 2. Структурная схема автоматизированного сервопривода лопасти
На схеме использованы следующие обозначения: ![]() — суммарный осевой момент инерции вращающихся элементов сервопривода и лопасти, приведённый к валу двигателя;
— суммарный осевой момент инерции вращающихся элементов сервопривода и лопасти, приведённый к валу двигателя; ![]() — угол поворота ротора двигателя;
— угол поворота ротора двигателя; ![]() — ток в цепи якоря;
— ток в цепи якоря; ![]() — коэффициент пропорциональности, связывающий ток в цепи якоря и развиваемый двигателем вращающий момент;
— коэффициент пропорциональности, связывающий ток в цепи якоря и развиваемый двигателем вращающий момент; ![]() — напряжение питания двигателя;
— напряжение питания двигателя; ![]() — момент сопротивления нагрузки;
— момент сопротивления нагрузки; ![]() — передаточное число редуктора сервопривода лопасти — отношение угловой скорости поворота лопасти к угловой скорости вращения ротора двигателя;
— передаточное число редуктора сервопривода лопасти — отношение угловой скорости поворота лопасти к угловой скорости вращения ротора двигателя; ![]() — индуктивность цепи якоря;
— индуктивность цепи якоря; ![]() — активное сопротивление цепи якоря;
— активное сопротивление цепи якоря; ![]() — коэффициент противоЭДС;
— коэффициент противоЭДС; ![]() — угловая скорость поворота ротора двигателя;
— угловая скорость поворота ротора двигателя; ![]() — угловая скорость поворота лопасти;
— угловая скорость поворота лопасти; ![]() — момент трогания сервопривода с нагрузкой;
— момент трогания сервопривода с нагрузкой; ![]() — коэффициент динамического сопротивления редуктора и лопасти;
— коэффициент динамического сопротивления редуктора и лопасти; ![]() — противоЭДС;
— противоЭДС; ![]() ;
; ![]() — вращающий момент, создаваемый двигателем;
— вращающий момент, создаваемый двигателем; ![]() ;
; ![]() — мгновенное угловое ускорение ротора двигателя;
— мгновенное угловое ускорение ротора двигателя; ![]() — заданное значение угла установки лопасти;
— заданное значение угла установки лопасти; ![]() — измеренное значение угла установки лопасти;
— измеренное значение угла установки лопасти; ![]() — ошибка управления;
— ошибка управления; ![]() .
.
Передача вращающего момента от вала двигателя к лопасти осуществляется зубчатыми колёсами редуктора. Такую передачу можно считать жёсткой и использовать соотношения: ![]() ,
, ![]() .
.
Угловое ускорение ротора двигателя постоянного тока пропорционально напряжению питания: ![]() , где
, где ![]() — коэффициент пропорциональности между напряжением питания двигателя и угловым ускорением ротора.
— коэффициент пропорциональности между напряжением питания двигателя и угловым ускорением ротора.
Редуктор сервопривода лопасти позволяет увеличить вращающий момент и точность углового позиционирования лопасти. Контроль углового положения лопастей осуществляют с помощью энкодеров. Контроллер системы управления сервоприводами лопастей и серводвигатели лопастей устанавливаются во внутренней полости ступицы ВК. В каждый момент времени лопасти подвергаются различным механическим нагрузкам. Оснащение каждой лопасти независимым сервоприводом, предполагает индивидуальный контроль углового положения каждой лопасти.
Известный закон финитного управления [1, с. 59] принимает вид:
|
|
(1) |

где: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() — момент времени начала переходного процесса;
— момент времени начала переходного процесса;
![]() — терминальное время (продолжительность поворота лопасти от
— терминальное время (продолжительность поворота лопасти от ![]() до
до ![]() );
);
![]() — жёсткость управления.
— жёсткость управления.
В начальном и конечном состоянии угловая скорость поворота лопасти равна нулю ![]() . Финитный закон управления (1) не требует задания точного начального положения лопастей. Закон (1) использует измеренные значения
. Финитный закон управления (1) не требует задания точного начального положения лопастей. Закон (1) использует измеренные значения ![]() и
и ![]() .
.
В системе управления приводами постоянного тока ПИД-регуляторы формируют в качестве сигнала управления напряжение на обмотках двигателя:
|
|
(2) |

где: ![]() ;
;
![]() — коэффициент усиления пропорциональной составляющей регулятора;
— коэффициент усиления пропорциональной составляющей регулятора;
![]() — постоянная интегрирования;
— постоянная интегрирования;
![]() — постоянная дифференцирования.
— постоянная дифференцирования.
Настройка ПИД-регулятора выполняется на основе математической модели переходных процессов поворота лопасти путём минимизации целевой функции. В качестве целевой функции можно принять [2, с. 16]:
|
|
(3) |
 .
.
Функция (3) соответствует настройке регулятора по конечной фазовой точке ![]() . Применение ПИД-закона управления углом установки лопасти при разгоне или останове ВК приводит к существенному перерегулированию угловой скорости поворота лопасти или угла установки лопасти.
. Применение ПИД-закона управления углом установки лопасти при разгоне или останове ВК приводит к существенному перерегулированию угловой скорости поворота лопасти или угла установки лопасти.
Заключение
Финитное управление сервоприводами лопастей ВЭУ целесообразно при установке лопастей в разгонное или флюгерное положение.
Финитный закон управления может применяться в комбинации с ПИД-законом управления углом установки лопасти. Финитное управление может использоваться при разгоне или останове ВК, а ПИД-закон в разогнанном состоянии при достаточной скорости ветра.
Список литературы:
- Батенко А.П. Управление конечным состоянием движущихся объектов. — М.: Советское радио, 1977. — 256 с.
- Капля Е.В. Система финитного управления приводами лопастей ветроэнергетической установки. // Автоматизация и современные технологии. — 2013. — № 5. — С. 13—18.
- Johnson K.E. Adaptive torque control of variable speed wind turbines. // National Renewable Energy Laboratory / TP-500-36265 — August 2004. — 107 p.
- Wright A.D., Fingersh L.J. Advanced control design for wind turbines. // National Renewable Energy Laboratory / TP-500-42437 — March 2008. — 148 p.
дипломов