Статья опубликована в рамках: XV Международной научно-практической конференции «Проба пера» (Россия, г. Новосибирск, 28 апреля 2015 г.)
Наука: Информационные технологии
Секция: Информатика
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов
СОЗДАНИЕ И ПРОГРАММИРОВАНИЕ РОБОТОВ LEGO MINDSTORMS
Перепелкин Антон
Класс 6 «В», МБОУ СОШ № 155, РФ, г.о. Самара
Васильева Людмила Валентиновна
научный руководитель, учитель математики и информатики высшей категории МБОУ СОШ № 155, РФ, г.о. Самара
Робототехника — прикладная наука, занимающаяся разработкой технических систем. Робототехника опирается на такие дисциплины, как электроника, механика, программирование. Робототехника является одним из важнейших направлений научно-технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта.
Меня заинтересовала эта тема, потому что я считаю, что за роботами — будущее.
Я использовал LEGO Mindstorms — конструктор для создания программируемого робота. Он впервые представлен компанией LEGO в 1998 году.
Сначала я строил роботов только по инструкциям, не вникая в программирование. Но потом мне стало интересно, как программировать роботов. Со временем я во всем разобрался и теперь умею их программировать.
Мой первый робот назывался «Обходчик препятствий». Я сделал его на базе робота EV3MEG, созданного иностранным инженером Мартином Боогартсом, убрал роботу руки, облегчил основу, - и робот готов. Это первый робот, для которого я сам составил программу.
Робот состоит из балок различной длины, различных штырьковых осей, колес и шин. У этого робота два двигателя, датчик цвета и датчик расстояния. Два двигателя нужны, чтобы независимо работали колеса на каждой стороне. Для робота нужен «лабиринт» из коробок, по которому он будет ездить.

Рисунок 1. Робот «Обходчик препятствий»
Сначала, робот ждет, когда его поставят на зелёную отметку. Затем он проверяет, есть ли перед ним препятствие, если да, то он поворачивает на 90 градусов влево. Затем он снова проверяет, есть ли перед ним препятствие, если да, то он поворачивает уже на 190 градусов влево. А если препятствий нет, то он едет вперёд. Так он движется до красной отметки.
Программные модули:
1. Ожидание установки на зелёную отметку.
2. Цикл ожидания красной отметки. В него входит переключатель, измеряющий наличие преграды. (Если да, то поворот на 90* влево; если нет, то движение вперёд)
3. Завершение программы.
Второй робот, которого я построил, назывался «Стрелок». Это тот же «Обходчик препятствий», только с трёхзарядной пушкой и другой программой.
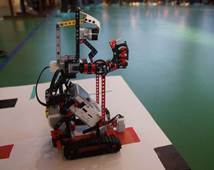
Рисунок 2. Робот «Стрелок»
Робот состоит из балок различной длины, различных штырьковых осей, колес, шин и особых деталей, из которых состоит пушка, на которую нужен отдельный двигатель. У этого робота три двигателя, датчик расстояния, датчик цвета и трёхзарядная пушка. Чтобы этот робот работал, мы нарисовали «поле», где он ездил.
При постройке этого робота были проблемы. Например, датчик цвета перестал правильно распознавать зеленый цвет. Из-за этого пришлось отказаться от этого цвета на «поле».
Сначала, робот ждет, когда его поставят на черную отметку. Затем он едет вперед. В это же время он проверяет наличие желтых и красных отметок. На желтой отметке он поворачивает на 110 градусов влево, а на красной — поворачивает на 90 град. вправо, стреляет и поворачивает обратно.
Программные модули:
1. Ожидание установки на черную отметку.
2. Движение вперёд.
3. Цикл ожидания зленной отметки. В него входит переключатель, измеряющий цвет. (Чёрный — поворот на 110* влево; белый — движение прямо; красный — выстрел.)
4. Завершение программы.
Мой третий робот — «Робот-сумоист».
Робот состоит из балок различной длины, различных штырьковых осей, колес, шин и гусениц. У этого робота два двигателя, датчик цвета и датчик расстояния. При постройке этого робота было много проблем.

Рисунок 3. Робот-сумоист
Он сконструирован так, что левые колеса не крутятся назад и следовательно, он может поворачивать только вправо. Это нужно для того, чтобы роботу-сумоисту соперника было труднее толкать нашего робота. Для испытания этого робота мы с родителями нарисовали на ватмане широкий черный очерченный круг.
При включении программы робот проверяет, есть ли перед ним препятствие, если да, он толкает этот предмет. Если нет, то он поворачивает на 22,5 градуса вправо, и снова проверяет наличие предметов. В это же время он проверяет наличие черных линий, ограничивающих поле. Если линия обнаружена, то он разворачивается.
1. Одновременно действующие циклы:
I. Переключатель, измеряющий наличие преграды. (Да — движение вперёд; нет — поворот на 22,5* вправо)
II. Переключатель, измеряющий цвет. (Чёрный — поворот на 180* вправо; белый — ничего.)
Алгоритм движения роботов создается в программе «LEGO MINDSTORMS home edition». Программа состоит из модулей. У каждого модуля есть свой значок. Модули делятся на типы. У каждого типа модулей свой цвет в программе.
Различают шесть типов модулей:
Первый тип модулей — Действие.
Второй тип модулей — Управление операторами.
Третий тип модулей — Датчики.
Четвертый тип модулей — Операции с данными.
Пятый тип модулей — Дополнения.
Это программные модули для сторонних датчиков и двигателей.
Шестой тип модулей — Мои блоки.
Это модули созданные самостоятельно.
Мне было очень интересно создавать своих роботов. В будущем мне очень понадобятся навыки в робототехнике, ведь я планирую крупный проект. Я хочу создать робота с захватом движений рук!
В этом роботе будет использовано шесть компьютерных блоков Lego EV3, двенадцать больших, четыре средних моторов, большое количество деталей и четыре USB шнура.
Система захвата движений представляет собой экзоскелет, крепящийся на руки и спину. На каждой руке находятся по три больших и один средний моторы, работающие в режиме измерения угла поворота. На спине — три компьютерных блока.
Этот проект еще на стадии планирования.
Список литературы:
1.Попов Е.П., Медведев В.С. Роботы и ЭВМ. М., 1985.
2.Пети Ж.-П. О чем размышляют роботы. М., 1987.
3.Тимофеев А.В. Адаптивные робототехнические комплексы. Л., 1988.
4.[Электронный ресурс] — Режим доступа. — URL: http://mindstorms.lego.com/ Официальный сайт LEGO Mindstorms
5.[Электронный ресурс] — Режим доступа. — URL: https://ru.wikipedia.org/wiki/Mindstorms_(серия_LEGO)
дипломов