Статья опубликована в рамках: XXXVI Международной научно-практической конференции «Технические науки - от теории к практике» (Россия, г. Новосибирск, 23 июля 2014 г.)
Наука: Технические науки
Секция: Информатика, вычислительная техника и управление
Скачать книгу(-и): Сборник статей конференции
- Условия публикаций
- Все статьи конференции
дипломов

Статья опубликована в рамках:
Выходные данные сборника:
АВТОМАТИЧЕСКАЯ C ШИВКА ИЗОБРАЖЕНИЙ НА ОСНОВЕ ХАРАКТЕРНЫХ ТОЧЕК
Фам Конг Тханг
аспирант Тульского государственного университет, РФ, г. Тула
Email : pacotha@gmail.com
Данг Нгок Хоанг Тхань
аспирант Тульского государственного университет, РФ, г. Тула
Email : myhoangthanh@yahoo.com
Нгуен Ван Хьеу
канд. техн. наук университета Дананга, университета наук и технологии, Вьетнам, г. Дананг
Email: '; // -->
AUTOMATIC STITCHING IMAGES BASED ON CHARACTERISTIC POINTS
Pham Cong Thang
postgraduate student of Tula State University, Russia, Tula
Dang Ngoc Hoang Thanh
postgraduate student of Tula State University, Russia, Tula
Nguyen Van Hieu
candidate of technical science , Danang University, University of Science and Technology, VietNam, Da Nang
АННОТАЦИЯ
Приведена автоматическая сшивка на основе функциональных точек двух изображений. С помощью цилиндрической проекции, определено сопоставление функциональных точек, выполнено вычисление матрицы преобразования между соседними изображениями, определено фокусное расстояние цилиндрической проекции. Приведено полученное панорамное изображение с идеальным эффектом.
ABSTRACT
Provides automatic stitching based on characteristic points of two images. Using a cylindrical projection defined matching feature points, performed the computation matrix of transformation between adjacent images, defined focal length of the cylindrical projection. Panoramic image obtained with an ideal effect.
Ключевые слова: сопоставление функциональных точек; панорамное изображение; цилиндрическая проекция.
Keywords : matching characteristic points; panoramic image; and cylindrical projection.
Мозаика изображений является важной отраслью компьютерного зрения. Это связано с несколькими накладывающимися изображениями для получения плавного панорамного изображения широкой техники углов зрения. Процесс сшивки изображений можно охарактеризовать, как сшивания изображений при различных точках зрения для получения широкоэкранного зрения изображений.
В настоящее время существуют множество способов получения панорамы [2, 3]. Они сопоставляются непосредственно из перекрывающихся областей серого значения пикселя изображений, и может быть достигнуто мозаичное изображение. Большое количество серых пиксельных данных определяется в алгоритме, в расчете суммы общего количества серых пиксельных данных имеется недостаток, и мозаичное изображение более чувствительно к изменениям освещенности и геометрических искажений, вызванных линзами.
В данной работе представлен метод цилиндрических панорам на основе автоматического сопоставления особенностей [1]. Соответствующие функциональные точки были найдены на изображениях; чтобы найти две соответствующие позиции, упростим соответствующие стратегии, соответственно можем эффективно преодолеть изменения в освещенности и геометрических искажений в объективе.
Для захвата изображения на ![]() просматриваются фотографии, сделанные под разными углами в разных плоскостях проекции, если перекрывающиеся изображения непосредственно бесшовные, то уничтожается сопоставленность фактических визуальных сцен. Сцена становится прямой строчкой для того, чтобы поддерживать связь между фактическими сценами пространственных ограничений, которые должны быть отражены в полученное изображение. Плоскость проекции каждого изображения сопоставляется цилиндрической проекцией на стандарт проекции, и склеивание панорамного изображения выполняется только после цилиндрической проекции, полученного в визуальный ряд.
просматриваются фотографии, сделанные под разными углами в разных плоскостях проекции, если перекрывающиеся изображения непосредственно бесшовные, то уничтожается сопоставленность фактических визуальных сцен. Сцена становится прямой строчкой для того, чтобы поддерживать связь между фактическими сценами пространственных ограничений, которые должны быть отражены в полученное изображение. Плоскость проекции каждого изображения сопоставляется цилиндрической проекцией на стандарт проекции, и склеивание панорамного изображения выполняется только после цилиндрической проекции, полученного в визуальный ряд.
Во-первых, используем формулы метода сопоставления функциональных точек в [6], и получим матрицу преобразования между соседними изображениями, а затем используем формулы в [4] для оценки изображения и фокусного расстояния цилиндрической проекции.
Алгоритм сшивки
После проецирования изображений на цилиндрической поверхности, два изображения с аналогичными областями перекрываются. Проведем поиск подобных районов с помощью общих алгоритмов, основанных на визуальных характеристиках человека для определения вектора шаблона; соответственно, из расчета расстояния сходства двух изображений, основанного на подобии расстояния, чтобы найти аналогичные части изображений, были сопоставлены функциональные точки, можно предложить новый более простой и быстрый метод.
Установка точек ![]() для пары изображений
для пары изображений ![]() и
и ![]() , которые являются функциональными точками. Проектор изображений преобразуется в
, которые являются функциональными точками. Проектор изображений преобразуется в ![]() и
и ![]() , и
, и ![]() ,
, ![]() соответственно точкам
соответственно точкам ![]() и
и ![]() .
.
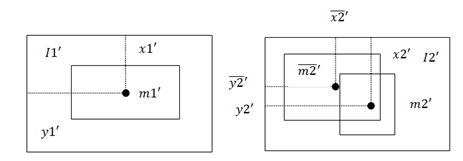
Рисунок 1. Найти шовные точки
На (рис. 1) представлено, что на изображения ![]() имеются точки
имеются точки ![]() . Задать её координаты
. Задать её координаты ![]() и в точке центра определить размер (
и в точке центра определить размер (![]() смежного окна, установить для точек
смежного окна, установить для точек ![]() координаты
координаты ![]() , выбрать 2-й район изображения
, выбрать 2-й район изображения ![]() в окне поиска точек центра, и определить размер
в окне поиска точек центра, и определить размер ![]() окна, c регионом из точки
окна, c регионом из точки ![]() и изображения
и изображения ![]() в возможной точке
в возможной точке ![]() ; с операциями в пределах данного окна, установить
; с операциями в пределах данного окна, установить ![]() , имеющей координаты
, имеющей координаты ![]() . С
. С ![]() и
и ![]() , значение корреляции определяется как
, значение корреляции определяется как

где ![]() представляет собой ковариацию точек
представляет собой ковариацию точек ![]() ' и
' и ![]() в связанном окне, может быть выражено в виде:
в связанном окне, может быть выражено в виде:
![]()

![]() указывает на изображение
указывает на изображение ![]() в точке
в точке ![]() в качестве центра c размером
в качестве центра c размером ![]() окрестности стандартного отклонения, которая может быть выражено в виде:
окрестности стандартного отклонения, которая может быть выражено в виде:

где ![]() в формулах (2), (3) указывает точку
в формулах (2), (3) указывает точку ![]() в значении серого пикселя корреляции окна и определяется как:
в значении серого пикселя корреляции окна и определяется как:

Из (1), связанному значению ![]() принять значение в диапазоне от -1 по 1, и связанное значение
принять значение в диапазоне от -1 по 1, и связанное значение ![]() больше, чем больше похожи
больше, чем больше похожи ![]() и
и ![]() . В фактическом процессе сопоставления, во-первых определить действительное значение корреляции порогового значения, с точки
. В фактическом процессе сопоставления, во-первых определить действительное значение корреляции порогового значения, с точки ![]() , когда значение вычисляемой корреляции
, когда значение вычисляемой корреляции ![]() превышает пороговое значение, что является функциональной точкой для
превышает пороговое значение, что является функциональной точкой для ![]() кандидата соответствующих точек в эксперименте, как точки сшивки, чтобы повысить точность, так что
кандидата соответствующих точек в эксперименте, как точки сшивки, чтобы повысить точность, так что ![]() . Учитывая
. Учитывая ![]() соответственно
соответственно ![]() и
и ![]() , которые соответствуют преобразованным точкам окна поиска, установить
, которые соответствуют преобразованным точкам окна поиска, установить ![]() , соответствующий порог, точки сшивки — 0.95. Найти алгоритм точки сшивки: случайно выбирается одна пара подходящих точек
, соответствующий порог, точки сшивки — 0.95. Найти алгоритм точки сшивки: случайно выбирается одна пара подходящих точек ![]() , соответствующие точки, полученные после проекционных преобразований
, соответствующие точки, полученные после проекционных преобразований ![]() и
и ![]() ; исполняется проекцирование трансформированных изображений
; исполняется проекцирование трансформированных изображений ![]() и
и ![]() на соответствующие сопоставления; если сопоставления в соответствии с требованиями существования, то выбрать оптимальное сопоставление, как результат конца алгоритма; в противном случае перейти к началу.
на соответствующие сопоставления; если сопоставления в соответствии с требованиями существования, то выбрать оптимальное сопоставление, как результат конца алгоритма; в противном случае перейти к началу.
Выше представлен алгоритм точек сшивки ![]() и
и ![]() , пусть изображение
, пусть изображение ![]() использует в качестве точек
использует в качестве точек ![]() , переместить изображения
, переместить изображения ![]() на
на ![]() , то есть, это операция сшивки двух изображений.
, то есть, это операция сшивки двух изображений.
Сшивка изображений
Из-за различных условий освещения, собранные изображения имеют большую разницу в яркости так, что строчка из яркости изображения будет производить разрыв, влияющий на получение панорамного эффекта. В настоящее время существует много способов решения данной проблемы, метод, используемый в данной работе — Szeliski [5]. В этом способе два перекрывающихся участка изображения серого значения произвольной точки Р:

Среди них, ![]() является соответствующими точками P на двух изображениях
является соответствующими точками P на двух изображениях ![]() серого значения;
серого значения; ![]() является линейной весовой функцией, значения в центре изображений — 1, a на границе — 0.
является линейной весовой функцией, значения в центре изображений — 1, a на границе — 0.
Экспериментальные результаты
Используем Matlab 7.0 для выполнения выше представленного алгоритма.
На рис. 2 представлены исходные изображения. На (рис. 3,4) представлены функциональные точки из двух изображений (рис. 1) и отображение сопоставления этих точек. И наконец, на (рис. 5) представлен результат процесса сшивки в панорамное изображение.

Рисунок 2. Исходные изображения

Рисунок 3. Функциональные точки изображений

Рисунок 4. Отображения несколько сопоставления в виде линии между двумя изображениями

Рисунок 5. Полученное панорамное изображение
Полученные результаты экспериментов показывают, что алгоритм является эффективным в связи с соответствием функциональных точек, вместо прямого использования в серой шкале информации для определения позиции двух изображений сопоставления, так и с традиционными алгоритмами поколения цилиндрической панорамы. Тем самым видным преимуществом метода является значительно повышение скорости поиска точек сшивки; и для увеличения разницы яркости двух изображений можем получить хороший результат. В целях повышения надежности алгоритма, выбрать несколько функциональных точек на двух изображениях, найденные точки сшивки будут рассматриваться в поисках пар функциональных точек, увеличиваясь до прямоугольной области.
Список литературы:
1.Dekta K., Levoy M., Cylindrical Panoramas. 2010. — [Электронный ресурс] — Режим доступа. — URL: http://graphics.stanford.edu/courses/cs178/applets/projection.html
2.Peleg S., Herman J. Panoramic mosaics by manifold projection. Rico P. Proceedings of the Conference on Computer Vision and Pattern Recognition. Los Alamitos: IEEE CS Press, 1997. — p. 338 —343.
3.Szeliski R., “Image Alignment and Stitching”- Microsoft Reasearch lab 2005.
4.Szeliski R., Shum H. Creating full view panoramic image mosaics and environment maps. Whitted T. Proceedings of ACM SIGGRAPH p97. Los Angeles: Addison Wesley, 1997. — p. 251 —258.
5.Szeliski R. Video mosaics for virtual environments. IEEE Computer Graphics and Applications, — 1996, — № 16 (2): — p. 22 —30.
6.Zhang AIJ. 2012. — [Электронный ресурс] — Режим доступа. — URL: http://research.microsoft.com/enus/um/people/zhang/Papers/ZhangAIJ95.pdf
дипломов