
Статья опубликована в рамках: IX Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 17 апреля 2012 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

АЛГОРИТМ ПЛАНИРОВАНИЯ МАНЕВРА ПАРАЛЛЕЛЬНОЙ ПАРКОВКИ МОБИЛЬНОГО РОБОТА
Саловская Анна Алексеевна
магистрант группы 10ИВТ-1мг БГТУ, г.Брянск
E-mail: annet3116@gmail.com
Буйвал Александр Константинович
канд. техн. наук, доцент БГТУ, г.Брянск
PARALLEL PARKING PLANING ALGORITHM OF A MOBILE ROBOT
Anna Salovskaya
master of the group10IVT-1mg of Bryansk State Technical University, Bryansk
Aleksander Buyval
Candidate. Technical. , Associate Professor of Bryansk State Technical University, Bryansk
АННОТАЦИЯ
Целью данного исследования являлась разработка на базе конструктора Lego Mindstorm NXT алгоритма управления автомобиле-подобным роботом для выполнения параллельной парковки. В работе предложен метод выполнения маневра, основанный на переборе возможных траекторий в зависимости от угла поворота колес робота. Результатом работы является сконструированная модель транспортного средства и реализованный на ней алгоритм автоматической параллельной парковки для использования в учебных и научных целях. Реализованный в системе ROS алгоритм минимизирует возможные ошибки о положении робота в пространстве.
ABSTRACT
The aim of this study was to develop a based on the Lego Mindstorm NXT parallel parking algorithm car-like robot. In this paper was propose a method for the maneuver, based on exhaustive search of possible trajectories depending on the angle of rotation of wheels of the robot. The result of this paper is to construct a model of the vehicle and realized algorithm to automatic parallel parking for use in educational and scientific purposes. ROS system is implemented in the algorithm; it minimizes the errors of the robot's position in space.
Ключевые слова: автомобиле-подобный робот; парковка; датчики; расширенный фильтр Калмана; алгоритм.
Keywords: car-like robot; parking; sensors; Extended Kalman Filter; algorithm.
В работе рассмотрена актуальная проблема, связанная с благоустройством городской жизни, а именно проблема парковки. В условиях плотного транспортного потока, а также в условиях нехватки парковочного места, решающим фактором становится способность водителя умело расположить автомобиль на стоянке (парковке) [2].
В качестве решения проблемы предлагается автопарковка, когда автомобиль совершает парковочный маневр без участия водителя в автоматическом режиме. В представленной работе рассматривается модель автомобиле-подобного робота Lego Mindstrom NXT. Робот оснащен несколькими датчиками (ультразвуковым дальномером, энкодерами, камерой, электронным компасом, визуальной одометрией), которые улучшают управляемость системы и позволяют получать данные о положении робота в пространстве, а также расстояние до различных препятствий. Энкодеры позволяют определять перемещения и повороты робота по положению и вращению колес. Одной из проблем является скольжение и пробуксовка колес робота. Ультразвуковой дальномер позволяет получать расстояние до препятствий одновременно для большого угла обзора (до 120 градусов и более). Электронный компас корректирует положение робота, позволяет устанавливать автомобиль строго параллельно месту стоянки. Проблема интеграции различных датчиков решается с применением расширенного фильтра Калмана (Extended Kalman Filter EKF) [1, c. 4]. На этапе прогноза EKF использует информацию о законах движения робота, а на этапе коррекции информацию с датчиков.
В начале, чтобы обнаружить стоянку, робот сравнивает все измерения с минимальным значением (начальное значение нулевой ширины), это ширина места парковки. Пока значение постоянно, робот продолжает движение, как только ширина свободного пространства увеличивается, состояние фиксируется как начальное. Измерение продолжается до тех пор, пока расстояние не будет соответствовать минимально возможному месту парковки. Как только место парковки достигает минимально возможной длины, то оно считается найденным [3].
В связи с наличием нескольких источников о положении робота был разработан алгоритм нахождения оптимальной траектории маневра параллельной парковки. Он похож на алгоритм A* и состоит из четырех последовательных шагов (рис.1a). Основная сложность маневра состоит в правильном расчете разворота угла передних колес робота на этапе 2—3. Также, алгоритм предполагает, что робот-автомобиль стоит параллельно с местом парковки. Поэтому, если угол по отношению к автостоянке превышает 3°, первый шаг заключается в корректировке направления робота. C помощью ультразвукового дальномера робот оценивает возможность совершения маневра парковки. Как только свободное место найдено, робот двигается задним ходом (маневр 1) до положения, когда задние колеса будут выровнены на одной ширине со стеной стоянки q2q4 (рис. 1a).
С целью минимизации возникновения ошибки при расчете положения робота и траектории движения с различных датчиков, строится оптимальный маршрут движения до заданной точки K (опорная точка алгоритма). Координаты этой точки постоянны и заранее вычисляются; ее положение определяется, как половина глубины стоянки по оси Y и постоянное расстояние от стенки стоянки q1q3 по оси X. Учитывая максимальный угол вращения передних колес робота (от 0° до 30°), рассчитываются возможные траектории маневра 2—3. С минимальным шагом в 5° поворота колес строятся две равные дуги. При этом учитываются кинематические свойства робота: длина и ширина робота, ширина колесной базы, максимальный угол разворота колес. Относительно точки K выбирается окрестность S (рис. 1b).
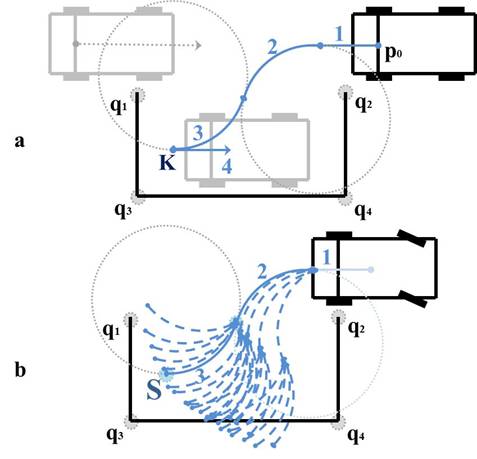
Рис.1. Иллюстрация маневра парковки робота.
В случае нахождения конечной точки одной из возможных траекторий маневра 2—3, в окрестности S, путь отмечается оптимальным, и робот выполняет движение по этой траектории. Последний сегмент добавляется путем определения центра парковки (этап 4).
В ходе работы построены оптимальные траектории парковочного маневра, наиболее рациональные для конкретного объекта. Написана программа в среде ROS, реализующая алгоритм на роботе в режиме реального времени. Робот связывается с компьютером посредством Bluetooth. Алгоритм парковки выполняется в узле «parking», который публикует позицию робота «odometry». Узел «lego proxy» преобразует данные с датчиков и передает команды выполнения парковки узлу «parking» (рис. 2).

Рис.2. Архитектура системы.
Алгоритм, использованный в программе устойчив к появлению внешних помех в виде препятствий.
В ходе дальнейшей работы над алгоритмом планируется использовать GPS для повышения качества одометрии, добавить дальномер для работы алгоритма в стесненных условиях (сравнительно малых с длиной робота размерах стоянки).
Список литературы:
1.Дегтярев, А. А. Элементы теории адаптивного расширенного фильтра Калмана / А. А. Дегтярев, Ш. Тайль. – Препринт ИПМ им. М. В. Келдыша РАН. – М, 2003. – № 26. – 35 с.
2.Параллельная парковка задним ходом [Электронный ресурс]. – Режим доступа. http://autoshpilka.ru/forum/viewtopic.php?t=1073 (дата обращения: 14.02.12)
3.Yanan, Zhao. Robust automatic parallel parking in tight spaces via fuzzy logic / Z. Yanan, G. Emmanuel, Jr. Collins // Robotics and Autonomous Systems. 2005. Vol. 51 P. 10—17.
дипломов