Статья опубликована в рамках: III Международной научно-практической конференции «Наука вчера, сегодня, завтра» (Россия, г. Новосибирск, 21 августа 2013 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ОПРЕДЕЛЕНИЕ РЕЗУЛЬТИРУЮЩЕЙ СИЛЫ ПРИВОДНОГО ЭЛЕМЕНТА
Охотников Михаил Валерьевич
аспирант, УГАТУ, г. Уфа
E-mail: oxothukob@mail.ru
В рамках проекта по исследованию электротехнического трубоходного комплекса [2], проводилось экспериментальное исследование приводных элементов трубоходных комплексов. Электромагнитную силу, действующую на якорь приводного элемента (ПЭ), возможно рассматривать как сумму составляющих ![]() , а при трехмерном рассмотрении и
, а при трехмерном рассмотрении и ![]() (рисунок. 1),
(рисунок. 1), ![]() — направлена вдоль продольной оси якоря,
— направлена вдоль продольной оси якоря, ![]() — направлена по касательной к траектории действия якоря, перпендикулярно к
— направлена по касательной к траектории действия якоря, перпендикулярно к ![]() ,
, ![]() — направлена перпендикулярно по отношению к
— направлена перпендикулярно по отношению к ![]() вдоль статора ПЭ [1].
вдоль статора ПЭ [1].
Составляющая ![]() — при учете симметричности магнитной системы, с Ш-образным магнитопроводом, будет равна 0.
— при учете симметричности магнитной системы, с Ш-образным магнитопроводом, будет равна 0.
![]() =0
=0
Для сравнения ПЭ с прямо ходовым якорем имеет составляющие ![]() и
и ![]() — при учете допущений равные 0.
— при учете допущений равные 0.
![]() =0,
=0, ![]() =0
=0
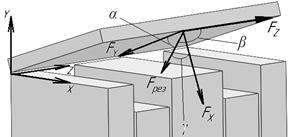
Рисунок 1. Расчетная схема результирующей силы в зазоре ПЭ не имеющего геометрических особенностей рабочих поверхностей
При рассмотрении ПЭ с поворотным якорем, в виду не симметрии геометрических соотношений рабочего зазора, составляющая ![]() ,. Таким
,. Таким
образом составляющие ![]() ,
,![]() (рисунок. 1) для ПЭ можно рассмотреть как:
(рисунок. 1) для ПЭ можно рассмотреть как:
![]() ; (1)
; (1)
 ; (2)
; (2)
 ; (3)
; (3)
где: ![]() проводимость, основного и крайних зазоров ПЭ;
проводимость, основного и крайних зазоров ПЭ;
![]() угол отклонения якоря ПЭ;
угол отклонения якоря ПЭ;
![]() — ток в витке катушки;
— ток в витке катушки;
![]() — число витков катушки.
— число витков катушки.
Аналогично определению силы ПЭ с равномерным зазором, сила действующая в ПЭ со сложной формой рабочих поверхностей статора и якоря, раскладывается на ![]() – е количество участков (рисунок 2), сохраняющих равномерный зазор на каждом участке, что определяется из суммы результирующих сил на каждом из участков данного ПЭ.
– е количество участков (рисунок 2), сохраняющих равномерный зазор на каждом участке, что определяется из суммы результирующих сил на каждом из участков данного ПЭ.
![]() ; (4)
; (4)
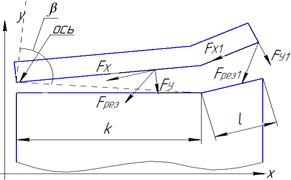
Рисунок 2. Расчетная модель магнитной системы ПЭ со сложной формой рабочих поверхностей статора и якоря
Результирующая (суммарная) сила радиальных и аксиальных составляющих (рисунок. 2), но без учета ![]() рассчитывается:
рассчитывается:
 ; (5)
; (5)
где: ![]() Гн/м — магнитная проницаемость вакуума;
Гн/м — магнитная проницаемость вакуума;
![]() — число витков катушки;
— число витков катушки;
![]() — площадь рабочей поверхности основного и боковых полюсов статора;
— площадь рабочей поверхности основного и боковых полюсов статора;
![]() — переменная составляющая рабочего зазора,
— переменная составляющая рабочего зазора,
![]() — постоянная составляющая рабочего зазора.
— постоянная составляющая рабочего зазора.
Экспериментальное определение тягового усилия ПЭ со сложной формой рабочих поверхностей (рисунок 3, а) и ПЭ имеющего ровные рабочие поверхности статора и якоря (рисунок 3, б), проводилось на смоделированных макетных образцах ПЭ
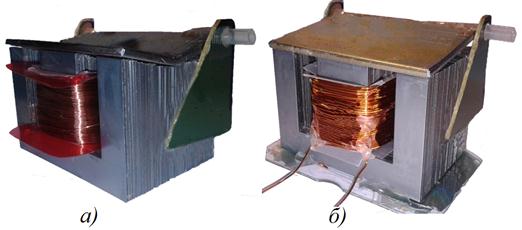
Рисунок 3. ПЭ со сложной формой рабочих поверхностей статора и якоря (а)и формой рабочих поверхностей без изменений (б)
Проведение экспериментальных исследований ПЭ проводилось по заранее определенным параметрам, угла поворота, приложенного напряжения. В процессе проведения эксперимента снимались статические тяговые характеристики ПЭ, результаты которого занесены в таблицы 1 и 2.
По итогам замеров на (рисунок 4) и (таблица 1), приведены кривые статической тяговой характеристики ПЭ без геометрических особенностей рабочих поверхностей, а так же характеристики полученные путем, аналитического расчета.
Таблица 1.
экспериментальное статической тяговой характеристики ПЭ
|
|
Угол поворота якоря, град |
||||||||||
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
1 |
0,072 |
0,0641 |
0,0559 |
0,03 |
0,029 |
0,022 |
0,012 |
0,009 |
0,003 |
|
|
Рисунок 4. Статические тяговые характеристики ПЭ без изменений рабочих поверхностей: 1 — характеристика аналитического расчета; 2 — экспериментальное значение
Так же проводились испытания ПЭ со сложной формой рабочих поверхностей статора и подвижного элемента. В (таблица 2) приведены результаты полученные при экспериментальном анализе, на рисунок 5 приведена кривая статической тяговой характеристики по данным таблицы 2, а так же приведена характеристика полученная аналитически.
Таблица 2.
экспериментальные статические тяговые характеристики ПЭ
|
|
Угол поворота якоря, град |
||||||||||
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
1 |
0,07 |
0,061 |
0,048 |
0,058 |
0,0025 |
0,019 |
0,001 |
0,0068 |
0,0054 |
|
|
Рисунок 5. Статические тяговые характеристики ПЭ со сложной формой рабочих поверхностей изменений рабочих поверхностей: 1 — характеристика аналитического расчета; 2 — экспериментальное значение
Основываясь на значениях характеристик рисунок 4 и рисунок 5, можно сделать вывод о том, что данные экспериментального и аналитического расчета находятся в пределах 10 % погрешности. Что является достаточно хорошим результатом.
Список литературы:
1.Вышков Ю.Д., Иванов В.И. Магнитные опоры в автоматике. М.: Энергия,1978. — 160 с., ил.
2.Охотников М.В. Внутритрубное транспортное средство на основе линейного шагового электромагнитного двигателя / М.В. Охотников // // Научная дискуссия: инновации в современном мире. Материалы XII международной научно-практической конференции, М., 2013. — С. 19—23.
дипломов