
Статья опубликована в рамках: XLVI Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 24 июня 2015 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
РАЗРАБОТКА РОБОТИЗИРОВАННОГО КОМПЛЕКСА ДЛЯ ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО ЭКСПРЕСС-КОНТРОЛЯ ТВЕРДЫХ И ДИСПЕРСНЫХ МАТЕРИАЛОВ
Кирина Мария Валерьевна
магистрант
Тамбовского государственного технического университета,
РФ, г. Тамбов
E -mail: slyfox197@rambler.ru
Чуриков Александр Алексеевич
канд. техн. наук, профессор кафедры «Управление качеством и стандартизация» Тамбовского государственного технического университета,
РФ, г. Тамбов
E-mail:
DEVELOPMENT ROBOTIC COMPLEX FOR THERMAL NON-EXPRESS SOLID AND CONTROL DISPERSE MATERIALS
Maria Kirina
undergraduate of Tambov State Technical University,
Russia, Tambov
Alexander Churikov
candidate of Science, professor of "Quality management and standardization" of Tambov State Technical University,
Russia, Tambov
АННОТАЦИЯ
Проведены исследования, теоретического и экспериментального характера, работоспособности тепловой инспекционной робототехнической системы, состоящей из модулей, построенных на базе транспортного робота горизонтального или вертикального перемещения, технологической платформы, на которой установлено измерительное и инспекционное оборудование и подсистемы управления движением и измерениями. Настоящий технологический комплекс неразрушающего теплового контроля (НТК) является одним из основных компонентов проекта по созданию комплексной системы диагностики внешних теплоизоляционных свойств.
ABSTRACT
Conducted research, theoretical and experimental, performance, thermal inspection robotic system composed of modules based on transport robot horizontal or vertical movement, a technological platform, which is equipped with measuring and inspection equipment and subsystems traffic management and measurement. This technological complex of non-destructive thermal control (STC) is one of the main components of the project to create integrated diagnostic system external thermal insulation properties.
Ключевые слова: неразрушающий тепловой контроль; технологические роботы вертикального и горизонтального перемещения; импульсные методы; неразрушающий экспресс-контроль (НЭК); теплофизические свойства (ТФС); теплоизоляционные материалы; расчетные зависимости, измерительная мехатронная система.
Keywords: non-destructive thermal control; technological robots vertical and horizontal movement; pulse methods; nondestructive express-control (NEC); thermal properties (TPS); thermal insulation materials; Depending on the design, measurement mechatronic system.
В настоящее время большое внимание уделяется проблеме энергосбережения, что обусловлено, в первую очередь, высокими ценами на энергоресурсы. Решение проблемы минимизации тепловых потерь для объектов, производящих, передающих или использующих тепловую энергию, напрямую зависит от качества применяемых теплоизоляционных материалов. Одними из важнейших качественных характеристик этих материалов являются их теплофизические свойства (ТФС), такие как теплоемкость, теплопроводность и температуропроводность.
Современные методы позволяют оперативно определять теплофизические свойства, не подвергая материал разрушению. Для определения качества изделий необходимо измерение теплофизических свойств в нескольких участках, подверженных повреждениям и потере тепловых свойств, например, на участках ближе к краю и по центру. Мобильные роботы в настоящее время используются в промышленности и в местах труднодоступных, неудобных или опасных для человека.
Как правило, снятие показаний ТФС предусматривает ручной труд, при этом человек длительное время совершает монотонную работу, что сказывается на его утомляемости и снижению эффективности работы в целом. Поэтому наша задача разработать робототехническую систему контроля свойств участка горизонтальной и поверхности изделий и автоматизировать данный технологический процесс. Для этого требуется разработать манипулятор, передвигающийся по заданной траектории по поверхности материала для снятия показаний датчика. Таким образом, для исследования тепловых свойств участка поверхности изделий наиболее подходящий для нас, с точки зрения оперативности, представляют информационно-измерительные системы (ИИС), реализующие импульсные методы, позволяющие осуществлять неразрушающий экспресс-контроль (НЭК) ТФС твердых материалов.
Для реализации метода НК ТФС изделий из теплоизоляционных материалов, разработана робототехническая установка «Испытательный стол», изображенная на рисунке 1, измерения проводятся по отдельным точкам термограмм. За основу робототехнической установки был выбран стол, выпускаемый на заводе «Twitte».
На рисунке 1 отмечено цифрами 1 — стол, 2 — координатное передвижение, 3 — мобильный измерительный зонд (МИЗ). Общий вид МИЗ изображен на рисунке 2, который является основным измерителем.
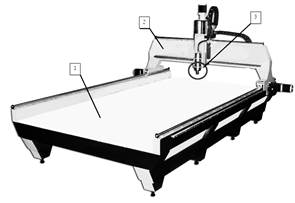
Рисунок 1. Испытательный стол
 а)
а) 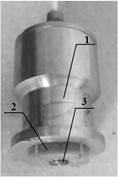
б)
Рисунок 2. Мобильный измерительный зонд: а) общий вид; б) измерительный блок в составе: 1 — металлический корпус. 2 — эталонный сравнительный образец. 3 — оригинальный блок, содержащий: интегральный датчик температуры, плоский круглый датчик теплового потока, плоский круглый нагреватель
Тепловому контролю подлежат образцы различных, но весьма небольших размеров, следовательно, наиболее приемлемым будет моделирование исследуемого образца в виде полуограниченного тела. Организацию нагрева полуограниченного тела наиболее просто осуществить через участок простейшей геометрической формы, поэтому мы выбираем круг как участок поверхности исследуемого образца, через который поступает тепловой поток.
Математические модели относительного и абсолютного методов неразрушающего контроля комплекса теплофизических свойств (теплопроводности и температуропроводности), предполагают тепловое воздействие постоянным во времени тепловым потоком плотностью ![]() .
.
В этих методах основным экспериментальным параметром является временная интегральная характеристика температуры поверхности нагреваемого образца вида:
 p> 0,
p> 0, ![]()
где: S(t) — измеряемая средне-интегральная температура нагреваемого круга,
p — параметр преобразования Лапласа.
Математическая модель для относительного метода определения теплофизических свойств предполагает наличие двух полуограниченных тел, соприкасающихся в плоскости ![]() , причем значения величин теплопроводности
, причем значения величин теплопроводности ![]() и температуропроводности
и температуропроводности ![]() верхнего тела известны и постоянны.
верхнего тела известны и постоянны.
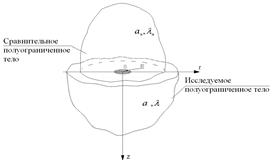
Рисунок 4. Модель измерительного блока для относительного метода НК теплофизических свойств
Предполагаем, что в эксперименте выполняются следующие условия:
· исследуемое (![]() ) и сравниваемое (
) и сравниваемое (![]() ) тела по отношению к тепловому воздействию являются полуограниченными (рисунок 4);
) тела по отношению к тепловому воздействию являются полуограниченными (рисунок 4);
· в плоскости контакта действует источник тепла в виде круга ![]() , выделяющий удельный тепловой поток Q(t), причем теплообмен между телами пренебрежимо мал и тепловые потоки, направленные каждый в одно соответствующее тело от источника тепла, имеют постоянные по координате r плотности
, выделяющий удельный тепловой поток Q(t), причем теплообмен между телами пренебрежимо мал и тепловые потоки, направленные каждый в одно соответствующее тело от источника тепла, имеют постоянные по координате r плотности ![]()
· удельный тепловой поток Q(t), а, следовательно, и тепловые потоки ![]() ограничены во времени.
ограничены во времени.
· в плоскости контакта z = 0 температура исследуемого тела равна температуре сравниваемого тела.
· тела имеют постоянную одинаковую начальную температуру (считаем ее равной нулю).
При данных допущениях температурное поле двух соприкасающихся полуограниченных тел будет описываться решением следующей осесимметричной краевой задачи:
![]() ,
,
(t> 0, 0 ≤ r <∞, 0 ≤ z <+∞);
Величину теплопроводности материала находим по формуле:
![]() .
.
Для определения значений величин теплопроводности λ исследуемого тела необходимо знать значения интегральных характеристик температуры, а также значения интегральной характеристики удельной тепловой мощности, выделяемой плоским круглым нагревателем (эта мощность в процессе эксперимента задается).
Измерительная мехатронная система управляется с помощью контроллера по заданному алгоритму проведения НК ТФС в точках, определенных оператором или в точках, где эксплуатируется изделия, задаваемых технологом. Блок-схема управления испытательным столом изображена на рисунке 5.
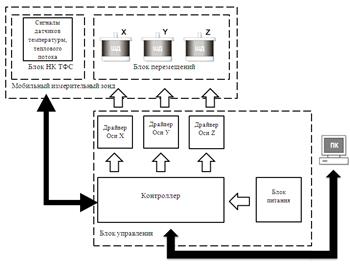
Рисунок 5. Блок-схема управления роботизированным испытательным столом для НЭК ТФС участка горизонтальной или вертикальной поверхности изделий
Таким образом, благодаря применения манипуляторов автоматизированной робототехнической измерительной системы, нет необходимости использовать ручной труд оператора, вносящий значительную погрешность в проведение НК ТФС, и измерять тепловой поток, направленный в исследуемое тело, при четко автоматически поддерживаемом тепловом контакте, что значительно упрощает конструкцию зонда и измерительную схему измерительной мехатронной системы, а, следовательно, повышает надежность работы всей экспериментальной установки.
Список литературы:
1.Градецкий В.Г., Рачков М.Ю. Роботы вертикального перемещения М.: Тип. Мин. Образования РФ. 1997. — 223 с.
2.Карташов Э.М. Аналитические методы в теории теплопроводности твердых тел. М.: Высшая школа, 2001.
3.Кирина М.В., Сычев В.А., Чуриков А.А., Расчетные зависимости абсолютного и относительного методов определения теплопроводности твердых и дисперсных материалов// Труды ТГТУ. Тамбов: Изд-во Тамб. гос. техн. ун-та, 2015, Вып. 41.
4.Чуриков А.А. Разработка и исследование методов и устройств для автоматического неразрушающего контроля температурозависимых теплофизических свойств твердых теплозащитных материалов: Дис. ... канд.техн.наук. М.: МИХМ, 1980.
5.Russell R. Andrew; Paoloni, Frank J.A. Robot Sensor for Measuring Thermal Properties of Gripped Objects. // Instrumentation and Measurement, IEEE Transactions on (Volume: IM-34, Issue: 3 ). Sept. 1985. Page(s): 458—460.
дипломов