Статья опубликована в рамках: III Международной научно-практической конференции «Наука вчера, сегодня, завтра» (Россия, г. Новосибирск, 21 августа 2013 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

АСИНХРОННЫЕ ЧАСТОТНО-РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ ДЛЯ СИСТЕМ ЭНЕРГОСБЕРЕЖЕНИЯ
Алексеев Владислав Алексеевич
канд. техн. наук, профессор Волжский филиал Московского автомобильно-дорожного государственного технического университета (МАДИ) г. Чебоксары
Артемьев Виктор Степанович
аспирант ФГБОУ ВПО «Чувашская государственная сельскохозяйственная академия» г. Чебоксары
Введение
В современных производственных механизмах, особенно в гибких производственных системах (ГПС), электропривод является одним из элементов, определяющих технологические возможности и надежность функционирования механизмов. Благодаря простоте и надежности асинхронного двигателя с короткозамкнутым ротором (АД), как за рубежом, так и в нашей стране все более широкое распространение в различных отраслях народного хозяйства находят частотно-регулируемые электроприводы.
Ранее в основном использовали тиристорные электроприводы на базе двигателей постоянного тока (ДПТ), с простой схемой управления, хорошими статическими и динамическими показателями. ДПТ, с высоким быстродействием регулирования скорости. Но щеточно-коллекторный узел ДПТ состоит из большого количества медных сегментов, разделенных тонким слоем изолирующего материала, например, слюды. Такая конструкция требует тщательного изготовления, трудоемка в изготовлении. Износ щеток и коллектора усиливается при искрении, а диэлектрические свойства слюды ограничивают напряжение меду сегментами. Ток якоря и его приращение имитируется условиями коммутации. Ротор АДКЗР имеет короткозамкнутую обмотку, изготавливаемую литьем. Стержни обмотки не требуется изолировать от пластин сердечника ротора: АД с беличьей клеткой имеют малый момент инерции и могут длительно работать при высоких температурах и скоростях вращения без профилактики. Такие АД значительно дешевле ДПТ с такими же значениями мощности и скорости. Их удельная мощность (отношение мощности АД с беличьей клеткой и его массе) в два раза больше, чем у ДПТ.
Очевидна и меньшая величина ущерба от простоя и ремонтов, особенно в дорогостоящих ГПС, из-за простоты АД, чем при применении ДПТ.
Благодаря простоте и надежности асинхронного двигателя с короткозамкнутым ротором (АД) все больше распространяют в системах энергосбережения частотно-регулируемые электроприводы (ЧРЭП), в том числе выполненные на базе АД и преобразователей частоты. Например, разработанные во ВНИИР тиристорные асинхронные электроприводы серии ЭТА1-01 [1], на базе трехфазно- двухфазных преобразователей частоты с непосредственной связью (НПЧ) и двухфазных асинхронных двигателей (АД) с короткозамкнутым ротором высот оси вращения от 112 до 355 мм (в дальнейшем «электроприводы»), предназначенные для использования в различных производственных механизмах охватывают диапазон мощностей 3,0…265 кВт при номинальных скоростях вращения 1000 и 2000 об/мин.
Электроприводы обеспечивают следующие режимы работы:
· пуск до заданной скорости с регулируемым темпом разгона;
· плавное регулирование скорости от нуля до номинальной скорости при работе «Вперед» и «Назад»;
· рекуперативное с регулируемым темпом торможения;
· реверс с любой скорости.
Питание электроприводов осуществляется от трехфазной промышленной сети переменного тока напряжением 380 В частоты 50 Гц — для нужд народного хозяйства.
Применение двухфазного двигателя с короткозамкнутым ротором вместо традиционного трехфазного позволило дополнительно улучшить технико-экономические показатели ЧРЭП с НПЧ, поскольку при этом незначительном ухудшении показателей двигателя (снижение момента на 3—10 %) существенно почти в полтора раза упрощается силовая часть и система управления НПЧ с соответственным повышением надежности [1].
При выборе целесообразного построения асинхронного частотно- регулируемого электропривода, определения областей рационального применения ЧРЭП и рассмотрения конкурентоспособности был сопоставлен весь комплекс показателей с коэффициентами их относительной весомости, а именно технико- экономические показатели (включая массогабаритные); энергетические; динамические; эксплуатационные; надежность и другие.
Электроприводы ЭТА1-01 мощностью до 30 кВт обеспечивают полосу пропускания частот при отсутствие дополнительных моментов инерции и при задающем напряжение, соответствующем линейной области, не менее 20 т Гц. Для электроприводов ЭТА1-01 мощностью более 30 кВт и для электропривода ЭТА1-02 полоса пропускания частот не лимитируется.
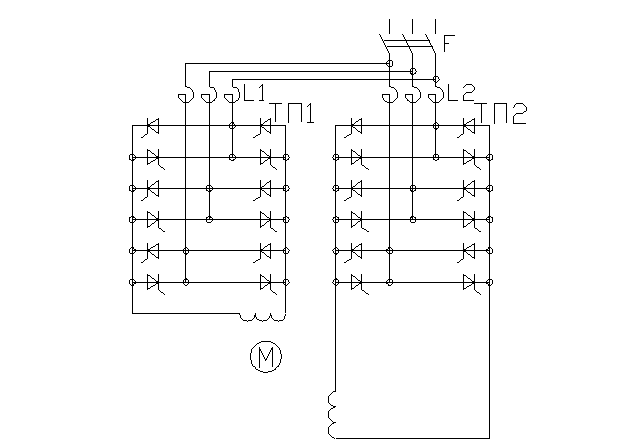
Рисунок 1.Схема силовой части электропривода
Электропривод тиристорный асинхронный серии ЭТА1-01 на базе тиристорного преобразователя частоты с непосредственной связью и двухфазного асинхронного двигателя типа АДЧ или АИФ.
Электропривод (рис 1, 2) на базе трехфазно-двухфазного преобразователя частоты (ПЧ) реализует частотно-токовый способ управления и принцип ориентации системы координат двигателя путем задания угла поворота ее осей относительно ротора двигателя [1, 2, 4].
Силовая схема ПЧ состоит из двух реверсивных тиристорных преобразователей постоянного тока типа ТП1 и ТП2 с раздельным управлением комплектами вентилей. Статорные обмотки асинхронного двигателя М питаются от автономных преобразователей, гальванически развязанных друг от друга.
В систему управления электропривода входят: задатчик интенсивности ЗИ, предназначенный для формирования темпа разгона и торможения двигателя; ПИ-регулятор скорости РС; координатный преобразователь КП, предназначенный для задания синусоидальных токов в обмотках двигателя; узел «напряжение-частота» УНЧ, предназначенный для преобразования аналогового реверсивного выходного сигнала регулятора скорости ωs![]() Uрс в положительные прямоугольные импульсы с частотой следования, пропорциональной частоте скольжения ротора двигателя; узел формирования узких импульсов УФИ, выполняющий преобразование выходных импульсов УНЧ и импульсов датчика положения ДПР (fос) в сдвинутые по времени друг от друга синхронизированные импульсы ωри и ωsи; узел направления вращения УНВ и узел логики УЛ, формирующие в зависимости от знаков аналоговых сигналов ωs и ωр команд «вперед» или «назад», определяющих режим работы электропривода (двигательный или тормозной) и формирующих команды на пропускание на входы счетчика генератор синусоидальных колебаний ГСК суммы и разности импульсных сигналов ωsи и ωри; генератор синусоидальных колебаний ГСК, преобразующий импульсные сигналы ω1и в синусоидальные кодовые сигналы
Uрс в положительные прямоугольные импульсы с частотой следования, пропорциональной частоте скольжения ротора двигателя; узел формирования узких импульсов УФИ, выполняющий преобразование выходных импульсов УНЧ и импульсов датчика положения ДПР (fос) в сдвинутые по времени друг от друга синхронизированные импульсы ωри и ωsи; узел направления вращения УНВ и узел логики УЛ, формирующие в зависимости от знаков аналоговых сигналов ωs и ωр команд «вперед» или «назад», определяющих режим работы электропривода (двигательный или тормозной) и формирующих команды на пропускание на входы счетчика генератор синусоидальных колебаний ГСК суммы и разности импульсных сигналов ωsи и ωри; генератор синусоидальных колебаний ГСК, преобразующий импульсные сигналы ω1и в синусоидальные кодовые сигналы

Рисунок 2. Система управления электропривода
sinω1t и cosω1t с помощью которых модулируются опорные сигналы ![]() и
и ![]() в КП; два пропорциональные регулятора тока РТ1–РТ2; датчики тока ДТ1, ДТ2; нелинейные звенья (НЗ1, НЗ2), поддерживающие постоянство коэффициента усиления тиристорных преобразователей (ТП1, ТП2) в режимах непрерывного и прерывистого токов; функциональный преобразователь э.д.с. ФПЕ1, ФПЕ 2, компенсирующие нелинейности характеристик ТП. Системы НЗ и ФПЕ образуют адаптивное устройство, линеаризующее структуру электропривода и улучшающее его динамические характеристики; формирователи э.д.с. ФЕ1 и ФЕ2, формирующие синхронизированные с активной составляющей тока статора синусоидальные сигналы е1, е2; датчики проводимости вентилей ДПВ1 и ДПВ2, обеспечивающие переключение блоков логики ЛУ1 и ЛУ2 только при отсутствии токов в цепях статора; системы импульсно-фазового управления (СИФУ), преобразующая управляющее напряжения системы автоматического регулирования электроприводом, в последовательность прямоугольных управляющих импульсов соответствующей фазы. СИФУ, состоящая из управляющего органа УО1, формирователя импульсов УФИ1 и ключей В1, Н1, выполнена по вертикальному принципу.
в КП; два пропорциональные регулятора тока РТ1–РТ2; датчики тока ДТ1, ДТ2; нелинейные звенья (НЗ1, НЗ2), поддерживающие постоянство коэффициента усиления тиристорных преобразователей (ТП1, ТП2) в режимах непрерывного и прерывистого токов; функциональный преобразователь э.д.с. ФПЕ1, ФПЕ 2, компенсирующие нелинейности характеристик ТП. Системы НЗ и ФПЕ образуют адаптивное устройство, линеаризующее структуру электропривода и улучшающее его динамические характеристики; формирователи э.д.с. ФЕ1 и ФЕ2, формирующие синхронизированные с активной составляющей тока статора синусоидальные сигналы е1, е2; датчики проводимости вентилей ДПВ1 и ДПВ2, обеспечивающие переключение блоков логики ЛУ1 и ЛУ2 только при отсутствии токов в цепях статора; системы импульсно-фазового управления (СИФУ), преобразующая управляющее напряжения системы автоматического регулирования электроприводом, в последовательность прямоугольных управляющих импульсов соответствующей фазы. СИФУ, состоящая из управляющего органа УО1, формирователя импульсов УФИ1 и ключей В1, Н1, выполнена по вертикальному принципу.
Работа схемы осуществляется следующим образом: задающее воздействие через ЗИ поступает на вход регулятора скорости РС, где сравнивается с сигналом обратной связи по скорости ωр, снимаемым с тахогенератора BR. Регулятор скорости РС формирует аналоговый сигнал задания ωs, пропорционально которому задается приведенный к статору ток ротора ![]() . Сигнал, пропорциональный
. Сигнал, пропорциональный ![]() , подается на вход координатного преобразователя КП. На второй вход КП поступает сигнал задания амплитуды тока намагничивания Iμ. Координатный преобразователь преобразует опорные входные сигналы
, подается на вход координатного преобразователя КП. На второй вход КП поступает сигнал задания амплитуды тока намагничивания Iμ. Координатный преобразователь преобразует опорные входные сигналы ![]() и Iμ в сигналы задания синусоидальных токов i=iα и i=iβ, поступающих на входы регуляторов тока РТ1 и РТ2.
и Iμ в сигналы задания синусоидальных токов i=iα и i=iβ, поступающих на входы регуляторов тока РТ1 и РТ2.
УНЧ преобразует аналоговый сигнал задания частоты скольжения ωs РС в прямоугольные импульсы с частотой следования, пропорциональной частоте скольжения ротора двигателя. Узел сложения-вычитания УСВ на основе информации о частоте скольжения ωsи и частоте вращения ωри, а также информации узла логики УЛ формирует сигнал задания скорости ротора ω1и. Если знаки этих сигналов совпадают, то узел логики УЛ выдает в УСВ команду на сложение импульсных сигналов, т.е. ![]() , что соответствует двигательному режиму работы. Если знаки ωsи и ωри не совпадают, то в УСВ происходит вычитание импульсных сигналов ωsи и ωри и двигатель переходит в тормозной режим работы.
, что соответствует двигательному режиму работы. Если знаки ωsи и ωри не совпадают, то в УСВ происходит вычитание импульсных сигналов ωsи и ωри и двигатель переходит в тормозной режим работы.
Направление вращения вектора поля статора задается в узел логики УЛ в зависимости от знаков аналоговых сигналов ωs, ωр. Каналы управления тиристорными преобразователями ТП1 и ТП2 полностью аналогичны друг другу. Рассмотрим один из них. На входе П-регулятора тока РТ1 осуществляется алгебраическое сложение сигнала задания синусоидального тока iа и сигнала отрицательной обратной связи, формируемого задатчиком ДТ1 и ПХ3. Выходное напряжение РТ1 поступает на вход НЗ1, имеющего характеристику обратную регулировочной характеристике преобразователя в зоне прерывистых токов, что обеспечивает постоянство общего коэффициента передачи ТП1 в режимах непрерывного и прерывистого токов.
Формирователь э.д.с. ФЕ1 и функциональный преобразователь ФПЕ1 с арксинусной характеристикой компенсируют нелинейность характеристики «вход-выход» тиристорного преобразователя ТП1. Далее сигнал поступает на ПХ1 и на СИФУ (управляющий орган 1 УО1, УФИ1 и ключи В1, Н1), которая подает команду на открывание тиристоров.
Диапазон регулирования скорости электроприводов ЭТА1-02 для производственных механизмов, не требующих широкого регулирования скорости, не более 1:10, но более высокая надежность по сравнению с электроприводами ЭТА1-01 из-за отсутствия датчика ПДФ-9 на валу двигателя. Тиристорные блоки обеих модификаций электроприводов имеют одни и те же конструкции, меняются лишь две платы системы управления.
Как правило, во многих отраслях народного хозяйства, в т. ч. жилищно-коммунальном хозяйстве (ЖКХ), установлены электродвигатели с большим запасом по мощности в расчете на максимальную производительность оборудования, несмотря на то, что часы пиковой нагрузки составляют всего 15—20 % общего времени его работы. В результате электродвигатели с постоянной скоростью вращения потребляют среднесуточно значительно, иногда до 60 %, больше электроэнергии, чем это необходимо.
Оценка мировой и отечественной практики показывает, что наибольший экономический эффект при реализации программ энергосбережения дает использование асинхронных электроприводов (55—60 % всей потребляемой энергии) в отраслях промышленности (прессы, станки, электротранспортеры и конвейеры, печи, мельницы и др. и коммунального хозяйства.)
Наиболее дающим большую экономию электроэнергии способом (до 30—50 %) является оснащение АД частотными преобразователями, позволяющими регулировать частоту их вращения в зависимости от реальной нагрузки [3].
В жилищно-коммунальном хозяйстве это:
·насосы холодной и горячей воды в центральных тепловых пунктах;
·насосные установки водоканальных и тепловых сетей и очистных станций;
·компрессоры, вентиляторы, кондиционеры, установленные в зданиях.
В топливно-энергетическом комплексе:
·буровые установки, насосы нефтеперекачки;
·экскаваторы, электротрансмиссии мощных карьерных самосвалов, карьерные дизель-троллейвозы, транспортеры и конвейеры, дробилки и мельницы, шахтные подъемные машины и шахтный электротранспорт;
·насосные и вентиляторные установки ТЭС, ТЭЦ, РТС и котельных, насосные установки тепловых сетей и др.
В целом электродвигатели мощностью до 100 кВт составляют ~ 90 % и потребляют 90 % электроэнергии, преобразуемой в механическую.
Следующее достоинство регулируемого электропривода — это снижение эксплуатационных затрат (снижение величины пусковых токов, исключая вредное их воздействие на питающую сеть; исключение из работы дросселей, заслонок, различных клапанов, гидроударов в гидравлической сети, плавным изменением подачи воздуха в вентиляторах и др.; увеличение срока службы вращающихся частей, со значительным снижением эксплуатационных расходов и возможности аварий оборудования.)
Разработка и внедрение регулируемого электропривода является одним из самых перспективных и экономически оправданных направлений из всех энергосберегающих технологий и обеспечит в народном хозяйстве экономию энергоносителей (от общего потребления): электроэнергии до 15—20 %, воды питьевого качества до 10—12 %, топлива — 8—10 % и экономию денежных средств за счет уменьшения потребления энергоносителей. Сроки окупаемости внедрения регулируемого электропривода менее одного года.
Впервые разработанные электроприводы на базе двухфазных асинхронных двигателей с непосредственными преобразователями частоты имеют технические характеристики, близкие электроприводам постоянного тока, внедрены кроме вышеперечисленных областей, в областях, где не могут использоваться двигатели постоянного тока и асинхронные двигатели с фазным ротором (предприятия мукомольной, химической, текстильной и др.)
Список литературы:
1.Алексеев В.А., Горчаков В.В., Гудков И.И., Чернов Н.П. Электроприводы тиристорные асинхронные серии ЭТА1-00. (Отраслевой каталог) М.: Информэлектро, 1998 г.
2.Алексеев В.А. и др. Частотно-регулируемые электроприводы на базе двухфазных асинхронных двигателей и преобразователей. М.: Электротехника, — № 5, — 1989.
3.Алексеев В.А., Артемьев В.С. Энергосберегающие технологии для автотранспортной отрасли. Чебоксары, Волжский филиал МАДИ, 2012. — 192 с.
4.Алексеев В.А. Электроприводы асинхронные в системах энергосбережения//Сборник материалов VI научно-практической конференции «Дорожно-транспортный комплекс: состояние, проблемы и перспективы развития». Чебоксары, Волжский филиал МАДИ, 2012. — С. 125—131.
дипломов