Статья опубликована в рамках: XIII Международной научно-практической конференции «Естественные и математические науки в современном мире» (Россия, г. Новосибирск, 09 декабря 2013 г.)
Наука: Информационные технологии
Секция: Системный анализ, управление и обработка информации
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

ИДЕНТИФИКАЦИЯ МНОГОМЕРНОЙ НЕЛИНЕЙНОЙ СТАЦИОНАРНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЫ ПРИ НАЛИЧИИ АВТОКОРРЕЛИРОВАННЫХ ПОМЕХ В ВЫХОДНЫХ СИГНАЛАХ
Руднев Кирилл Константинович
аспирант, Самарский государственный университет путей сообщения, РФ, г. Самара
IDENTIFICATION OF MULTI-DIMENSIONAL NON-LINEAR STATIONARY DYNAMIC SYSTEM IN THE PRESENCE OF AUTOCORRELATED NOISES IN OUTPUT SIGNALS
Rudnev Kirill Konstantinovich
candidate, Samara State Transport University, Russia Samara city
аннотация
В статье предложен численный метод оценивания параметров нелинейных динамических систем, описываемых разностными уравнениями при наличии помех наблюдения в выходных сигналах.
Abstract
There is numerical method of estimation of parameters of multi-dimensional non-linear dynamic system, classified difference equations in the presences inquiry interference in output signals.
Ключевые слова: идентификация; нелинейная динамическая система; состоятельная оценка.
Keywords: identification; non-linear dynamic system; consistent estimate.
Для решения многих задач на железнодорожном транспорте, например, таких как прогнозирование расхода электроэнергии, контроль функционального состояния машинистов, прогнозирование геометрических параметров рельсовой колеи, прогнозирование расхода топлива и т. д., применяются модели на основе разностных уравнений. Многие из этих задач нелинейные, в связи с чем возникает задача построения математических моделей на основе нелинейных разностных уравнений.
Рассмотрим многомерную стационарную нелинейную динамическую систему с дискретным временем ![]() , описываемую следующим уравнением:
, описываемую следующим уравнением:
![]()
![]() , (1)
, (1)
где  ;
;  =
= ![]() ,
,![]() ,
,
где: ![]() — наблюдаемые и ненаблюдаемые векторы выходных сигналов,
— наблюдаемые и ненаблюдаемые векторы выходных сигналов,
(![]() ,
, ![]() є
є![]() ),
), ![]() наблюдаемые векторы входных сигналов (
наблюдаемые векторы входных сигналов (![]() є
є![]() ).
).
Идентификация объекта сводится к процедуре определения матриц неизвестных параметров ![]() по {
по {![]() ,
, ![]() } при известных порядках
} при известных порядках ![]() и
и ![]() и является задачей параметрического оценивания.
и является задачей параметрического оценивания.
В общем случае, последовательность ![]() не является последовательностью независимых случайных векторов, поэтому представляет интерес случай аддитивных локальных автокоррелированных шумов в качестве наблюдений.
не является последовательностью независимых случайных векторов, поэтому представляет интерес случай аддитивных локальных автокоррелированных шумов в качестве наблюдений.
Пусть выполняются следующие условия:
10. Множество, которому априорно принадлежат истинные значения параметров устойчивой нелинейной многомерной системы, является компактом.
2°. ![]() не зависят от
не зависят от ![]() .
.
30. Случайные последовательности ![]() удовлетворяют условиям:
удовлетворяют условиям:
E(![]() ) = 0 п.н.;
) = 0 п.н.;
E(![]() = D>0
= D>0
![]()
![]() ;
;
E(![]() ,
,
где: ![]() — случайная матрица,
— случайная матрица,
![]() — матрица локальных автокоррелированных функций;
— матрица локальных автокоррелированных функций; ![]()
40. Вектор входных сигналов ![]() и векторы
и векторы ![]() , …
, … ![]() и истинные параметры удовлетворяют условию:
и истинные параметры удовлетворяют условию:
 ,
,
где: H — положительно определенная матрица.
50. Пусть ![]() ,
,
 ,
,
где ![]() : имеет размерность
: имеет размерность ![]()
![]() :
: ![]() , где
, где ![]() — положительно определенные матрицы, элементы которых
— положительно определенные матрицы, элементы которых ![]() являются значениями локальной автокоррелированной функции в различные моменты времени.
являются значениями локальной автокоррелированной функции в различные моменты времени.
Уравнение (1) можно записать в виде:
 или (2)
или (2)
![]()
![]()
Представляем уравнение (2) в виде системы уравнений (2) ![]() :
:
 (3)
(3)
где ![]() j строка матриц
j строка матриц ![]() j строка матриц
j строка матриц ![]() ;
;
Уравнение (3) запишем следующим образом:
 ;
;
где ![]() ,
, ![]() ,
,
![]() ,
, ![]() =
=![]()
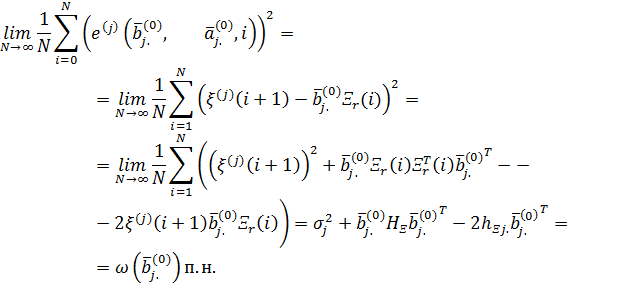
Введем следующую обобщенную ошибку для j-уравнения:
![]() ;
;
Из условий ![]() и
и ![]() следует, что обобщенная ошибка имеет нулевое среднее, а ее локальная дисперсия с вероятностью 1 равно:
следует, что обобщенная ошибка имеет нулевое среднее, а ее локальная дисперсия с вероятностью 1 равно:
Определим оценки ![]() неизвестных истинных значений параметров
неизвестных истинных значений параметров ![]() из условия минимума суммы взвешенных квадратичных отклонений
из условия минимума суммы взвешенных квадратичных отклонений ![]() с весом
с весом ![]() :
:
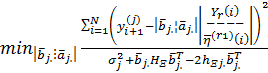 (4)
(4)
Справедливо следующее утверждение:
Пусть стационарная нелинейная динамическая система с нулевыми начальными условиями описывается уравнением (1) и помехи удовлетворяют условиям ![]() . Кроме того, истинные значения параметров
. Кроме того, истинные значения параметров ![]() и входные сигналы удовлетворяют условиям
и входные сигналы удовлетворяют условиям ![]() . Тогда оценка
. Тогда оценка ![]() определяемая выражением (4) при
определяемая выражением (4) при ![]() существует и является сильно состоятельной оценкой, т.е.
существует и является сильно состоятельной оценкой, т.е. ![]() .
.
На основе данной статьи было создано прикладное программное обеспечение, которое позволит получать состоятельные оценки моделей и прогноза потребления энергоресурсов на железной дороге.
Список литературы:
1.Кацюба О.А., Жданов А.И. Идентификация по методу наименьших квадратов параметров уравнений авторегрессии при аддитивных ошибках измерений // Автоматика и телемеханика. — 1982. — № 2. — с. 29—38
2.Кацюба О.А., Жданов А.И. Особенности применения МНК для оценивания линейных разностных операторов в задачах идентификации объектов управления // Автоматика и телемеханика. — 1979. — № 8. — с. 86—95.
3.Гантмахер Ф.Р. Теория матриц. М.: Физматлит, 2010.
дипломов