Статья опубликована в рамках: XLII Международной научно-практической конференции «Инновации в науке» (Россия, г. Новосибирск, 25 февраля 2015 г.)
Наука: Технические науки
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
ОБЩИЕ ПРИНЦИПЫ АППАРАТНО-ПРОГРАММНОГО ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ РЕКОНФИГУРИРУЕМОЙ СИСТЕМЫ ФУНКЦИОНАЛЬНОГО КОНТРОЛЯ И ДИАГНОСТИКИ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА
Савкин Леонид Васильевич
аспирант ФГУП «НПО им. С.А. Лавочкина», начальник бюро РЭТ Филиала ФГУП «НПО им. С.А. Лавочкина», РФ, г. Калуга
E -mail: android4.1@mail.ru
GENERAL PRINCIPLES OF HARDWARE-SOFTWARE CREATION AND FUNCTIONING RECONFIGURABLE SYSTEM OF THE FUNCTIONAL MONITORING AND DIAGNOSTICS ONBOARD COMPLEX TO CONTROL OF THE SPACECRAFT
Leonid Savkin
post-graduate student, chief of bureau, The Branch of Federal Enterprise “Lavochkin Association”, Russia, Kaluga
АННОТАЦИЯ
Рассмотрены общие принципы аппаратно-программного построения и функционирования реконфигурируемой системы функционального контроля и диагностики бортового комплекса управления космического аппарата. Предложен подход по сопоставлению регистрируемых и эталонных данных о неисправностях бортового комплекса управления непосредственно в реконфигурируемом вычислительном поле. Приведена структурная схема организации процесса диагностирования бортового комплекса управления.
ABSTRACT
The general principles of hardware-software creation and functioning of reconfigurable system functional control and diagnostics onboard complex to control of the spacecraft are considered. Approach on comparison of the registered and reference data on malfunctions onboard complex to control directly in a reconfigurable computing field is offered. The skeleton diagram of organization the process diagnosing onboard complex to control is provided.
Ключевые слова: бортовой комплекс управления; диагностическая модель; реконфигурация; корреляция; реконфигурируемое вычислительное поле.
Keywords: onboard complex to control; diagnostic model; reconfiguration; correlation; reconfigurable computing field.
Целью данной статьи является обобщение некоторых промежуточных результатов, полученных в ходе исследования и разработки основополагающих принципов аппаратно-программного построения и функционирования реконфигурируемой системы функционального контроля и диагностики (СФКД) бортового комплекса управления (БКУ) космического аппарата (КА), реализовать которую в [5] и [6] предлагалось на основе реконфигурируемых вычислительных систем (РВС).
Ключевой проблемой, решению которой в данный момент уделено самое пристальное внимание, является исследование способов адаптивной реконфигурации диагностических моделей в реконфигурируемом вычислительном поле (РВП) СФКД при анализе и идентификации технического состояния БКУ КА с заданной степенью точности. С этой целью помимо кластеризации диагностических моделей, которое было предложено в [7], рассматривается возможность прямого корреляционного анализа контролируемых параметров БКУ совместно с эталонными сигнатурами, хранение которых осуществляется во внешней памяти совместно с конфигурационными наборами аппаратных архитектур в классификаторе аппаратно-программных неисправностей БКУ. При этом речь идет, безусловно, об адаптации аппаратной архитектуры диагностических моделей БКУ КА в полностью автоматическом режиме, который лишь при нештатных ситуациях позволит осуществлять коррекцию методов и алгоритмов бортового диагностирования БКУ при непосредственном обслуживании КА со средств наземного комплекса управления.
На рисунке 1 представлен принцип адаптивной реконфигурации диагностических моделей в РВП СФКД, который начинается с выбора конкретного метода диагностирования БКУ.
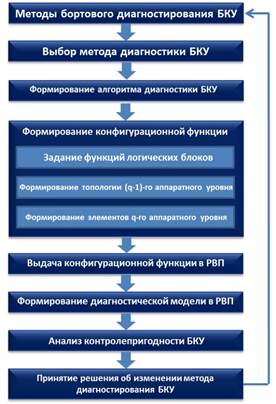
Рисунок 1. К пояснению принципа адаптивной реконфигурации диагностических моделей в РВП СФКД
Возможности РВП позволяют реализовать широкий класс как методов бортового диагностирования БКУ, так и частных алгоритмов диагностики, направленных на более детальную локализацию неисправностей и отказов БКУ на самых низких аппаратных уровнях. Как аппаратную организацию БКУ, так и ее программно-алгоритмическую часть рекомендуется классифицировать в виде условных функциональных уровней относительно всей системы еще на самых начальных этапах проектирования и разработки диагностического обеспечения БКУ КА. От решения данного вопроса зависит как достоверность идентификации неисправного участка БКУ, так и возможность высокой степени локализации регистрируемых неисправностей и отказов БКУ, что в комплексе должно быть отражено в базе данных аппаратно-программных неисправностей и отказов БКУ, реализуемой посредством классификатора СФКД.
На основе выбранного алгоритма диагностики производится формирование значений конфигурационных функций ![]() для каждого из аппаратных уровней
для каждого из аппаратных уровней ![]() диагностической модели в РВП. Данный процесс осуществляется в три этапа:
диагностической модели в РВП. Данный процесс осуществляется в три этапа:
1. Производится присвоение функций коммутируемым логическим блокам (КЛБ) в фрагменте РВП;
2. Формируется топология логико-арифметических связей (q-1)-го аппаратного уровня диагностической модели в РВП;
3. На основе двух вышеперечисленных этапов осуществляется формирование элементов более высоких аппаратных уровней q диагностической модели в РВП.
После формирования конфигурационных функций ![]() производится выдача их значений в РВП СФКД. Исходя из значений
производится выдача их значений в РВП СФКД. Исходя из значений ![]() , происходит построение аппаратных уровней диагностической модели и ее полная аппаратная реализация в РВП с возможностью многократного глубокого перестроения (реконфигурации) на всех аппаратных уровнях.
, происходит построение аппаратных уровней диагностической модели и ее полная аппаратная реализация в РВП с возможностью многократного глубокого перестроения (реконфигурации) на всех аппаратных уровнях.
На основе сформированной в РВП СФКД диагностической модели производится анализ контролепригодности БКУ КА. В случае если регистрируемая степень локализации неисправности или достоверность полученных результатов не удовлетворяют заданным оперативным требованиям, принимается решение об изменении либо частных алгоритмов диагностики БКУ, либо о необходимости изменить сам метод диагностирования БКУ КА.
Если первый вариант может не затрагивать перестроения всех аппаратных уровней диагностической модели в РВП, то второй вариант, как правило, будет требовать обязательного перестроения диагностической модели на всех ее аппаратных уровнях q в РВП СФКД, не исключая при этом первый аппаратный уровень — уровень КЛБ, где q=1.
На рисунке 2 представлена обобщенная структурная схема организации взаимодействий между основными функциональными составляющими реконфигурируемой СФКД БКУ в процессе анализа и идентификации технического состояния БКУ КА.
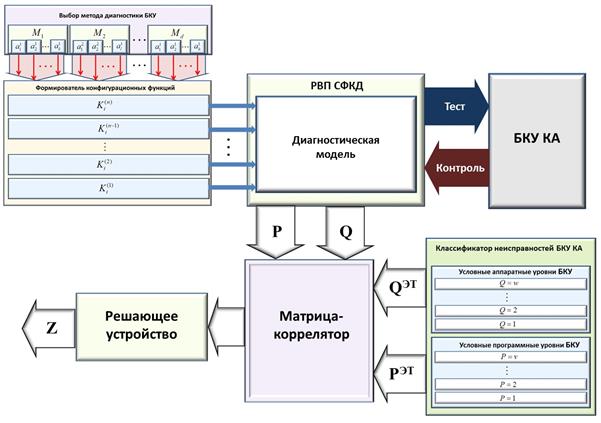
Рисунок 2. К пояснению общих принципов аппаратно-программного построения и функционирования реконфигурируемой СФКД БКУ КА
Данный рисунок более детально отражает все процессы, происходящие в СФКД, которые были рассмотрены выше. Из набора методов диагностирования ![]() , выбирается один из методов диагностирования
, выбирается один из методов диагностирования ![]() БКУ. В свою очередь, каждый из методов диагностирования
БКУ. В свою очередь, каждый из методов диагностирования ![]() представляет собой набор частных алгоритмов диагностики, соответствующих методу
представляет собой набор частных алгоритмов диагностики, соответствующих методу ![]() , что можно записать как
, что можно записать как
![]() ,
,
где: ![]() — порядковый номер метода диагностирования БКУ,
— порядковый номер метода диагностирования БКУ,
![]() — порядковый номер частного алгоритма диагностики
— порядковый номер частного алгоритма диагностики ![]() , относящегося к методу диагностирования
, относящегося к методу диагностирования ![]() .
.
Из данного рисунка также видно, что значения конфигурационных функций ![]() , описывающие особенности построения каждого аппаратного уровня диагностической модели передаются в РВП по отдельным независимым каналам, что необходимо, в первую очередь, для предоставления возможности изолированной коррекции каждого из аппаратных уровней диагностической модели в РВП СФКД.
, описывающие особенности построения каждого аппаратного уровня диагностической модели передаются в РВП по отдельным независимым каналам, что необходимо, в первую очередь, для предоставления возможности изолированной коррекции каждого из аппаратных уровней диагностической модели в РВП СФКД.
В процессе тестирования БКУ и анализа контролируемых параметров на выходе РВП формируются два вектора: вектор оценки условных аппаратных уровней БКУ Q и вектор оценки условных программных уровней БКУ P.
Сопоставление векторов Q и P с эталонными векторами QЭТ и PЭТ и их корреляционная оценка производится в матрице-корреляторе. При этом линейный коэффициент корреляции для аппаратных уровней БКУ вычисляется по формуле
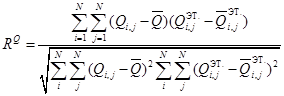 , (1)
, (1)
где: ![]() ,
, ![]() — двумерный сигнал вектора состояний аппаратных уровней БКУ и его эталон в дискретном представлении;
— двумерный сигнал вектора состояний аппаратных уровней БКУ и его эталон в дискретном представлении;
![]() ,
, ![]() — средние значения их выборок;
— средние значения их выборок;
i и j — независимые порядковые переменные;
N — общее число точек в двумерном поле сравнений, определяющее формат результатов сравнений векторов Q и QЭТ.
Линейный коэффициент корреляции для программных уровней БКУ вычисляется по формуле, аналогичной формуле (1), т. е.
где: ![]() ,
, ![]() — двумерный сигнал вектора состояний программных уровней БКУ и его эталон в дискретном представлении;
— двумерный сигнал вектора состояний программных уровней БКУ и его эталон в дискретном представлении;
![]() ,
, ![]() — средние значения их выборок;
— средние значения их выборок;
i и j — независимые порядковые переменные;
N — общее число точек в двумерном поле сравнений, определяющее формат результатов сравнений векторов P и PЭТ.
В данном случае речь идет о простом корреляционном классификаторе, на основе значений коэффициентов корреляции которого в решающем устройстве формируется итоговый вектор состояния БКУ ![]() , который можно представить в виде функциональной зависимости
, который можно представить в виде функциональной зависимости
![]() ,
,
получаемой в результате корреляционной оценки векторов Q и P с их эталонными значениями QЭТ и PЭТ в процессе анализа и идентификации технического состояния БКУ КА.
Здесь также необходимо отметить, что на первом этапе исследований способов сопоставления контролируемых параметров БКУ с эталонными параметрами, содержащимися в классификаторе реконфигурируемой СФКД, в качестве критерия оценки их степени сходства рассматривался классический критерий минимума расстояния, основанный на нахождении квадрата евклидова расстояния между регистрируемыми и эталонными параметрами векторов Q и P , т. е.
![]()
и
![]() .
.
Однако, из идейных соображений, связанных с необходимостью время от времени корректировать выборки измеряемых параметров векторов Q и P, было принято решение аппаратным образом реализовать в РВП и матрицу-коррелятор, что обеспечило возможность исследования других критериев оценки степени сходства регистрируемых и эталонных векторов состояний БКУ, используя один и тот же реконфигурируемый вычислительный ресурс фрагмента РВП, выделенного под построение матричного корреляционного анализатора.
На рисунке 3 схематично показан процесс диагностирования условных аппаратных уровней БКУ, заключающийся в сопоставлении регистрируемых данных вектора Q и эталонных данных вектора QЭТ, хранящихся в классификаторе аппаратно-программных неисправностей БКУ СФКД.
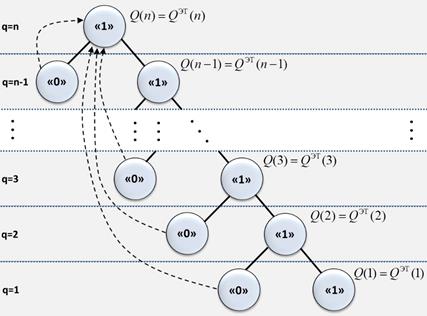
Рисунок 3. Организация процесса диагностирования условных аппаратных уровней БКУ КА
Из данного рисунка видно, что процесс диагностирования аппаратной части БКУ заключается в последовательном по отношению к условным аппаратным уровням БКУ сравнении регистрируемых параметров вектора Q с предварительно известными (или ожидаемыми) эталонными параметрами вектора QЭТ. Диагностирование БКУ начинается с верхнего аппаратного уровня всей аппаратной системы ![]() и продолжается до того аппаратного уровня БКУ, который требуется на данном этапе диагностирования. На графе поиска отказов в вершинах обозначены логические значения функций наличия либо отсутствия неисправности на промежуточном аппаратном уровне БКУ. При наличии зафиксированного отказа в БКУ на аппаратном уровне (n-1) поиск отказа понижается до уровня (n-2), и так происходит до тех пор, пока выбранный алгоритм и соответствующий ему метод диагностики БКУ не будут способны определить отказ на очередном условном аппаратном уровне q. Штрихованными стрелками здесь обозначена возможность СФКД вернуться на самый верхний аппаратный уровень БКУ для поиска неисправностей другими методами диагностирования БКУ, если используемый в данный момент времени метод не способен реализовать локализацию неисправности с заданной степенью точности.
и продолжается до того аппаратного уровня БКУ, который требуется на данном этапе диагностирования. На графе поиска отказов в вершинах обозначены логические значения функций наличия либо отсутствия неисправности на промежуточном аппаратном уровне БКУ. При наличии зафиксированного отказа в БКУ на аппаратном уровне (n-1) поиск отказа понижается до уровня (n-2), и так происходит до тех пор, пока выбранный алгоритм и соответствующий ему метод диагностики БКУ не будут способны определить отказ на очередном условном аппаратном уровне q. Штрихованными стрелками здесь обозначена возможность СФКД вернуться на самый верхний аппаратный уровень БКУ для поиска неисправностей другими методами диагностирования БКУ, если используемый в данный момент времени метод не способен реализовать локализацию неисправности с заданной степенью точности.
Выводы:
1. Рассмотрены основные особенности аппаратно-программного построения и функционирования реконфигурируемой СФКД БКУ КА в процессе анализа и идентификации технического состояния БКУ с заданной степенью точности;
2. Рассмотрена проблема адаптивной реконфигурации диагностической модели в РВП СФКД в процессе выбора наиболее эффективного метода и алгоритма диагностики БКУ КА;
3. Пояснены общие принципы процесса диагностирования БКУ КА на основе сопоставления регистрируемых данных о состоянии аппаратных и программных уровней БКУ с эталонными данными, хранящимися в классификаторе аппаратно-программных неисправностей реконфигурируемой СФКД.
Список литературы:
1.Алексеев А.А., Кораблев Ю.А., Шестопалов М.Ю. Идентификация и диагностика систем. М.: Издательский центр «Академия», 2009. — 352 с.
2.Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. и др. Бортовые системы управления космическими аппаратами. /Под ред. проф. А.С. Сырова М.: Изд-во МАИ-ПРИНТ, 2010. — 304 с.
3.Каляев И.А., Левин И.И., Семерников Е.А., Шмойлов В.И. Реконфигурируемые мультиконвейерные вычислительные структуры /Изд. 2-е, перераб. и доп. / Под общ. Ред. И.А. Каляева. Ростов-н/Д.: Изд-во ЮНЦ РАН, 2009. — 344 с.
4.Орлов С.А., Цилькер Б.Я., Организация ЭВМ и систем: Учебник для вузов. 3-е изд. Стандарт третьего поколения.-СПб.: Питер, 2014. — 688 с.
5.Савкин Л.В. Разработка реконфигурируемой системы функционального контроля и диагностики космического аппарата. Научно-техническая конференция студентов, аспирантов и молодых специалистов НИУ ВШЭ им. Е.В. Арменского. Материалы конференции. М.: МИЭМ НИУ ВШЭ, 2015. — С. 201—202.
6.Савкин Л.В. О построении многоканальных диагностических моделей в реконфигурируемой системе функционального контроля и диагностики космического аппарата. Перспективы развития науки и образования: Сборник научных трудов по материалам Международной научно- практической конференции 30 декабря 2014 г.: в 8 частях. Часть IV. М.: «АР-Консалт», 2015 г. — С. 80—82.
7.Савкин Л.В. Кластеризация диагностических моделей и их выделение из конфигурационных наборов аппаратных архитектур реконфигурируемой системы функционального контроля и диагностики космического аппарата [Текст] / Л.В. Савкин // Технические науки в России и за рубежом: материалы IV междунар. науч. конф. (г. Москва, январь 2015 г.). М.: Буки-Веди, 2015. — С. 26—28.
8.Шкляр В.Н. Надежность систем управления: учебное пособие/Томский политехнический университет. Томск: Изд-во Томского политехнического университета, 2009. — 126 с.
9.Hauck S. Reconfigurable computing. The theory and practice of FPGA-based computation. Morgan Kaufmann Publ., 2007. — 944 p.
дипломов