Статья опубликована в рамках: I Международной научно-практической конференции «Естественные и математические науки в современном мире» (Россия, г. Новосибирск, 24 декабря 2012 г.)
Наука: Физика
Секция: Физика магнитных явлений
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

МОДЕЛИРОВАНИЕ ПРИЗМАТИЧЕСКОГО ТРЕХФАЗНОГО АКТУАТОРА
Крживка Владимир
докторант кафедры электроэнергетики
Чешского технического университета в Праге,
г. Прага
Е-mail: krivkvla@fel.cvut.cz
Данная статья была написана в ходе работе по гранту: GACR P102/11/0498.
В данной статье рассматривается математическая модель однонаправленного трехфазового актуатора (линейного привода), его принцип работы, его числовое решение с использованием рабочих параметров и характеристик для различных значений тока возбуждения, приводятся полученные результаты и указывается дальнейшее направление работы.
Во многих сферах промышленности используются устройства с перемещением по точным координатам, работа которых основана на механических, пневматических, гидравлических принципах и, как правило, требующая дополнительное (газовое, масленное, водное) оснащение.
К рассмотрению предлагается иной способ достижения перемещения на плоскости: изменение электромагнитного поля во времени. Управление движением будет осуществляться через изменение величины возбуждающих токов с постоянной частотой 50 Гц. На рисунке 1 приведены два варианта конструкции устройства.
Как видно из рисунка 1, в канавках магнитной цепи 1, которые могут находиться либо в одной или в обеих частях схемы, находятся трехфазные или многофазные обмотки 2. Актуатор работает в немагнитной среде, предпочтительно в воздухе. Между нижней и верхней частями магнитной цепи находится электропроводящая, но немагнитнопроводяющая пластина 3 (например, из алюминия), которая под воздействием электродинамических сил левитирует и может перемещаться в направлении оси ![]() [3, c. 1].
[3, c. 1].

Рисунок 1. Варианты конструкции призматичного актуатора [3, c. 1]
(слева — с простой обмоткой, справа — с двойной обмоткой)
1 —магнитная цепь; 2 — трехфазные (многофазные) обмотки;
3 — электропроводящая, но немагнитнопроводяющая пластина
Гармонические токи, протекающие через обмотки 2 в магнитной цепи 1, создают изменяющееся магнитное поле, являющееся типичным представителем бегущей волны. Это поле создает в пластине 3 ток почти в противоположеном направлении (т. е. сдвиг практически на 180°) относительно возбуждающих токов (рисунок 2).
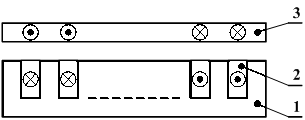
Рисунок 2. Возбуждающие токи и токи индуцированные в проводящей пластине [3, c. 1]
В результате взаимодействия между магнитными полями, созданными токами возбуждения, и токами, индуцированными в пластине, возникает сила ![]() , которая состоит из двух компонентов:
, которая состоит из двух компонентов: ![]() и
и ![]() .
.
Компонент ![]() — сила отталкивания пластины от магнитной цепи (т. е. в направлении по оси
— сила отталкивания пластины от магнитной цепи (т. е. в направлении по оси ![]() ). При условии, что
). При условии, что ![]() >
>![]() (гравитационная сила пластины), пластина может свободно левитировать в зазоре магнитной цепи. Пластина будет перемещаться по оси
(гравитационная сила пластины), пластина может свободно левитировать в зазоре магнитной цепи. Пластина будет перемещаться по оси ![]() , когда компонент
, когда компонент ![]() ≠0 (рисунок 3).
≠0 (рисунок 3).
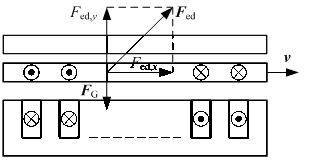
Рисунок 3. Силы в системе [3, c. 2]
Построение математической модели устройства основывается на численном решении для его характеристик и эксплуатационных параметров при различных амплитудах. Ограничивающими условиями являются значения температур обоих проводников обмотки возбуждения и самой пластины, данные температуры с учетом использования изоляционного материала не должны превышать 200°C [3, c. 2].
Решение поставленной задачи не может обойтись без введения ряда упрощений. Главным из них является игнорирование третьего размера, а именно, пренебрегая влиянием краевых эффектов в направлении оси ![]() , принимаем, что актуатор в направлении данной оси имеет бесконечную длину, и решение задачи будет проведено в плоскости
, принимаем, что актуатор в направлении данной оси имеет бесконечную длину, и решение задачи будет проведено в плоскости ![]() .
.
Другим упрощающим предположением является то, что относительная проницаемость магнитной цепи является постоянной. Благодаря воздушному зазору в системе, который приводит к более высокому магнитному сопротивлению магнитного пути, значение магнитного насыщения железа не слишком высоко и находится в линейной части характеристики намагничивания. Введение данного упрощения поможет предотвратить возникновение большой ошибки в расчетах.
Предположение, что пластина перемещается только направлении ![]() практически удовлетворяет действительности, поскольку магнитная цепь покрыта веществом с низким коэффициентом трения, таких, как тефлон, с наличием узкого воздушного зазора, следовательно, наклон пластины в воздушном зазоре маловероятен.
практически удовлетворяет действительности, поскольку магнитная цепь покрыта веществом с низким коэффициентом трения, таких, как тефлон, с наличием узкого воздушного зазора, следовательно, наклон пластины в воздушном зазоре маловероятен.
Уравнения движения плиты могут быть записаны в виде [4, c. 286]
![]() , (1)
, (1)
где: ![]() — скорость пластины в направлении
— скорость пластины в направлении ![]() ;
;
![]() — вес пластины;
— вес пластины;
![]() — сумма внешних сил, действующих в направлении
— сумма внешних сил, действующих в направлении ![]() .
.
Начальные условия для системы уравнений (1) будут выглядеть следующим образом
![]() . (2)
. (2)
Член ![]() состоит из электродинамической силы вождения
состоит из электродинамической силы вождения ![]() и, как правило, нескольких пассивных сопротивлений, действующих против
и, как правило, нескольких пассивных сопротивлений, действующих против ![]() .
.
Сумму всех электродинамических сил, действующих на пластину, найдем с помощью интегрирования объемных сил по всему объему пластины в соответствии с уравнениями
![]() (3)
(3)
Одно из пассивных сопротивлений, действующих против ![]() , состоит из сопротивления трения, вызванного на поверхности магнитной цепи (которая покрыта скользящим изоляционным слоем), и имеет значение равное
, состоит из сопротивления трения, вызванного на поверхности магнитной цепи (которая покрыта скользящим изоляционным слоем), и имеет значение равное
![]() , (4)
, (4)
где: ![]() — суммарная сила, которая толкает пластину на верхнюю или нижнюю части магнитной цепи. Эта сила возникает при сложении силы тяжести пластины
— суммарная сила, которая толкает пластину на верхнюю или нижнюю части магнитной цепи. Эта сила возникает при сложении силы тяжести пластины ![]() и
и ![]() -компоненты электродинамической силы
-компоненты электродинамической силы ![]() .
.
Другое пассивное сопротивление равно аэродинамическому, действующему в направлении противоположном движению пластины. Данное сопротивление может быть определено из соотношения [4, c. 286]
![]() , (5)
, (5)
Где: ![]() — плотность воздуха;
— плотность воздуха;
![]() — размер передней поверхности пластины;
— размер передней поверхности пластины;
![]() — коэффициентом сопротивления.
— коэффициентом сопротивления.
После подстановки в (1), получим систему из двух нелинейных дифференциальных уравнений, которые необходимо решить численно.
Приведем наглядный пример, целью которого является оценка следующих зависимостей:
1. суммарной электродинамической силы, действующей на пластину в направлении оси ![]() от положения пластины;
от положения пластины;
2. суммарной электродинамической силы, действующей на пластину в направлении оси ![]() от положения пластины;
от положения пластины;
3. суммарной электродинамической силы, действующей на пластину в направлении оси ![]() от значения плотности тока в возбуждающих обмотках (катушках);
от значения плотности тока в возбуждающих обмотках (катушках);
4. положения подвижной пластины актуатора от времени;
5. скорости движущейся пластиной актуатора от времени.
С учетом допущений, значения, полученные в программе Agros2D [2], [5], расчитаны на 1 м длины по оси z. Таким образом, задача решена как двумерная с небольшими погрешностями. Геометрическое решение трехфазного актуатора показано на рисунке 4, а итоговая конфигурация трехфазовой обмотки — на рисунке 5. Список строительных материалов вместе с их физическими свойствами приведены в Таблице 1.
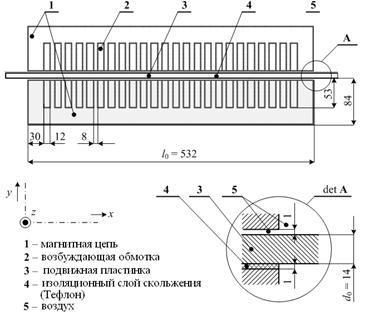
Рисунок 4. Геометрическое решение трехфазного актуатора [1, c. 3740]
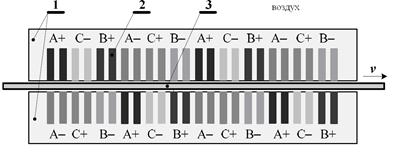
Рисунок 5. Конфигурация трехфазовой обмотки [1, c. 3740]
Вначале в программе Agros2D [2], [5], создается схема актуатора в соответствии с рисунком 5, после этого определяются области (рисунки 4 и 5) с физическими свойствами, приведенными в Таблице 1, затем плитка пошагово (шаг равен 0,004 м) пропускается в зазоре так, чтобы каждая канавка попала, по крайней мере, на три таких шага. После расчетов записываем значение суммарной электродинамической силы, действующей на пластину в направлении оси ![]() при различных токах трехфазовой обмотоки (см. рисунки 6—9). Для автоматизации и ускорения расчетов был создан сценарий в программе Python Lab.
при различных токах трехфазовой обмотоки (см. рисунки 6—9). Для автоматизации и ускорения расчетов был создан сценарий в программе Python Lab.
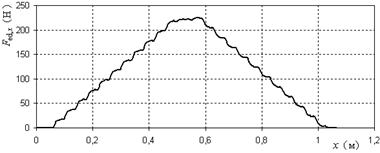
Рисунок 6. Зависимость суммарной электродинамической силы, действующей на пластину в направлении оси x от положения пластины при нулевой скорости и плотности тока 4 А/мм2
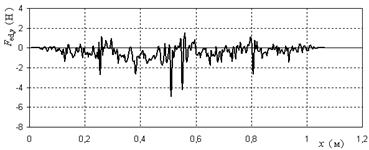
Рисунок 7. Зависимость суммарной электродинамической силы, действующей на пластину в направлении оси y от положения пластины при нулевой скорости и плотности тока 4 А/мм2
Таблица 1.
Физические свойства использованных материалов [1, c. 3742], [3, c. 18]
|
Материал |
Свойство |
Значение |
|
Магнитная цепь — углеродистая сталь 12 040 |
Относительная магнитная проницеамость |
2000 |
|
Трехфазные медные катушки |
Относительная магнитная проницеамость
Диаметер провода
Количество проводов
Коэффициент заполнения
Электрическая проводимость
Частота
Плотность тока |
1 1 мм 1700 0,785 4,47·107 S/м 50 Гц 1;2;4;6·106 А/мм2 |
|
Подвижная аллюминивая пластина (Al 99,75 %) |
Относительная магнитная проницеамость
Электрическая проводимость Длина пластины l |
1 3,4·107 S/м 0,532 м |
|
Тефлоновая скользящая поверхность |
Относительная магнитная проницеамость |
1 |
|
Воздушный зазор и наружный воздух |
Относительная магнитная проницеамость |
1 |
* скорректировано относительно коэффициента заполнения
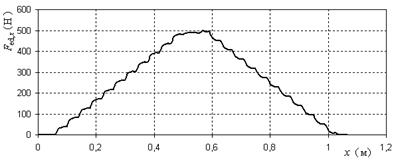
Рисунок 8. Зависимость суммарной электродинамической силы, действующей на пластину в направлении оси x от положения пластины при нулевой скорости и плотности тока 6 А/мм2
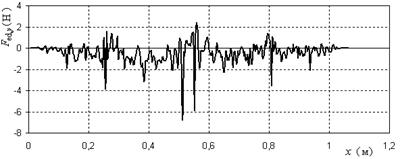
Рисунок 9. Зависимость суммарной электродинамической силы, действующей на пластину в направлении оси y от положения пластины при нулевой скорости и плотности тока 6 А/мм2
Из рисунков 8 и 9 видно, что суммарная электродинамическая сила, действующая на пластину по оси ![]() , имеет колебательный характер, что объясняется наличием числовой погрешности программы. В идеальном варианте эта сила близка к нулю, и, в сравнении с силой тяжести пластины (204,6 Н), пренебрежимо мала, поэтому, при нахождении следующих зависимостей: позиции пластины от времени и скорости пластины от времени, можно данной силой пренебречь.
, имеет колебательный характер, что объясняется наличием числовой погрешности программы. В идеальном варианте эта сила близка к нулю, и, в сравнении с силой тяжести пластины (204,6 Н), пренебрежимо мала, поэтому, при нахождении следующих зависимостей: позиции пластины от времени и скорости пластины от времени, можно данной силой пренебречь.
Далее представлена зависимость максимальной электродинамической силы, действующей на пластину по оси х, от плотности тока (рисунок 10). Вид зависимости близок к квадратичной, что связано с тем, что значение магнитного насыщения магнитной цепи находится в линейной части характеристики намагничивания. С увеличением насыщения магнитной цепи (в нелинейном случае), эта зависимость не увеличивается квадратично, а медленнее. Линейный случай обеспечивает максимально возможное значение силы и параметров движения (скорость) пластины в актуаторе.
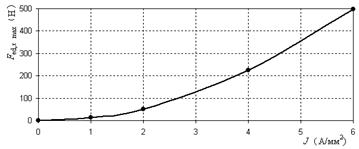
Рисунок 10. Зависимость максимальной электродинамической силы, действующей на пластину по оси x, от плотности тока
На рисунке 11 показаны значения магнитного поля актуатора, рассчитанные в программе Agros2D [2], [5], при положении пластины на расстоянии ![]() м по оси х при плотности тока
м по оси х при плотности тока ![]() А/мм2 в обмотке трехфазового актуатора.
А/мм2 в обмотке трехфазового актуатора.

Рисунок 11. Значения магнитного поля актуатора при положении пластины на расстоянии 0,3 м по оси х при плотности тока 6 А/мм2
Расчитаем зависимости положения пластины на оси абсцисс от времени и скорости пластины по оси х от времени при различных плотностях тока.
Зависимость скорости пластины от времени определяется из соотношения [4, c. 18]
![]() , (6)
, (6)
где: ![]() — скорость пластины (м/с) в момент времени
— скорость пластины (м/с) в момент времени ![]() ;
;
![]() — скорость пластины (м/с) в момент времени
— скорость пластины (м/с) в момент времени ![]() ;
;
![]() — суммарная электродинамическая сила, действующая на пластину в направлении оси
— суммарная электродинамическая сила, действующая на пластину в направлении оси ![]() в момент времени
в момент времени ![]() (в положении пластины
(в положении пластины ![]() ), значение находим из рисунка 6 или 8, в зависимости от значения плотности тока;
), значение находим из рисунка 6 или 8, в зависимости от значения плотности тока;
![]() — вес пластины (
— вес пластины (![]() кг);
кг);
![]() — коэффициент трения (
— коэффициент трения (![]() );
);
![]() — плотность воздуха (
— плотность воздуха (![]() кг/м3 при температуре
кг/м3 при температуре ![]() °C);
°C);
![]() — размер передней панели пластины (
— размер передней панели пластины (![]() м2);
м2);
![]() — коэффициент аэродинамического сопротивления (
— коэффициент аэродинамического сопротивления (![]() );
);
![]() — начальная скорость пластины (
— начальная скорость пластины (![]() м/с);
м/с);
![]() — разница времени
— разница времени ![]() ;
;
![]() — количество шагов расчета.
— количество шагов расчета.
Положение пластины во времени ![]() можно определить по формуле [3, c. 19]:
можно определить по формуле [3, c. 19]:
![]() , (7)
, (7)
где: ![]() — положение пластины в момент времени
— положение пластины в момент времени ![]() ;
;
![]() — положение пластины в момент времени
— положение пластины в момент времени ![]() ;
;
![]() — начальное положение пластны (
— начальное положение пластны (![]() м);
м);
На рисунках 12 и 13 представлены зависимости положения пластины и скорости пластины по оси х от времени при плотностях тока равных 4 и 6 А/мм2 и начальных условиях, которые перечислены выше.

Рисунок 12. Зависимость положения пластины от времени при различных плотностях тока
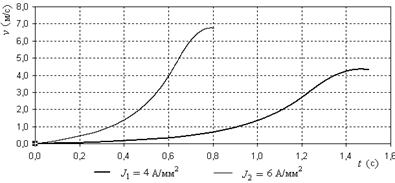
Рисунок 13. Зависимость скорости пластины по оси х от времени при различных плотностях тока
В заключение необходимо сказать, что на данном этапе не было рассмотрено влияние других факторов, например, частота тока возбуждения, толщина подвижной пластины, ширина воздушного зазора и т. п. Поскольку задача представляет собой комплекс взаимосвязанных проблематик, характеризующихся взаимодействием магнитного и температурного полей, объясняющееся тем, что потепление различных частей оборудования приводит к изменению их физических параметров (например, электропроводности или проницаемости), которые могут повлиять на распределение магнитного поля, в будущем планируется рассмотреть поле термоупругих деформаций, и как его следствие изменение геометрического решения актуатора.
Также необходимо заметить, что расчет зависимостей положения пластины на оси х и скорости пластины по оси х от времени при различных плотностях тока в соответствии с уравнениями (6) и (7) выполнен с использованием метода Эйлера, который требует большое количество времени для расчета, поскольку величина шага должна быть очень маленькая и, соответственно, количество шагов достаточно велико для поддержания требуемой точности расчета. В связи с этим, в дальнейшем, планируется использовать метод Рунге-Кутты, так как при большей величине шага (количество шагов меньше) точность расчета такая же, как в использованном методе, а время, затраченное на расчет значительно меньше.
Кроме указанных факторов, влияющих на точность расчетов, к ним можно отнести и то, что расчет силы проводился при нулевом значении скорости, хотя на каждом шагу величина менялась, поэтому на следующих этапах работы планируется вести расчет силы при актуальном значении скорости.
Список литературы:
1.Doležel, I., Donátová, M., Karban, P., Ulrych, B. Coupled Analysis of a 3-Phase Linear Actuator// In ICEMS 2008: Proceedings of the 11th International Conference on Electrical Machines and Systems (October, 2008). — Wu-han, China, 2008. — p. 3740—3745.
2.Karban P. et al: Agros2D-an application for the solution of physical fields. [Электронный ресурс]. — Режим доступа: http://agros2d.org (дата обращения 15.11.2012).
3.Křivka V., Modelování trojfázového aktuátoru: odborná studie. — ČVUT, FEL v Praze, Praha, 2012.
4.Křivka V., Electromagnetic damping system with three permanent magnets// Acta Technika, 2012.Vol. 57. № 3. — P. 283—294.
5.Šolín P. et al: Hermes2D-higher-order modular finite element system. [Электронный ресурс]. — Режим доступа: http://hpfem.org (дата обращения 19.11.2012).
дипломов