
Статья опубликована в рамках: VIII Международной научно-практической конференции «Физико-математические науки и информационные технологии: проблемы и тенденции развития» (Россия, г. Новосибирск, 26 ноября 2012 г.)
Наука: Информационные технологии
Секция: Системный анализ, управление и обработка информации
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов
УПРАВЛЕНИЕ С ПЕРЕМЕННОЙ СТРУКТУРОЙ СЛОЖНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
УПРАВЛЕНИЕ С ПЕРЕМЕННОЙ СТРУКТУРОЙ СЛОЖНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
Маркин Василий Евгеньевич
канд. техн. наук, доцент МГУ им. адм. Г.И. Невельского, г. Владивосток
Воробьев Алексей Юрьевич
канд. техн. наук, доцент ДВФУ, г. Владивосток
e-mail: vasily_markin@mail.ru
Актуальной задачей современной теории управления является создание высокоэффективных алгоритмов и систем управления для управления сложными динамическими объектами. К классу сложных динамических объектов можно отнести такие объекты, как манипуляционные роботы, подводные аппараты, станки для сложной обработки т. д. Характерными особенностями подобных объектов являются большая размерность математической модели, нелинейности различного вида в математической модели, многосвязность, а также значительная структурная и параметрическая неопределенность, проявляющаяся в процессе функционирования.
Причинами параметрической неопределенности могут быть как динамические свойства самого объекта (например, изменение конфигурации манипулятора приводит к многократному изменению приведенного момента инерции), так и действие среды. Математически такой вид неопределенности можно оценить следующим образом:
![]() , (1)
, (1)
где Pi — некоторый параметр. В процессе функционирования параметры объекта могут принимать значение из диапазона между минимальным и максимальным значением.
Для синтеза алгоритмов и систем управления сложными динамическими объектами в условиях неопределенности используются различные подходы: адаптивный, робастный, нейросетевой и т. д. В работе в качестве базового используется алгоритм управления с переменной структурой. Работающие с использованием данного алгоритма системы с переменной структурой (СПС) известны достаточно давно как релейные системы с разрывным управлением [3]. Управление с переменной структурой обычно строится в следующем виде:
 (2)
(2)
где ![]() — уравнение поверхности переключения (скольжения) в пространстве состояния Rn, содержащем фазовые координаты объекта x1,…xn. Традиционно рассматриваются системы второго порядка, в этом случае пространство состояний вырождается в фазовую плоскость, а поверхность переключения — в линию переключения [3, 4]. Уравнение поверхности (линии) переключения может быть как линейным, так и нелинейным. В простейшем случае линия переключения представляет собой прямую. В этом случае поверхность переключения задается некоторым вектором параметров C размерности (n x 1), где n — порядок системы. Характерная особенность систем с переменной структурой (СПС) — наличие так называемого скользящего режима [4]. Скользящий режим — особый динамический режим системы, движение в котором происходит по поверхности переключения s=0, построенной в фазовом пространстве Rn (рис. 1).
— уравнение поверхности переключения (скольжения) в пространстве состояния Rn, содержащем фазовые координаты объекта x1,…xn. Традиционно рассматриваются системы второго порядка, в этом случае пространство состояний вырождается в фазовую плоскость, а поверхность переключения — в линию переключения [3, 4]. Уравнение поверхности (линии) переключения может быть как линейным, так и нелинейным. В простейшем случае линия переключения представляет собой прямую. В этом случае поверхность переключения задается некоторым вектором параметров C размерности (n x 1), где n — порядок системы. Характерная особенность систем с переменной структурой (СПС) — наличие так называемого скользящего режима [4]. Скользящий режим — особый динамический режим системы, движение в котором происходит по поверхности переключения s=0, построенной в фазовом пространстве Rn (рис. 1).

Рисунок1. Скользящий режим в СПС
Основное условие существования скользящего режима определяется следующим образом [4]:
![]() . (3)
. (3)
В скользящем режиме система работает в режиме переключений, происходящих теоретически с бесконечно большой частотой. Траектория движения системы теоретически определяется лишь уравнением линии переключения, не зависящим от параметров системы (например, от варьируемой нагрузки). Переходные процессы в скользящем режиме устойчивы и монотонны. Для обеспечения приемлемых динамических свойств системы необходима начальная настройка параметров, для которой традиционно применяется минимаксный метод: вектор параметров c выбирается таким, чтобы при любом наборе начальных условий выполнялось условие существования скользящего режима (3). Иначе говоря, значения коэффициентов линии переключения выбираются с учетом максимального значения изменяющегося параметра pi max (1). Это позволяет обеспечить возникновение скользящего режима при любых начальных условиях. Вместе с тем быстродействие системы (которое также определяется значениями элементов вектора c) становится невысоким. Это является одним из основных недостатков традиционных СПС. Для увеличения быстродействия применяется адаптация по параметру скользящего режима [5]. Адаптивный алгоритм настройки коэффициента линии переключения c имеет следующий вид:
![]() (4)
(4)
где kc — коэффициент пропорциональности, m, md — соответственно текущее и эталонное значения параметра скольжения [1, 2].
В работе исследуется адаптивное управление приводом манипуляционного робота. Структурная схема системы автоматического управления приведена на рис. 2.
Рисунок 2. Структурная схема системы управления приводом степени подвижности
Для реализации принципа переменности структуры в работе применяется релейное управление:
![]() , (5)
, (5)
В свою очередь,
![]()
![]() , (6)
, (6)
где c — коэффициент плоскости скольжения (переключения).
Для имитационного моделирования использовался пакет Simulink, входящий в Matlab. Результаты моделирования в виде трехмерной фазовой траектории системы представлены на рис. 3.
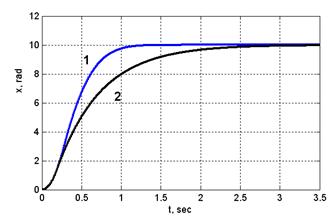
Рисунок 3. Фазовые траектории и временные процессы системы третьего порядка: 1 — без адаптации, 2— с адаптацией.
Моделирование показывает существенное улучшение быстродействия при использовании адаптивного управления. Кроме того, имеет место существенное улучшение динамических показателей качества по сравнению с традиционными алгоритмами управления.
Дальнейшее направление исследований — обеспечение большей робастности алгоритмов управления по отношению к параметрам объекта и регулятора. Таким образом, разработаны алгоритмы управления сложным динамическим объектом высокого порядка в условиях существенной параметрической неопределенности. На основе предложенных алгоритмов синтезированы адаптивные системы управления. Проведены численные эксперименты, продемонстрировавшие высокую эффективность предложенных решений.
Список литературы:
1.Дыда А.А., Маркин В.Е. Системы управления с переменной структурой с парными и нелинейно деформируемыми поверхностями переключения. // Проблемы управления. — 2005, № 1. С. 22—25.
2.Маркин В.Е. Субоптимальное по быстродействию управление сложными динамическими объектами в условиях неопределенности. / Труды XIII Байкальской Международной школы-семинара по методам оптимизации. Т. 2 — Иркутск, 2005. С. 177—181.
3.Теория систем с переменной структурой. / Под ред. С.В. Емельянова — М.: Наука, Главная редакция физико-математической литературы, 1970 — 592 с.
4.Уткин В.И. Скользящие режимы в задачах оптимизации и управления. — М: Наука, Главная редакция физико-математической литературы, 1981 — 368 с.
5.Dyda A.A. Design of Adaptive VSS algorithms for Robot Manipulator Controls. Proc. Of First Asia Control Conference. Tokyo, July 27—30, 1994. Pp 1077—1080.
дипломов